Вам также может понравиться
- Programa 2020 Estatica PDFДокумент60 страницPrograma 2020 Estatica PDFAnonymous 5rJ3AiОценок пока нет
- La FuerzaДокумент7 страницLa FuerzaMaryuri De La Concepcion Mejia MontalvanОценок пока нет
- Resumen-Dinc3a1mica Teorias y FormularioДокумент7 страницResumen-Dinc3a1mica Teorias y FormularioverajonasОценок пока нет
- INTRODUCCIONДокумент27 страницINTRODUCCIONSebastian FarfanОценок пока нет
- Actividad 2.2 - Sheyla VasconcelosДокумент28 страницActividad 2.2 - Sheyla VasconcelosSheyla Vasconcelos MendozaОценок пока нет
- MecánicaДокумент19 страницMecánicaMariangelicaОценок пока нет
- Resumen Dinc3a1micaДокумент9 страницResumen Dinc3a1micaAngela LabradorОценок пока нет
- Estatica de La Particula Conceptos BasicosДокумент39 страницEstatica de La Particula Conceptos Basicostachidito-chivas617067% (9)
- Manual de Física GeneralДокумент7 страницManual de Física Generalezequiel missОценок пока нет
- Fuerzas ConcurrentesДокумент10 страницFuerzas ConcurrentesOrnella PiacentiniОценок пока нет
- Unidad 1 EstaticaДокумент15 страницUnidad 1 EstaticaI am HashОценок пока нет
- Movimiento Rectilineo Uniforme TrabajoДокумент10 страницMovimiento Rectilineo Uniforme TrabajoDaniel ArturoОценок пока нет
- Nocion de FuerzasДокумент5 страницNocion de FuerzasJesús Espinoza GutierrezОценок пока нет
- PROYECTOДокумент6 страницPROYECTOMagdiel Ivan Santos MontielОценок пока нет
- Resumen - Ku JesusДокумент25 страницResumen - Ku JesusJesus Isaí Kú CamposОценок пока нет
- Qué Es La MecánicaДокумент2 страницыQué Es La MecánicaDalcio MassiОценок пока нет
- Resumen Física PREДокумент28 страницResumen Física PREGabriel Jesus FernándezОценок пока нет
- DINÁMICAДокумент50 страницDINÁMICATurco MoralesОценок пока нет
- Práctica No. 3 (Cuestionario Previo)Документ6 страницPráctica No. 3 (Cuestionario Previo)rebeccaОценок пока нет
- 06 - Ingreso 2018 - Unidad 4Документ10 страниц06 - Ingreso 2018 - Unidad 4valentinaОценок пока нет
- Fuerzas ParalelasДокумент7 страницFuerzas ParalelasNelson Andres PaezОценок пока нет
- Unidad 1 Introducción A La Estática de Las ParticulasДокумент33 страницыUnidad 1 Introducción A La Estática de Las Particulasmarioanastacio644Оценок пока нет
- Mecanica Electrica Industrial - IntroduccionДокумент46 страницMecanica Electrica Industrial - IntroduccionRocio BedogniОценок пока нет
- Blanco y Verde Simple Cómo Crear Una Presentación Oral de Canva Presentación Con Video PDFДокумент42 страницыBlanco y Verde Simple Cómo Crear Una Presentación Oral de Canva Presentación Con Video PDFP3DR0L1X MBОценок пока нет
- Equilibrio de FuerzasДокумент12 страницEquilibrio de FuerzasdanielОценок пока нет
- Laboratorio N°01 - Fuerzas en Equilibrio PDFДокумент23 страницыLaboratorio N°01 - Fuerzas en Equilibrio PDFRaul Rivera SanchezОценок пока нет
- Fundamentos de La EstáticaДокумент22 страницыFundamentos de La EstáticaMaría José OrtizОценок пока нет
- ESTATica FinalДокумент8 страницESTATica Finalluis ghastinОценок пока нет
- UTN FRD Estabilidad I Capitulo 1Документ11 страницUTN FRD Estabilidad I Capitulo 1VolniОценок пока нет
- Cinetica de La ParticulaДокумент14 страницCinetica de La ParticulaMiguel EncinasОценок пока нет
- Tarea 1 Estatica 1.4 Equilibrio de Una Partícula en El Plano y en El EspacioДокумент7 страницTarea 1 Estatica 1.4 Equilibrio de Una Partícula en El Plano y en El Espacioelizzabethh2202Оценок пока нет
- Foro 1Документ4 страницыForo 1x.villacis1992Оценок пока нет
- Documento Terminado Este SiДокумент26 страницDocumento Terminado Este SiKevin Edgardo Hércules LópezОценок пока нет
- FISICAДокумент12 страницFISICAMariana GarciaОценок пока нет
- Las Figuras AmorfasДокумент8 страницLas Figuras AmorfasMxm Monzter GervacioОценок пока нет
- Unidades de FuerzaДокумент4 страницыUnidades de FuerzasyliramОценок пока нет
- Leyes de NewtonДокумент42 страницыLeyes de NewtonAlanysОценок пока нет
- Leyes Del Movimiento de NewtonДокумент50 страницLeyes Del Movimiento de NewtonDaniel Fernando Romero CamargoОценок пока нет
- Texto FISICA 2021 2do ParcialДокумент24 страницыTexto FISICA 2021 2do ParcialGustavoОценок пока нет
- FuerzaДокумент13 страницFuerzaFranyeli BarretoОценок пока нет
- Estática DefinicionesДокумент8 страницEstática DefinicionesRUBY SOTO GONZALEZОценок пока нет
- Investigacion U 1Документ18 страницInvestigacion U 1Angel Lucho BaxinОценок пока нет
- Proyecto Final de Física y QuímicaДокумент20 страницProyecto Final de Física y QuímicaVictor Fabricio plasencia oyolaОценок пока нет
- PRRACTICA 5 Viga Sin CargaДокумент31 страницаPRRACTICA 5 Viga Sin CargaCarlos Galeana CastillejosОценок пока нет
- Presentación Equilibrio de Una Particula RecortadaДокумент11 страницPresentación Equilibrio de Una Particula RecortadaRicardo MartínezОценок пока нет
- Apuntes de Física - Milton C LДокумент6 страницApuntes de Física - Milton C LMilton CogolloОценок пока нет
- Conceptos de FisicaДокумент4 страницыConceptos de FisicaCarlos PojoyОценок пока нет
- Practica de Laboratorio Fisica DinamicaДокумент13 страницPractica de Laboratorio Fisica DinamicaMaria Cristina Huayapa Quispe0% (1)
- Resumen de La Unidad 3Документ6 страницResumen de La Unidad 3juan floresОценок пока нет
- Capitulo 4Документ29 страницCapitulo 4Jose NavasОценок пока нет
- Fuerza en FísicaДокумент16 страницFuerza en FísicaArisbe MoОценок пока нет
- Estabilidad - Equilibrio Del Punto MaterialДокумент14 страницEstabilidad - Equilibrio Del Punto MaterialMaru CattaneoОценок пока нет
- Interacción Entre FuerzasДокумент7 страницInteracción Entre FuerzasdionisiovОценок пока нет
- Fuerza FisicaДокумент8 страницFuerza FisicamikipmaxОценок пока нет
- Física I. Profesorado en Química. Unidad 2Документ37 страницFísica I. Profesorado en Química. Unidad 2Gabo_SchОценок пока нет
- Fisica - Sesión 3 - Dinámica-Fuerzas y Leyes de NewtonДокумент46 страницFisica - Sesión 3 - Dinámica-Fuerzas y Leyes de NewtonSergio OrdenesОценок пока нет
- Trabajo Sobre Equilibrio Fisica.Документ18 страницTrabajo Sobre Equilibrio Fisica.Angeles Angells71% (14)
- Unidad 3 EstaticaДокумент4 страницыUnidad 3 EstaticaNicole Saint-hilaireОценок пока нет
- Guía para el análisis y solución de problemas de resistencia de materialesОт EverandGuía para el análisis y solución de problemas de resistencia de materialesОценок пока нет
- Etp Servicio Periodico y Mantenimiento e Instalacion Accesoorios de VehciulosДокумент9 страницEtp Servicio Periodico y Mantenimiento e Instalacion Accesoorios de VehciulosAnonymous 5rJ3AiОценок пока нет
- Etp Servicio ProfesionalesДокумент6 страницEtp Servicio ProfesionalesAnonymous 5rJ3AiОценок пока нет
- Etp Adquisicion de Torre de IluminacionДокумент4 страницыEtp Adquisicion de Torre de IluminacionAnonymous 5rJ3AiОценок пока нет
- Especificaciones Tecnicas BateriasДокумент6 страницEspecificaciones Tecnicas BateriasAnonymous 5rJ3AiОценок пока нет
- Programa 2019 TermodinamicaДокумент42 страницыPrograma 2019 TermodinamicaAnonymous 5rJ3AiОценок пока нет
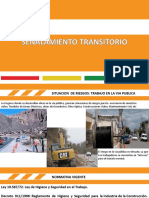
- Señalamiento TransitorioДокумент67 страницSeñalamiento TransitorioAnonymous 5rJ3AiОценок пока нет
- Etp Compra Neumaticos EquiposДокумент2 страницыEtp Compra Neumaticos EquiposAnonymous 5rJ3AiОценок пока нет
- Especificaciones Técnicas)Документ6 страницEspecificaciones Técnicas)Anonymous 5rJ3AiОценок пока нет
- Teoria de ExcavaciónДокумент51 страницаTeoria de ExcavaciónAnonymous 5rJ3AiОценок пока нет
- Etp Servicio Reparacion Semaforo RNN9Документ2 страницыEtp Servicio Reparacion Semaforo RNN9Anonymous 5rJ3AiОценок пока нет
- ET Repuesto y Aceite BL60Документ1 страницаET Repuesto y Aceite BL60Anonymous 5rJ3AiОценок пока нет
- Neumaticos EquiposДокумент4 страницыNeumaticos EquiposAnonymous 5rJ3AiОценок пока нет
- Curso de Metodologia Cualittiva CulminadoДокумент82 страницыCurso de Metodologia Cualittiva CulminadoAnonymous 5rJ3AiОценок пока нет
- Presentacion Las Delicias-PlanimetriaДокумент1 страницаPresentacion Las Delicias-PlanimetriaAnonymous 5rJ3AiОценок пока нет
- Probelmas Ambientales LambayequeДокумент9 страницProbelmas Ambientales Lambayequewaldo ruben100% (1)
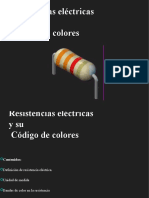
- Las ResistenciasДокумент11 страницLas ResistenciasLucaОценок пока нет
- Gran Plano GeneralДокумент3 страницыGran Plano GeneralRaymundo GarciaОценок пока нет
- ACTIVIDADES CENTENAS Milo y Roco SepДокумент4 страницыACTIVIDADES CENTENAS Milo y Roco SepEfraín EduardoОценок пока нет
- Operación Grúa TorreДокумент8 страницOperación Grúa TorrealdoОценок пока нет
- Ventilador de Tiro InducidoДокумент1 страницаVentilador de Tiro InducidoJuan RoaОценок пока нет
- Musica A Finales Del XIX y Principios Del XXДокумент3 страницыMusica A Finales Del XIX y Principios Del XXasdfghjklkjhgfdsОценок пока нет
- Caso ClinicoДокумент7 страницCaso ClinicoFátima BohorquezОценок пока нет
- Justificación Del Uso Del Cuaderno para 3 A PreescolarДокумент5 страницJustificación Del Uso Del Cuaderno para 3 A PreescolarCaro Maya100% (1)
- Foro Regresion Minimos Cuadrados IPAC 2020Документ3 страницыForo Regresion Minimos Cuadrados IPAC 2020Daniel Mercado PadillaОценок пока нет
- Deficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaДокумент15 страницDeficiencia de Vitamina B12 Como Etiología de Deterioro Cognitivo y DemenciaEricka FelizОценок пока нет
- Por Mi Favorito AbandonadoДокумент2 191 страницаPor Mi Favorito AbandonadoNikol Guzmán100% (2)
- Programa Analitico 1 Calidad Ambiental IДокумент16 страницPrograma Analitico 1 Calidad Ambiental Ifocos2005Оценок пока нет
- Levi-Strauss - Estructuralismo en Ling y en AntropДокумент11 страницLevi-Strauss - Estructuralismo en Ling y en AntropOscar JaimesОценок пока нет
- Mapa Mental 210Документ1 страницаMapa Mental 210Jessica HernándezОценок пока нет
- Escala SДокумент24 страницыEscala SSamantha Mallerly Villalta PomaОценок пока нет
- Cuestionario Cap 5Документ3 страницыCuestionario Cap 5Jacome MonserrathОценок пока нет
- Plan de Capacitación DocenteДокумент4 страницыPlan de Capacitación DocenteAngel Rivera HinostrozaОценок пока нет
- Gianna Michaels - Wikipedia, La Enciclopedia LibreДокумент11 страницGianna Michaels - Wikipedia, La Enciclopedia LibreRichi MamaniОценок пока нет
- Product BacklogДокумент1 страницаProduct Backlogedson molinaОценок пока нет
- Resumen 20 LineasДокумент1 страницаResumen 20 LineasKriïZtïi FxrïnxngöОценок пока нет
- Helicobacter PyloryДокумент11 страницHelicobacter PyloryVeronica Garcia Peñafiel100% (2)
- Moda Pasajera o TendenciaДокумент2 страницыModa Pasajera o TendenciaDaya AcostaОценок пока нет
- Ra DrenajesДокумент146 страницRa Drenajesuriel coronaОценок пока нет
- Alteraciones de La MemoriaДокумент4 страницыAlteraciones de La MemoriaMariana OrtizОценок пока нет
- Conceptos Generales de La InformaticaДокумент7 страницConceptos Generales de La InformaticaSergio Sanchez RojasОценок пока нет
- Manual de Usuario Del SIADEДокумент100 страницManual de Usuario Del SIADEPAOLA PATRICIA PEREZ GOMEZОценок пока нет
- Ensayo de La Pelicula de Ana FrankДокумент4 страницыEnsayo de La Pelicula de Ana Frankalejandra rosalesОценок пока нет
- NTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoДокумент6 страницNTP-1068 2016 Vibraciones Alternativas para Evaluar El RiesgoAnonymous IbHP1NYОценок пока нет
- Posición en RampaДокумент3 страницыPosición en RampaCARLOS FRANCISCO MANTILLA MONTALVOОценок пока нет