Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesДокумент14 страницPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeОценок пока нет
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10От EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Оценок пока нет
- FATEMEH Karimi Pour, MAHROKH Bavandi, AZLI YahyaДокумент5 страницFATEMEH Karimi Pour, MAHROKH Bavandi, AZLI YahyagerdОценок пока нет
- Pss Lab QuestionsДокумент7 страницPss Lab QuestionsPandyselvi BalasubramanianОценок пока нет
- Inverter and SV-PWMДокумент5 страницInverter and SV-PWMcoep05Оценок пока нет
- Electrical Systems Simulation LAB MANUAL 2019-2020Документ25 страницElectrical Systems Simulation LAB MANUAL 2019-2020Vinay Kumar50% (2)
- Electrical - Ijeeer - Wavelet Modulated Z-SourceДокумент10 страницElectrical - Ijeeer - Wavelet Modulated Z-SourceTJPRC PublicationsОценок пока нет
- Lab 5Документ6 страницLab 5Ross LevineОценок пока нет
- Modified Space Vector Modulated Z Source Inverter With Effective DC Boost and Lowest Switching StressДокумент8 страницModified Space Vector Modulated Z Source Inverter With Effective DC Boost and Lowest Switching StressMounika DivyaОценок пока нет
- Power Electronics Experiments ECE-P-672Документ9 страницPower Electronics Experiments ECE-P-672Sai SomayajulaОценок пока нет
- Absolute-Value Circuit Using JunctionДокумент4 страницыAbsolute-Value Circuit Using JunctionxongassilvaОценок пока нет
- AC Equivalent Circuit ModelingДокумент65 страницAC Equivalent Circuit Modelinghey_gluppyОценок пока нет
- A Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersДокумент4 страницыA Novel Scheme To Eliminate Common Mode Voltage in Multilevel InvertersJavier MaldonadoОценок пока нет
- Integrating ADCДокумент10 страницIntegrating ADCchintu333Оценок пока нет
- Series Line Impedance Line Charging AdmittanceДокумент13 страницSeries Line Impedance Line Charging AdmittancepreghieraОценок пока нет
- TEJAS M & M ReportДокумент6 страницTEJAS M & M ReportSachin AОценок пока нет
- Edc 21bee0321Документ16 страницEdc 21bee0321lakshit.choudhary2021Оценок пока нет
- Lab 4 (1903069)Документ4 страницыLab 4 (1903069)Tahsin Zaman TalhaОценок пока нет
- Analog To Digital Converter and Vise VersДокумент7 страницAnalog To Digital Converter and Vise VersSpyx MeniОценок пока нет
- Ds PICДокумент6 страницDs PICSindhuja VijayaraghavanОценок пока нет
- Psa QuestionДокумент8 страницPsa QuestionSumathra KОценок пока нет
- A Study of Sensor Less Control of Induction Motor at Zero Speed Utilizing High Frequency Voltage InjectionДокумент11 страницA Study of Sensor Less Control of Induction Motor at Zero Speed Utilizing High Frequency Voltage Injectionsajs201Оценок пока нет
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueДокумент7 страницDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Implementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Документ5 страницImplementation of A Single-Phase Unipolar Inverter Using DSP TMS320F241Pci ElectronicaОценок пока нет
- ANN Switched Z-Source Inverter Based PV Generation System: AbstractДокумент9 страницANN Switched Z-Source Inverter Based PV Generation System: AbstractsathishОценок пока нет
- Network 08-14 SaqibДокумент25 страницNetwork 08-14 SaqibAbdullah SohailОценок пока нет
- Digital Electronics-11 PDFДокумент5 страницDigital Electronics-11 PDFTapas BanerjeeОценок пока нет
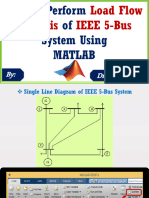
- Load Flow Analysis of IEEE 5 Bus SystemДокумент16 страницLoad Flow Analysis of IEEE 5 Bus Systemggate1998Оценок пока нет
- Load Flow Analysis of IEEE 5 Bus SystemДокумент16 страницLoad Flow Analysis of IEEE 5 Bus SystemBách Tạ DuyОценок пока нет
- Psim SVMДокумент9 страницPsim SVMNarendra ReddyОценок пока нет
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorДокумент7 страницFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidОценок пока нет
- Transient Recovery Voltages During The Switching Under Out-of-Phase ConditionsДокумент5 страницTransient Recovery Voltages During The Switching Under Out-of-Phase ConditionsRoberto SuОценок пока нет
- GS Power Flow Using PWДокумент4 страницыGS Power Flow Using PWRizanda LeihituОценок пока нет
- Estimating Dynamics of Switching Converters Using System Identification TechniqueДокумент8 страницEstimating Dynamics of Switching Converters Using System Identification TechniqueSmakshi ChoudharyОценок пока нет
- Abstract - Low Voltage Analysis With Coincidence CurvesДокумент3 страницыAbstract - Low Voltage Analysis With Coincidence Curvesivanich.tamasОценок пока нет
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakДокумент28 страницZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrОценок пока нет
- Solutions: Solutions Manual For Sensor Systems Fundamentals and Applications 1St Edition SilvaДокумент29 страницSolutions: Solutions Manual For Sensor Systems Fundamentals and Applications 1St Edition SilvaTumbal Gb0% (1)
- Sine PWM and Its Realization: DR - Arkan A.Hussein Power Electronics Fourth ClassДокумент11 страницSine PWM and Its Realization: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliОценок пока нет
- Itmf 2013-07-1 Freiburg EnuДокумент6 страницItmf 2013-07-1 Freiburg EnubcqbaoОценок пока нет
- Implementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterДокумент11 страницImplementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterАлексей ЯмаОценок пока нет
- Q02201300137Документ8 страницQ02201300137Vikas PatelОценок пока нет
- A Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorДокумент8 страницA Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorTiruchengode VinothОценок пока нет
- Biegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresДокумент11 страницBiegel B Wigner Function Simulation of Intrinsic Oscillations Hysteresis and Bistability in Resonant Tunneling StructuresAzhar MahmoodОценок пока нет
- PSSQPДокумент5 страницPSSQPDurai MuruganОценок пока нет
- 120EE1098 - Vennela Medaboina - Merged BEE Report-CompressedДокумент83 страницы120EE1098 - Vennela Medaboina - Merged BEE Report-CompressedSahasrabda Sai PradhanОценок пока нет
- Efecto Del Burden Sobre TrasnformadoresДокумент6 страницEfecto Del Burden Sobre TrasnformadoresEdgar JimenezОценок пока нет
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerДокумент12 страницDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaОценок пока нет
- Lab Procedures: (EE-455) Electrical Power System ProtectionДокумент17 страницLab Procedures: (EE-455) Electrical Power System Protectionax33m144Оценок пока нет
- EL - 124 Electronic Devices & Circuits: Experiment # 06Документ10 страницEL - 124 Electronic Devices & Circuits: Experiment # 06Jawwad IqbalОценок пока нет
- Harmonic Analysis of Three Phase PWM Inverter Systems Using MatlabДокумент8 страницHarmonic Analysis of Three Phase PWM Inverter Systems Using Matlabturbo385Оценок пока нет
- One Cycle ControlДокумент9 страницOne Cycle ControlNithin SebastianОценок пока нет
- Simplifi Ed SVPWM Based Hybrid PWM For Induction Motor Drives For The Reduction of Torque RipplesДокумент6 страницSimplifi Ed SVPWM Based Hybrid PWM For Induction Motor Drives For The Reduction of Torque RipplesKoukou AmkoukouОценок пока нет
- Predictive Current Control With Reduction of Switching Frequency For Three Phase VoltageДокумент6 страницPredictive Current Control With Reduction of Switching Frequency For Three Phase Voltagedaiduongxanh14113Оценок пока нет
- Cad Lab ManualДокумент15 страницCad Lab ManualSougata Ghosh100% (2)
- Speed Control of BLDC Motor Drive by Using Pid ControllersДокумент5 страницSpeed Control of BLDC Motor Drive by Using Pid ControllersMoin PashaОценок пока нет
- DECE Lab IeДокумент7 страницDECE Lab IemurthyОценок пока нет
- Direct Torque ControlДокумент5 страницDirect Torque ControljanusanusОценок пока нет
- Control For DummiesДокумент32 страницыControl For DummiesShyam BhatОценок пока нет
- Self-Oscillating Switching Technique For Current Source Parallel Resonant Induction Heating SystemsДокумент9 страницSelf-Oscillating Switching Technique For Current Source Parallel Resonant Induction Heating SystemsjandazОценок пока нет
- Identification of Synchronous Generator and Excitation System Transfer Functions For Q-V Control PurposeДокумент9 страницIdentification of Synchronous Generator and Excitation System Transfer Functions For Q-V Control PurposejandazОценок пока нет
- Invited Lecture IEEE - PES DR Zeljko Despotovic Dipl - IngДокумент104 страницыInvited Lecture IEEE - PES DR Zeljko Despotovic Dipl - IngDr Zeljko DespotovicОценок пока нет
- Code::Block Manual: For CS101x CourseДокумент60 страницCode::Block Manual: For CS101x CoursemariusmanescuОценок пока нет
- Thyristor Power Supply in Parallel Resonant Induction Heating CircutsДокумент12 страницThyristor Power Supply in Parallel Resonant Induction Heating CircutsjandazОценок пока нет
- The Use of Prony Analysis and Padé Approximation For The Identification of Transfer Functions of Excitation System ComponentsДокумент2 страницыThe Use of Prony Analysis and Padé Approximation For The Identification of Transfer Functions of Excitation System ComponentsjandazОценок пока нет
- Power-Frequency Control of Energy Storage InverterДокумент5 страницPower-Frequency Control of Energy Storage InverterjandazОценок пока нет
- Torque Ripple Reduction in DTCДокумент6 страницTorque Ripple Reduction in DTCjandazОценок пока нет
- Kloss Formula Parametrization by Analytical Method PDFДокумент5 страницKloss Formula Parametrization by Analytical Method PDFjandazОценок пока нет
- Kloss Formula Parametrization by Analytical Method PDFДокумент5 страницKloss Formula Parametrization by Analytical Method PDFjandazОценок пока нет
- ETS157Документ3 страницыETS157jandazОценок пока нет
- Power Converters On Mining MachinesДокумент5 страницPower Converters On Mining MachinesjandazОценок пока нет
- Derive 5 PDFДокумент58 страницDerive 5 PDFjandazОценок пока нет
- Preventive Maintenance and Reliability of LV Overcurrent Protective DevicesДокумент7 страницPreventive Maintenance and Reliability of LV Overcurrent Protective DevicesHamayoun MurtazaОценок пока нет
- Generator Grid Connection GuideДокумент46 страницGenerator Grid Connection GuideJim Watts100% (1)
- Impedance MeasurementsДокумент10 страницImpedance MeasurementsKunik SwaroopОценок пока нет
- Matpost07 0036 PaperДокумент6 страницMatpost07 0036 PaperTirthankar DattaОценок пока нет
- MV FRKRG Ver1.0ddДокумент112 страницMV FRKRG Ver1.0ddjandazОценок пока нет
- Elements of Style For Writing Scientific Journal ArticlesДокумент12 страницElements of Style For Writing Scientific Journal ArticlesShaukat MazariОценок пока нет
- Product Reliability and MTBF2Документ4 страницыProduct Reliability and MTBF2sifuszОценок пока нет
- White Paper Relaibility of UPSДокумент7 страницWhite Paper Relaibility of UPSMarino ValisiОценок пока нет
- Sistem Besprekidnog Napajanja Za Industrijske Uslove Rada: Beograd 2015. GodineДокумент6 страницSistem Besprekidnog Napajanja Za Industrijske Uslove Rada: Beograd 2015. GodinejandazОценок пока нет
- Generator Controls Voltage StabilityДокумент13 страницGenerator Controls Voltage StabilityhhipowerОценок пока нет
- ENTSO-E Network Code For Requirements For Grid Connection Applicable To All GeneratorsДокумент86 страницENTSO-E Network Code For Requirements For Grid Connection Applicable To All GeneratorsjandazОценок пока нет
- Generator ConnectionДокумент88 страницGenerator ConnectionjandazОценок пока нет
- Coordination of Voltage and Reactive Power Control in The Extra High Voltage Substations Based On The Example of Solutions Applied in The National Power SystemДокумент8 страницCoordination of Voltage and Reactive Power Control in The Extra High Voltage Substations Based On The Example of Solutions Applied in The National Power SystemjandazОценок пока нет
- Medium Voltage AC Drive MEGADRIVE-LCI Air-CooledДокумент136 страницMedium Voltage AC Drive MEGADRIVE-LCI Air-CooledjandazОценок пока нет
- Reactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisДокумент10 страницReactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisjandazОценок пока нет
- Vylto Seed DeckДокумент17 страницVylto Seed DeckBear MatthewsОценок пока нет
- The Website Design Partnership FranchiseДокумент5 страницThe Website Design Partnership FranchiseCheryl MountainclearОценок пока нет
- Saic-M-2012 Rev 7 StructureДокумент6 страницSaic-M-2012 Rev 7 StructuremohamedqcОценок пока нет
- Global Review Solar Tower Technology PDFДокумент43 страницыGlobal Review Solar Tower Technology PDFmohit tailorОценок пока нет
- Flyer Manuale - CON WATERMARK PAGINE SINGOLEДокумент6 страницFlyer Manuale - CON WATERMARK PAGINE SINGOLEjscmtОценок пока нет
- To The Owner / President / CeoДокумент2 страницыTo The Owner / President / CeoChriestal SorianoОценок пока нет
- CoP - 6.0 - Emergency Management RequirementsДокумент25 страницCoP - 6.0 - Emergency Management RequirementsAnonymous y1pIqcОценок пока нет
- Common OPCRF Contents For 2021 2022 FINALE 2Документ21 страницаCommon OPCRF Contents For 2021 2022 FINALE 2JENNIFER FONTANILLA100% (30)
- Karmex 80df Diuron MsdsДокумент9 страницKarmex 80df Diuron MsdsSouth Santee Aquaculture100% (1)
- A.2 de - La - Victoria - v. - Commission - On - Elections20210424-12-18iwrdДокумент6 страницA.2 de - La - Victoria - v. - Commission - On - Elections20210424-12-18iwrdCharisse SarateОценок пока нет
- IIBA Academic Membership Info-Sheet 2013Документ1 страницаIIBA Academic Membership Info-Sheet 2013civanusОценок пока нет
- Double Inlet Airfoil Fans - AtzafДокумент52 страницыDouble Inlet Airfoil Fans - AtzafDaniel AlonsoОценок пока нет
- Jainithesh - Docx CorrectedДокумент54 страницыJainithesh - Docx CorrectedBala MuruganОценок пока нет
- SyllabusДокумент9 страницSyllabusrr_rroyal550Оценок пока нет
- T&B Detailed Plan: Ceiling LineДокумент1 страницаT&B Detailed Plan: Ceiling LineKuthbert NoceteОценок пока нет
- Emco - Unimat 3 - Unimat 4 LathesДокумент23 страницыEmco - Unimat 3 - Unimat 4 LathesEnrique LueraОценок пока нет
- Omae2008 57495Документ6 страницOmae2008 57495Vinicius Cantarino CurcinoОценок пока нет
- Pharaoh TextДокумент143 страницыPharaoh Textanon_31362848Оценок пока нет
- Media SchedulingДокумент4 страницыMedia SchedulingShreyansh PriyamОценок пока нет
- Cinnamon Peelers in Sri Lanka: Shifting Labour Process and Reformation of Identity Post-1977Документ8 страницCinnamon Peelers in Sri Lanka: Shifting Labour Process and Reformation of Identity Post-1977Social Scientists' AssociationОценок пока нет
- Freqinv 3g3fv Ds 01oct2000Документ20 страницFreqinv 3g3fv Ds 01oct2000Mohd Abu AjajОценок пока нет
- 1 Ton Per Hour Electrode Production LineДокумент7 страниц1 Ton Per Hour Electrode Production LineMohamed AdelОценок пока нет
- Key Features of A Company 1. Artificial PersonДокумент19 страницKey Features of A Company 1. Artificial PersonVijayaragavan MОценок пока нет
- Kit 2: Essential COVID-19 WASH in SchoolДокумент8 страницKit 2: Essential COVID-19 WASH in SchooltamanimoОценок пока нет
- Occupational Therapy in Mental HealthДокумент16 страницOccupational Therapy in Mental HealthjethasОценок пока нет
- Company Law Handout 3Документ10 страницCompany Law Handout 3nicoleclleeОценок пока нет
- Nguyen Dang Bao Tran - s3801633 - Assignment 1 Business Report - BAFI3184 Business FinanceДокумент14 страницNguyen Dang Bao Tran - s3801633 - Assignment 1 Business Report - BAFI3184 Business FinanceNgọc MaiОценок пока нет
- Computerized AccountingДокумент14 страницComputerized Accountinglayyah2013Оценок пока нет
- Tle 9 Module 1 Final (Genyo)Документ7 страницTle 9 Module 1 Final (Genyo)MrRightОценок пока нет
- Man Machine Interface SafetyДокумент9 страницMan Machine Interface SafetyVidyesh Viswanathan NairОценок пока нет
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedОт EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedРейтинг: 5 из 5 звезд5/5 (1)
- The Laws of Thermodynamics: A Very Short IntroductionОт EverandThe Laws of Thermodynamics: A Very Short IntroductionРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОт EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsОценок пока нет
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseОт EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseРейтинг: 4.5 из 5 звезд4.5/5 (51)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CОт EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CОценок пока нет
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Handbook of Mechanical and Materials EngineeringОт EverandHandbook of Mechanical and Materials EngineeringРейтинг: 5 из 5 звезд5/5 (4)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsОт EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsОценок пока нет
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchОт EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchРейтинг: 4 из 5 звезд4/5 (10)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideОт Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideРейтинг: 3.5 из 5 звезд3.5/5 (7)
- The Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsОт EverandThe Art of Welding: Featuring Ryan Friedlinghaus of West Coast CustomsОценок пока нет
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyОт EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyРейтинг: 5 из 5 звезд5/5 (1)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОт EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsОценок пока нет
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersОт EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersРейтинг: 4 из 5 звезд4/5 (13)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionОт EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AОт EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AОценок пока нет
- Airplane Flying Handbook: FAA-H-8083-3C (2024)От EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Рейтинг: 4 из 5 звезд4/5 (12)
- The Galactic Federation: Discovering the Unknown Can Be Stranger Than FictionОт EverandThe Galactic Federation: Discovering the Unknown Can Be Stranger Than FictionОценок пока нет
- Practical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansОт EverandPractical Hydraulic Systems: Operation and Troubleshooting for Engineers and TechniciansРейтинг: 4 из 5 звезд4/5 (8)