Вам также может понравиться
- Last PDF of Project ReportДокумент18 страницLast PDF of Project ReportRAVINA MANGAL100% (1)
- Design, Modelling and Implementation of Interleaved Boost DC-DC ConverterДокумент13 страницDesign, Modelling and Implementation of Interleaved Boost DC-DC ConverterInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- State Space Modeling of Buck Boost ConverterДокумент4 страницыState Space Modeling of Buck Boost ConverterZonun sangaОценок пока нет
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesДокумент7 страницTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Slup 129Документ11 страницSlup 129Sameer NandanОценок пока нет
- Low Power Boost Converter For Portable Applications by Eddy Wells and Mark JordanДокумент9 страницLow Power Boost Converter For Portable Applications by Eddy Wells and Mark JordanberbouОценок пока нет
- Buck - Boost ConverterДокумент9 страницBuck - Boost Converterhamza abdo mohamoud100% (1)
- Final ReviewДокумент19 страницFinal ReviewSanyam JainОценок пока нет
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsДокумент12 страницDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeОценок пока нет
- Advanced HVDC TechnologiesДокумент14 страницAdvanced HVDC TechnologiesS Bharadwaj Reddy100% (1)
- Using An Oscilloscope To Observe RectificationДокумент2 страницыUsing An Oscilloscope To Observe RectificationcaressaОценок пока нет
- HPED Assignment 2: DC DrivesДокумент4 страницыHPED Assignment 2: DC DrivesShadОценок пока нет
- Heavy Load Light Load Conversion ReportДокумент41 страницаHeavy Load Light Load Conversion ReportSanjivee SachinОценок пока нет
- Generating 50Hz PWM Using PIC16F877AДокумент2 страницыGenerating 50Hz PWM Using PIC16F877AZarko DacevicОценок пока нет
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationДокумент17 страницStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalОценок пока нет
- Dual Slope ADCДокумент3 страницыDual Slope ADCHero HeroОценок пока нет
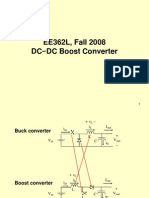
- DC-DC BoostДокумент21 страницаDC-DC BoostvinaykumaarОценок пока нет
- SLUP079Документ46 страницSLUP079bookreader1968Оценок пока нет
- Double Frequency Buck ConverterДокумент36 страницDouble Frequency Buck ConverterSanthosh Guduru100% (1)
- Design and Control of A Buck-Boost DC-DC Power ConverterДокумент65 страницDesign and Control of A Buck-Boost DC-DC Power ConverterMurad Lansa Abdul Khader100% (1)
- A Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsДокумент12 страницA Modified SEPIC Converter For High Power Factor Rectifier and Universal Input Voltage ApplicationsBritto TigerОценок пока нет
- JSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTДокумент7 страницJSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTvivek5110% (1)
- Electrokinetics Course 2010Документ16 страницElectrokinetics Course 2010Stefan StrutiОценок пока нет
- Chapter OneДокумент28 страницChapter OneObafemi Samuel0% (1)
- 1.1 Introduction To Buck ConverterДокумент44 страницы1.1 Introduction To Buck Converterapi-19810277Оценок пока нет
- Two-Stage H-Bridge Transformer Coupled DC-DC Converter With Zero Voltage SwitchingДокумент8 страницTwo-Stage H-Bridge Transformer Coupled DC-DC Converter With Zero Voltage SwitchingRakeshconclaveОценок пока нет
- Lecture 1Документ93 страницыLecture 1ClasesОценок пока нет
- Major ReportДокумент43 страницыMajor ReportPrashant BaliaОценок пока нет
- EE309 Notes 07 PDFДокумент4 страницыEE309 Notes 07 PDFbals123456100% (1)
- Chap4-Buck Boost and FlybackДокумент29 страницChap4-Buck Boost and FlybackArchit BaglaОценок пока нет
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Документ14 страницWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJIОценок пока нет
- Particle Swarm Optimization: Function, Which Maps The Search Space To The Function Space. Since A Function Has Only OneДокумент5 страницParticle Swarm Optimization: Function, Which Maps The Search Space To The Function Space. Since A Function Has Only OneMeltem YaktubayОценок пока нет
- FTF Aut f0234Документ38 страницFTF Aut f0234vishiwizardОценок пока нет
- Isolation Transformers Reduce Drive Neutral Point VoltageДокумент5 страницIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111Оценок пока нет
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurДокумент6 страницOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraОценок пока нет
- Mathematical Modelling of Buck ConverterДокумент4 страницыMathematical Modelling of Buck ConverterEditor IJRITCCОценок пока нет
- The Phase Control Circuit The TC787Документ10 страницThe Phase Control Circuit The TC787nansusanОценок пока нет
- Resistance, Impedance and Other IssuesДокумент12 страницResistance, Impedance and Other Issuesraoultrifan7560Оценок пока нет
- ComparatorДокумент42 страницыComparatoramta1Оценок пока нет
- HCNR200 Application NoteДокумент10 страницHCNR200 Application NoteLogan JohnsonОценок пока нет
- Z Source InverterДокумент16 страницZ Source InverterpradeepagrahariОценок пока нет
- 23 04 10 Electronic Variable Speed DrivesДокумент7 страниц23 04 10 Electronic Variable Speed Drivesyxp2237Оценок пока нет
- 8.buck Boost ConverterДокумент5 страниц8.buck Boost Convertermohanrajgupta19Оценок пока нет
- Tahmid's Blog - AC Power Control With Thyristor - Phase Angle Control Using Triac With PIC16F877AДокумент7 страницTahmid's Blog - AC Power Control With Thyristor - Phase Angle Control Using Triac With PIC16F877ANhân TâmОценок пока нет
- Transformer - NT PDFДокумент108 страницTransformer - NT PDFReshab Sahoo100% (1)
- Sepic Converter Based DC Motor Speed ControlДокумент18 страницSepic Converter Based DC Motor Speed ControlCrispОценок пока нет
- Photodiode vs Phototransistor: Key Differences (39Документ5 страницPhotodiode vs Phototransistor: Key Differences (39CladyОценок пока нет
- MM3000 V SERIES EDUCATION TRAINING SYSTEMДокумент82 страницыMM3000 V SERIES EDUCATION TRAINING SYSTEMTấn Việt NguyễnОценок пока нет
- SEPIC ConverterДокумент16 страницSEPIC ConverterDina GaranОценок пока нет
- Power Rectifier ASIC ControllerДокумент5 страницPower Rectifier ASIC ControllerQuang TaОценок пока нет
- ARDUINO SPWM SINE INVERTER PROJECT GUIDEДокумент5 страницARDUINO SPWM SINE INVERTER PROJECT GUIDEmaurilioctbaОценок пока нет
- Y11 Electricity WK 11Документ45 страницY11 Electricity WK 11Ololade OlaleyeОценок пока нет
- BLDC Sinusoidal ControlДокумент6 страницBLDC Sinusoidal ControlOctavian MîrţiОценок пока нет
- CHAPTER 2 TransformersДокумент70 страницCHAPTER 2 TransformersTom100% (1)
- Manual Amptron Ai205Документ3 страницыManual Amptron Ai205OdirNtanОценок пока нет
- Self Oscillating Flyback ConverterДокумент7 страницSelf Oscillating Flyback ConverterNaren DranОценок пока нет
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- 12 - L-24 (DK&SSG) (Pe) ( (Ee) Nptel)Документ1 страница12 - L-24 (DK&SSG) (Pe) ( (Ee) Nptel)CharkОценок пока нет
- DC-DC Converters PDFДокумент7 страницDC-DC Converters PDFRidaОценок пока нет
- SEPIC Converter: A Modified Boost-Buck DC-DC ConverterДокумент15 страницSEPIC Converter: A Modified Boost-Buck DC-DC ConverterAbhi NáyОценок пока нет
- QS World University Rankings 2019 - Top UniversitiesДокумент95 страницQS World University Rankings 2019 - Top UniversitiespugazhendiraОценок пока нет
- Control Engineering Lecture ReviewДокумент35 страницControl Engineering Lecture ReviewpugazhendiraОценок пока нет
- Unit 1 PDFДокумент15 страницUnit 1 PDFpugazhendiraОценок пока нет
- MHRD ThrustДокумент3 страницыMHRD ThrustSandip MoreОценок пока нет
- EE6005 Power Quality Sem ViiiДокумент2 страницыEE6005 Power Quality Sem ViiipugazhendiraОценок пока нет
- MHRD RNDДокумент4 страницыMHRD RNDSandip MoreОценок пока нет
- Ee2352 Solid State Drives SyllabusДокумент1 страницаEe2352 Solid State Drives SyllabuskgurumoorthiОценок пока нет
- Control Engineering Lecture ReviewДокумент35 страницControl Engineering Lecture ReviewpugazhendiraОценок пока нет
- Intro To MatlabДокумент31 страницаIntro To MatlabpugazhendiraОценок пока нет
- What Are The Three Types of Speed ControlДокумент5 страницWhat Are The Three Types of Speed ControlpugazhendiraОценок пока нет
- MHRD Brainstorming Meeting July 4 2014 Best DPR Modified Proposal For National Mission On Teacher Professional Development Submitted To MHRD July 2014Документ36 страницMHRD Brainstorming Meeting July 4 2014 Best DPR Modified Proposal For National Mission On Teacher Professional Development Submitted To MHRD July 2014pugazhendiraОценок пока нет
- 4drives Lehtla PDFДокумент21 страница4drives Lehtla PDFdennypolariszОценок пока нет
- L-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlДокумент10 страницL-12 (SS) (Ia&c) ( (Ee) Nptel) - P-I-D ControlRaymond EsmeraldaОценок пока нет
- DC Motor Transfer Functions ExplainedДокумент4 страницыDC Motor Transfer Functions ExplainedKareem AbouelwafaОценок пока нет
- Introduction To Electric DrivesДокумент21 страницаIntroduction To Electric DrivesrajfabОценок пока нет
- MHRD Brainstorming Meeting July 4 2014 Best DPR Modified Proposal For National Mission On Teacher Professional Development Submitted To MHRD July 2014Документ36 страницMHRD Brainstorming Meeting July 4 2014 Best DPR Modified Proposal For National Mission On Teacher Professional Development Submitted To MHRD July 2014pugazhendiraОценок пока нет
- Solid State Drives 2 MarksДокумент9 страницSolid State Drives 2 MarksskrtamilОценок пока нет
- SSD Dec13 R8Документ2 страницыSSD Dec13 R8pugazhendiraОценок пока нет
- EE 1351 Solid State Drives UNIT 1 - Drive CharacteristicsДокумент1 страницаEE 1351 Solid State Drives UNIT 1 - Drive CharacteristicspugazhendiraОценок пока нет
- 2 Marks (Questions & Answers) : Geared Coupling Power SupplyДокумент5 страниц2 Marks (Questions & Answers) : Geared Coupling Power SupplypugazhendiraОценок пока нет
- Passport Application Form GuideДокумент2 страницыPassport Application Form GuidePhani BhupathirajuОценок пока нет
- Unit I V 2 Mark Question Answer 16 Mark QuestionsДокумент23 страницыUnit I V 2 Mark Question Answer 16 Mark QuestionspugazhendiraОценок пока нет
- Circuit Analysis II With MATLAB - Steven T. KarrisДокумент501 страницаCircuit Analysis II With MATLAB - Steven T. Karriscursedpoetic100% (1)
- EE 1351 Solid State Drives UNIT 1 - Drive CharacteristicsДокумент1 страницаEE 1351 Solid State Drives UNIT 1 - Drive CharacteristicspugazhendiraОценок пока нет
- Power PDFДокумент14 страницPower PDFpugazhendiraОценок пока нет
- Circuit Analysis I With MATLABДокумент46 страницCircuit Analysis I With MATLABsalemabu9Оценок пока нет
- Stepper Motor.Документ172 страницыStepper Motor.pugazhendira50% (2)
- Cri 1Документ20 страницCri 1pugazhendiraОценок пока нет
- Strain Gage: Measurement and Data AcquisitionДокумент10 страницStrain Gage: Measurement and Data Acquisitionl33laprasadОценок пока нет
- Data Extraction From Planning Area To Backup Info CubeДокумент10 страницData Extraction From Planning Area To Backup Info CubeHari KrishnaОценок пока нет
- INTRODUCTIONДокумент35 страницINTRODUCTIONAmit HОценок пока нет
- MediNotes Conversion Steps For VARsДокумент9 страницMediNotes Conversion Steps For VARsMikeОценок пока нет
- LED User's ManualДокумент13 страницLED User's ManualCristiОценок пока нет
- March 2018 Fundamental IT Engineer Examination (Afternoon)Документ34 страницыMarch 2018 Fundamental IT Engineer Examination (Afternoon)Denz TajoОценок пока нет
- ResultsДокумент5 страницResultsCHEATINGBASTARDОценок пока нет
- CounterACT Console User Manual 7.0.0 PDFДокумент763 страницыCounterACT Console User Manual 7.0.0 PDFlazarusОценок пока нет
- Create A Social Network With SocialGOДокумент7 страницCreate A Social Network With SocialGOmodemlooperОценок пока нет
- Problems On Poisson DistributionДокумент4 страницыProblems On Poisson DistributionMomanyi IvyОценок пока нет
- PAD FOUNDATION DESIGN To BS 81101997Документ15 страницPAD FOUNDATION DESIGN To BS 81101997Carlos Valverde Portilla100% (1)
- Commentz-Walter: Any Better Than Aho-Corasick For Peptide Identification?Документ5 страницCommentz-Walter: Any Better Than Aho-Corasick For Peptide Identification?White Globe Publications (IJORCS)Оценок пока нет
- Geometric SeriesДокумент21 страницаGeometric SeriesRoszelan Majid50% (2)
- Purchasing Doc Release With Multiple CurrenciesДокумент8 страницPurchasing Doc Release With Multiple CurrenciesBalanathan VirupasanОценок пока нет
- Managing Government Records Module 1 Benefits ARCS ORCSДокумент4 страницыManaging Government Records Module 1 Benefits ARCS ORCSAndrea ManaloОценок пока нет
- OPC UA Part 1 - Overview and Concepts 1.03 SpecificationДокумент27 страницOPC UA Part 1 - Overview and Concepts 1.03 SpecificationKanenas KanenasОценок пока нет
- Introduction to Oracle Data IntegratorДокумент14 страницIntroduction to Oracle Data IntegratorSuresh grОценок пока нет
- F2y DatabaseДокумент28 страницF2y Databaseapi-272851576Оценок пока нет
- Keypoints Algebra 1 AДокумент3 страницыKeypoints Algebra 1 AtnezkiОценок пока нет
- HP IMC Network Traffic Analyzer (NTA) Software ModuleДокумент4 страницыHP IMC Network Traffic Analyzer (NTA) Software Modulescrib_nokОценок пока нет
- Vamsi Krishna Myalapalli ResumeДокумент2 страницыVamsi Krishna Myalapalli ResumeVamsi KrishnaОценок пока нет
- TC500-550 User ManualДокумент107 страницTC500-550 User ManualZeus Holguín MartínezОценок пока нет
- Scientist ProjectДокумент1 страницаScientist ProjectEamon BarkhordarianОценок пока нет
- WorldSpan - 9I0B Advanced Worldspan SyllabusДокумент10 страницWorldSpan - 9I0B Advanced Worldspan SyllabusAlexandra NicОценок пока нет
- An Overview of P-Delta AnalysisДокумент8 страницAn Overview of P-Delta AnalysisMuhammad Saqib Abrar100% (1)
- 22 Service Manual - Gateway Lt21Документ178 страниц22 Service Manual - Gateway Lt21Soporte Tecnico Buenos AiresОценок пока нет
- DsfssafaДокумент4 страницыDsfssafaGasОценок пока нет
- Acceptable Quality LimitДокумент5 страницAcceptable Quality LimitGAURAV SHARMAОценок пока нет
- Idm CrackДокумент34 страницыIdm CracktilalmansoorОценок пока нет
- Sap HR FaqДокумент36 страницSap HR FaqAnonymous 5mSMeP2jОценок пока нет
- CS 253 Binary Search Trees ChapterДокумент28 страницCS 253 Binary Search Trees ChapterMuhammed Abdel HamidОценок пока нет