Вам также может понравиться
- The Foil Specialist's 48 Gauge Polyester FilmДокумент1 страницаThe Foil Specialist's 48 Gauge Polyester FilmmerrickОценок пока нет
- Linear Motors Supplement PDFДокумент13 страницLinear Motors Supplement PDFAnonymous c1wk4uL9Оценок пока нет
- Tool Part 3Документ1 страницаTool Part 3merrickОценок пока нет
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsДокумент33 страницыWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsmerrickОценок пока нет
- Loudspeaker nonlinearities cause distortion and dc offsetДокумент1 страницаLoudspeaker nonlinearities cause distortion and dc offsetIulianCioarcaОценок пока нет
- CU 6 OHM VC PATTERN AssemblyДокумент1 страницаCU 6 OHM VC PATTERN AssemblymerrickОценок пока нет
- Winding Jig Set Assembly-ExplodedДокумент1 страницаWinding Jig Set Assembly-ExplodedmerrickОценок пока нет
- Adhesives Epoxy Cements 50-53Документ7 страницAdhesives Epoxy Cements 50-53merrickОценок пока нет
- Cu-04x8T 4ohm AssemblyДокумент1 страницаCu-04x8T 4ohm AssemblymerrickОценок пока нет
- Artemis Q32015 Volatility and Prisoners DilemmaДокумент52 страницыArtemis Q32015 Volatility and Prisoners Dilemmalcmgroupe100% (1)
- BGF 46166 18 4 003Документ7 страницBGF 46166 18 4 003merrickОценок пока нет
- Assessing Radiated Sound in D Space Fundamentals Applications MeasurementДокумент1 страницаAssessing Radiated Sound in D Space Fundamentals Applications MeasurementmerrickОценок пока нет
- Urinalysis and Kidney Disease: What You Need To KnowДокумент16 страницUrinalysis and Kidney Disease: What You Need To KnowBayu Segara HokiОценок пока нет
- THE PATH AHEAD: INTERVENTION FOR THE KIDNEY DYSFUNCTION EPIDEMICДокумент5 страницTHE PATH AHEAD: INTERVENTION FOR THE KIDNEY DYSFUNCTION EPIDEMICmerrickОценок пока нет
- Measuring Loudspeaker Cone Vibration FundamentalsДокумент1 страницаMeasuring Loudspeaker Cone Vibration FundamentalsmerrickОценок пока нет
- Acoustical Reality: by Josef W. MangerДокумент11 страницAcoustical Reality: by Josef W. MangermerrickОценок пока нет
- 201905271403loudspeaker 100 Year AniversaryДокумент120 страниц201905271403loudspeaker 100 Year AniversarymerrickОценок пока нет
- THE PATH AHEAD: INTERVENTION FOR THE KIDNEY DYSFUNCTION EPIDEMICДокумент5 страницTHE PATH AHEAD: INTERVENTION FOR THE KIDNEY DYSFUNCTION EPIDEMICmerrickОценок пока нет
- Japplphysiol 00683 2005Документ9 страницJapplphysiol 00683 2005merrickОценок пока нет
- Next Generation Tedlar PVF Film For Photovoltaic Module BacksheetsДокумент27 страницNext Generation Tedlar PVF Film For Photovoltaic Module BacksheetsmerrickОценок пока нет
- Mems Speakers: Achelous Ut-P 2016 - DatasheetДокумент15 страницMems Speakers: Achelous Ut-P 2016 - DatasheetmerrickОценок пока нет
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsДокумент18 страницWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsmerrickОценок пока нет
- Ars 2014 6158Документ13 страницArs 2014 6158merrickОценок пока нет
- Live A Tiny Giant Free Lifestyle - Learn How Living A Tiny Lifestyle Can AllowinДокумент47 страницLive A Tiny Giant Free Lifestyle - Learn How Living A Tiny Lifestyle Can Allowinmerrick0% (1)
- Effect of Intermittent Fasting and Refeeding On Insulin Action in Healthy MenДокумент9 страницEffect of Intermittent Fasting and Refeeding On Insulin Action in Healthy Mendgh3Оценок пока нет
- Attributes of Linear Phase LoudspeakersДокумент30 страницAttributes of Linear Phase LoudspeakersmerrickОценок пока нет
- Who Own The Nations Rental PropertiesДокумент2 страницыWho Own The Nations Rental PropertiesmerrickОценок пока нет
- AES - New Transducer Technology a.R.T. - Evolution of The Air Motion Transformer PrincipleДокумент11 страницAES - New Transducer Technology a.R.T. - Evolution of The Air Motion Transformer PrincipleWalid ZiadeОценок пока нет
- Comparison of Modal Parameters of Loudsp PDFДокумент11 страницComparison of Modal Parameters of Loudsp PDFmerrickОценок пока нет
- WelcomeДокумент5 страницWelcomeCatОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Heui PDFДокумент56 страницHeui PDFGerman Ramos German Ramos100% (5)
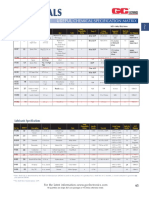
- Ficha Técnica - Titan 1000 AE (Inglés)Документ2 страницыFicha Técnica - Titan 1000 AE (Inglés)Pedro Ramos PAchecoОценок пока нет
- Journal of Physics EconomicsДокумент6 страницJournal of Physics EconomicsmauudyОценок пока нет
- SNP Tanker ReportДокумент3 страницыSNP Tanker ReportfikrifadzalОценок пока нет
- Aermec WRL 026-161HДокумент6 страницAermec WRL 026-161HMilan PizdunОценок пока нет
- 72cell Grand SilverДокумент2 страницы72cell Grand SilverManu MittalОценок пока нет
- Optimal Energy Management and Sizing of A Dual Motor-Driven Electric PowertrainДокумент12 страницOptimal Energy Management and Sizing of A Dual Motor-Driven Electric PowertrainsuneelnitrОценок пока нет
- Cable ColorДокумент4 страницыCable ColorNghia Huynh Ngoc0% (1)
- Busduct PDFДокумент7 страницBusduct PDFrohith87nairОценок пока нет
- Serdi 4.5Документ4 страницыSerdi 4.5Yeam_90Оценок пока нет
- Engg Chemistry R13 Model Question PapersДокумент4 страницыEngg Chemistry R13 Model Question PapersBell P PedОценок пока нет
- Alan Electronics' Story of Quality, Consistency and ReliabilityДокумент6 страницAlan Electronics' Story of Quality, Consistency and Reliabilitysathishsutharsan87Оценок пока нет
- Preparation of A Feasibility Study For NPPДокумент143 страницыPreparation of A Feasibility Study For NPPIrfan YogaОценок пока нет
- Light Energy Lesson Plan: Students Will Students Will Describe HowДокумент3 страницыLight Energy Lesson Plan: Students Will Students Will Describe HowolamhenОценок пока нет
- Physics: Pearson Edexcel GCEДокумент24 страницыPhysics: Pearson Edexcel GCERabia HasanОценок пока нет
- HONOMOBO Canada Email Package 2016-June-1 PG 1 / 7Документ9 страницHONOMOBO Canada Email Package 2016-June-1 PG 1 / 7Daniel StaveОценок пока нет
- Solar Thermo-Mechanical PowerДокумент2 страницыSolar Thermo-Mechanical PowerROBINSON PRADO VILLEGASОценок пока нет
- Hotel Casino AnalysisДокумент65 страницHotel Casino AnalysisLaoismanОценок пока нет
- Swartland SDFДокумент68 страницSwartland SDFAerial ChenОценок пока нет
- Micra Kv4 Kv6Документ4 страницыMicra Kv4 Kv6Mohamed Anouar BidaОценок пока нет
- Instrumentation & Control Cable ScheduleДокумент53 страницыInstrumentation & Control Cable ScheduleAhmad DagamsehОценок пока нет
- 10.-EPRI-NMAC - HVAC Testing, Adjunsting and Balancing Guideline PDFДокумент224 страницы10.-EPRI-NMAC - HVAC Testing, Adjunsting and Balancing Guideline PDFaldeanucuОценок пока нет
- Yanmar 3TNV76-DWL Engine Parts CatalogДокумент20 страницYanmar 3TNV76-DWL Engine Parts CatalogDarryl CareyОценок пока нет
- Gel Content & Peel Test: Benjamin Lippke, Romain PénidonДокумент14 страницGel Content & Peel Test: Benjamin Lippke, Romain PénidonKarthikeyanKarthikОценок пока нет
- Whirlpool Europe Service Manual for GSI 6587 IN DishwasherДокумент17 страницWhirlpool Europe Service Manual for GSI 6587 IN DishwasherDEKOEBERОценок пока нет
- AT S C55/65: Step 4 Installation and CommissioningДокумент2 страницыAT S C55/65: Step 4 Installation and CommissioningVENTAS AGROPOCULONОценок пока нет
- Steam Generator HДокумент2 страницыSteam Generator HNoor NoorОценок пока нет
- Everything about steam condensersДокумент17 страницEverything about steam condensersASHOKОценок пока нет
- Thyristor 3 Phase InverterДокумент31 страницаThyristor 3 Phase InverterjorgeОценок пока нет
- Steam Displacement - Kern River Field PDFДокумент7 страницSteam Displacement - Kern River Field PDFSusan Li HBОценок пока нет