Вам также может понравиться
- Annex A Step by Step Guide For ISO 9001 2015 NG FG AGДокумент39 страницAnnex A Step by Step Guide For ISO 9001 2015 NG FG AGRt Saragih100% (1)
- Changing IGBTДокумент7 страницChanging IGBTdhruvОценок пока нет
- DC To DC Converters and Its Application For Railway System-A ReviewДокумент9 страницDC To DC Converters and Its Application For Railway System-A ReviewdhruvОценок пока нет
- Annex A Step by Step Guide For ISO 9001 2015 NG FG AGДокумент39 страницAnnex A Step by Step Guide For ISO 9001 2015 NG FG AGRt Saragih100% (1)
- AH Series CatalogДокумент2 страницыAH Series CatalogdhruvОценок пока нет
- Diffrent CapacitorДокумент4 страницыDiffrent CapacitordhruvОценок пока нет
- Compact NS630b To 1600 (Fixed Version) : ConnectionДокумент1 страницаCompact NS630b To 1600 (Fixed Version) : ConnectiondhruvОценок пока нет
- EMC Design of IGBT Model PDFДокумент20 страницEMC Design of IGBT Model PDFKen OhОценок пока нет
- Calculate Cable Size and Voltage DropДокумент4 страницыCalculate Cable Size and Voltage DropdhruvОценок пока нет
- Earthing Resistance Value: Size of Capacitor For Power Factor CorrectionДокумент17 страницEarthing Resistance Value: Size of Capacitor For Power Factor Correctiondhruv100% (2)
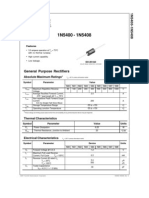
- General Purpose Rectifiers: Absolute Maximum RatingsДокумент3 страницыGeneral Purpose Rectifiers: Absolute Maximum Ratingsapi-3749263Оценок пока нет
- Calculate Size of ContactorДокумент3 страницыCalculate Size of ContactordhruvОценок пока нет
- Earthing CalculationДокумент4 страницыEarthing Calculationanandpurush100% (1)
- 5 - AC Motor Starter PDFДокумент10 страниц5 - AC Motor Starter PDFPrem KumarОценок пока нет
- Origin of Harmonics - Electrical Installation Guide PDFДокумент3 страницыOrigin of Harmonics - Electrical Installation Guide PDFdhruvОценок пока нет
- Polytechnic Hub: Electrical Slip RingsДокумент3 страницыPolytechnic Hub: Electrical Slip RingsdhruvОценок пока нет
- Usefulness of The Various Indicators of Harmonic Distortion: From Electrical Installation GuideДокумент2 страницыUsefulness of The Various Indicators of Harmonic Distortion: From Electrical Installation GuidedhruvОценок пока нет
- Harmonic Filtering - Electrical Installation GuideДокумент4 страницыHarmonic Filtering - Electrical Installation GuidedhruvОценок пока нет
- Experimental Investigation On The Behaviour of IGBT at Short Circuit During On StateДокумент6 страницExperimental Investigation On The Behaviour of IGBT at Short Circuit During On StatedhruvОценок пока нет
- R.M.S. Values - Electrical Installation Guide PDFДокумент1 страницаR.M.S. Values - Electrical Installation Guide PDFdhruvОценок пока нет
- Basic Solutions To Mitigate Harmonics - Electrical Installation GuideДокумент3 страницыBasic Solutions To Mitigate Harmonics - Electrical Installation GuidedhruvОценок пока нет
- Design of Igbt Based LLC Resonant InverterДокумент7 страницDesign of Igbt Based LLC Resonant InverterdhruvОценок пока нет
- Origin of Harmonics - Electrical Installation Guide PDFДокумент3 страницыOrigin of Harmonics - Electrical Installation Guide PDFdhruvОценок пока нет
- HV Igbt Includes Active ClampingДокумент2 страницыHV Igbt Includes Active ClampingdhruvОценок пока нет
- Selection of A Circuit-Breaker - Electrical Installation GuideДокумент11 страницSelection of A Circuit-Breaker - Electrical Installation GuidedhruvОценок пока нет
- Isc at The Receiving End of A Feeder As A Function of The Isc at Its Sending End - Electrical Installation GuideДокумент3 страницыIsc at The Receiving End of A Feeder As A Function of The Isc at Its Sending End - Electrical Installation GuidedhruvОценок пока нет
- Current Source LLC InverterДокумент6 страницCurrent Source LLC InverterdhruvОценок пока нет
- Hard Switching Behaviour of MOSFETs and IGBTsДокумент6 страницHard Switching Behaviour of MOSFETs and IGBTsdhruvОценок пока нет
- Standards and Description of Circuit-Breakers: From Electrical Installation GuideДокумент3 страницыStandards and Description of Circuit-Breakers: From Electrical Installation GuidedhruvОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cargo Calculations - Tanker WorkДокумент24 страницыCargo Calculations - Tanker WorkVasil Raykov100% (1)
- 6 Orthogonal and Oblique CuttingДокумент12 страниц6 Orthogonal and Oblique CuttingPRASAD326100% (6)
- Introducing Rheology - Sep 2017Документ34 страницыIntroducing Rheology - Sep 2017Daniel Perez ColmenaresОценок пока нет
- Convection Heat TransferДокумент49 страницConvection Heat TransferAli almansouriОценок пока нет
- Written Work3Документ2 страницыWritten Work3John Robert Dayrit VenturaОценок пока нет
- Fan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q PpowДокумент3 страницыFan Laws: Table 1 Fan Laws Parameters Variable ‘n' Speed Variable ‘ρ' Density Variable ‘d' Impeller Diameter p Q Ppowgeetikag_23Оценок пока нет
- Savelyev I.V.-Physics - A General Course. Volume III (1989) PDFДокумент159 страницSavelyev I.V.-Physics - A General Course. Volume III (1989) PDFSuper OMG GamerОценок пока нет
- My ThesisДокумент10 страницMy ThesisHundaol TesfayeОценок пока нет
- Evaporation-Rate For Swimming PoolДокумент5 страницEvaporation-Rate For Swimming PoolNelson VargasОценок пока нет
- Centrifugal or Centripetal ForceДокумент3 страницыCentrifugal or Centripetal ForceGianne Karl AlmarinesОценок пока нет
- Richard Shoup and Thomas Etter - The RetroComm Experiment - Using Quantum Randomness To Send A Message Back in TimeДокумент7 страницRichard Shoup and Thomas Etter - The RetroComm Experiment - Using Quantum Randomness To Send A Message Back in TimeCanola_OliveОценок пока нет
- William Liller - Space AstrophysicsДокумент290 страницWilliam Liller - Space Astrophysicsmuhamad dimas arifin a.k.a Ahmd El ArfОценок пока нет
- Tutorials On Bohrs TheoryДокумент2 страницыTutorials On Bohrs TheorySukhwinder Singh GillОценок пока нет
- Chapter 5 Flexural MembersДокумент40 страницChapter 5 Flexural MembersAriel Dela CruzОценок пока нет
- Strength of Materials (HE 306)Документ463 страницыStrength of Materials (HE 306)Anu ParameswaranОценок пока нет
- Wpe ExercisesДокумент11 страницWpe ExercisesjoeОценок пока нет
- Tasnee 1925ASДокумент1 страницаTasnee 1925ASpolymeianОценок пока нет
- Heat and ThermodynamicsДокумент15 страницHeat and ThermodynamicsYasir KhanОценок пока нет
- s10853 011 6219 8 - DensityДокумент7 страницs10853 011 6219 8 - DensityEduardo Fernandez SanchezОценок пока нет
- Past Papers IGCSE 2023 43Документ8 страницPast Papers IGCSE 2023 43David ThydetОценок пока нет
- 2017 Karomi IBPh DДокумент155 страниц2017 Karomi IBPh DGeorge FiliosОценок пока нет
- Chapter 14 Practice Problems Review and AssessmentДокумент42 страницыChapter 14 Practice Problems Review and Assessmentra.yakout85Оценок пока нет
- PCS130 Magnetic Fields 5Документ8 страницPCS130 Magnetic Fields 5Ekan Ahmad100% (1)
- Einstein, String Theory and The FutureДокумент38 страницEinstein, String Theory and The FutureAlexandra100% (1)
- Gas Turbine Performance CalculationДокумент7 страницGas Turbine Performance CalculationAtiqur RahmanОценок пока нет
- 06 PlateTheory 08 VibrationsДокумент6 страниц06 PlateTheory 08 Vibrationsvhj gbhjОценок пока нет
- Chapter 3 Spatial Descriptions and Transformations PDFДокумент33 страницыChapter 3 Spatial Descriptions and Transformations PDFOmar AL JabaiОценок пока нет
- Cheat Sheet SurfaceДокумент2 страницыCheat Sheet SurfaceArchita VОценок пока нет
- Gyroscopic InstrumentsДокумент23 страницыGyroscopic InstrumentsRobin ForbesОценок пока нет
- P-Y Curves Methods - Laterally Loaded PilesДокумент3 страницыP-Y Curves Methods - Laterally Loaded PilesRamanathan GnanasambandamОценок пока нет