Вам также может понравиться
- Modelos de Materiales DispersivosДокумент1 страницаModelos de Materiales DispersivosIsai SantanaОценок пока нет
- Control de Sistemas No Lineales - Sira RamirezДокумент17 страницControl de Sistemas No Lineales - Sira RamirezDiego MV100% (1)
- Tecnicas de MedicionДокумент1 страницаTecnicas de MedicionIsai SantanaОценок пока нет
- Red de Dos PuertosДокумент1 страницаRed de Dos PuertosIsai SantanaОценок пока нет
- 967 2998 1 PB PDFДокумент4 страницы967 2998 1 PB PDFRosaОценок пока нет
- Liebert DatamateДокумент4 страницыLiebert Datamatesergio cruzОценок пока нет
- Matricez Canonicas de ControlabilidadДокумент6 страницMatricez Canonicas de ControlabilidadIsai SantanaОценок пока нет
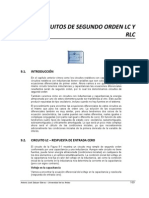
- Circuitos de Segundo Orden RLCДокумент21 страницаCircuitos de Segundo Orden RLCFrancisco Javier Vera TorresОценок пока нет
- Modelos de Materiales DispersivosДокумент1 страницаModelos de Materiales DispersivosIsai SantanaОценок пока нет
- Tipos de InvestigaciónДокумент4 страницыTipos de InvestigaciónRaúl DomínguezОценок пока нет
- 967 2998 1 PB PDFДокумент4 страницы967 2998 1 PB PDFRosaОценок пока нет
- 422 PubДокумент127 страниц422 PubJose Domingo Palomino MartinezОценок пока нет
- Generadores en ParaleloДокумент4 страницыGeneradores en ParaleloIsai SantanaОценок пока нет
- Secuencia FasesДокумент8 страницSecuencia FasesPatricio CaboОценок пока нет
- Transformador CalculosДокумент30 страницTransformador CalculosLuis Angel Montilla TuestaОценок пока нет
- Implementacion FiltrosДокумент47 страницImplementacion Filtrosfesime95Оценок пока нет
- NubesДокумент1 страницаNubesIsai SantanaОценок пока нет
- Estudiode Oscilacionesdepotenciaenel Sistema Elctrico NacionalДокумент47 страницEstudiode Oscilacionesdepotenciaenel Sistema Elctrico NacionalIsai SantanaОценок пока нет
- Linealizacion de SistemasДокумент30 страницLinealizacion de SistemasCristianMartinezОценок пока нет
- LinealznДокумент7 страницLinealznGonzalo CamachoОценок пока нет
- Modelado de Entre HierroДокумент4 страницыModelado de Entre HierroIsai SantanaОценок пока нет
- Subestaciones Electricas (TEORIA)Документ41 страницаSubestaciones Electricas (TEORIA)Dayan ҺệŗŘēŖÂ яŨłż100% (2)
- Circuitos Trifásicos Balanceados y Sus ConexionesДокумент7 страницCircuitos Trifásicos Balanceados y Sus ConexionesAdrianThomson0% (1)
- Perdidas Tecnicas y No Tecnicas de EnergiaДокумент72 страницыPerdidas Tecnicas y No Tecnicas de Energiamario100% (2)
- Secuencia FasesДокумент8 страницSecuencia FasesPatricio CaboОценок пока нет
- 04 Diagrama de BodeДокумент5 страниц04 Diagrama de BodeIsai SantanaОценок пока нет
- Señales y Sistemas 2.1 PDFДокумент336 страницSeñales y Sistemas 2.1 PDFJoaquínCernaDíazОценок пока нет
- Simulacion de FiltrosДокумент3 страницыSimulacion de FiltrosIsai SantanaОценок пока нет
- Mantenimiento ElectricoДокумент10 страницMantenimiento ElectricoTHOMAS AGUSTÍN NUÑEZОценок пока нет
- Grupo01 Pre-Informe LabДокумент8 страницGrupo01 Pre-Informe Labcamilo amayaОценок пока нет
- Alternadores Asincrono PDFДокумент4 страницыAlternadores Asincrono PDFGilberto PantojaОценок пока нет
- Evaluación ElectricidadДокумент9 страницEvaluación ElectricidadCRISTIAN GABRIEL BURGOS ROSALESОценок пока нет
- EETT Eléctricas PTAS Huentelauquen Sur Rev. 0Документ13 страницEETT Eléctricas PTAS Huentelauquen Sur Rev. 0David VeraОценок пока нет
- CONCLUSIÓN y RecomendacionesДокумент2 страницыCONCLUSIÓN y Recomendacionessanti50% (2)
- Temario y Capitulo Regalo Reparando Como Picerno LCD y PlasmaДокумент18 страницTemario y Capitulo Regalo Reparando Como Picerno LCD y PlasmaNevil Mora Montilla100% (2)
- DinamosДокумент8 страницDinamosAnonymous p7CpcxdОценок пока нет
- Uso del osciloscopio virtual en MultisimДокумент22 страницыUso del osciloscopio virtual en MultisimARTURO ALEXANDER YARLAQUE RAMOSОценок пока нет
- Electricidad AplicadaДокумент172 страницыElectricidad AplicadaJair Eviel Barrios Deluquez100% (1)
- 44-IME-Centrales Estaciones y Transporte de EnergiaДокумент7 страниц44-IME-Centrales Estaciones y Transporte de EnergiaNicolás Santiago UgarteОценок пока нет
- Entrenamiento eléctricoДокумент76 страницEntrenamiento eléctricoClaudio AriasОценок пока нет
- Circuitos Simples y Circuitos BásicosДокумент8 страницCircuitos Simples y Circuitos BásicosJuan Leonardo Medina SanchezОценок пока нет
- Magenetismo y ElectromagnetismoДокумент11 страницMagenetismo y ElectromagnetismoAlondra MarlenОценок пока нет
- SEP FundamentosДокумент253 страницыSEP FundamentosRichard ParralesОценок пока нет
- Informe de La PracticaДокумент77 страницInforme de La PracticaJuan del mar GarcíaОценок пока нет
- EE en 2011 388 RB - Informe de Homologacion Angamos - U1Документ45 страницEE en 2011 388 RB - Informe de Homologacion Angamos - U1Rigoberto UrrutiaОценок пока нет
- MAC 2021-2 Corte 1Документ2 страницыMAC 2021-2 Corte 1julian barreraОценок пока нет
- Rev 0. - Boletin Informativo 007 Generadores - PPT 05Документ1 страницаRev 0. - Boletin Informativo 007 Generadores - PPT 05Franciscav TapiaОценок пока нет
- Elaboracion de Expedientes Tecnicos - IДокумент36 страницElaboracion de Expedientes Tecnicos - IEduardo RamirezОценок пока нет
- Lab 4 Fisica 3Документ13 страницLab 4 Fisica 3SAMIRA ISABEL CUEVA BROWNОценок пока нет
- Diferencias Entre DFIG y SCIGДокумент52 страницыDiferencias Entre DFIG y SCIGArevalo DavidОценок пока нет
- Catálogo. Baja Tensión Motores de Aplicación General en Hierro FundidoДокумент24 страницыCatálogo. Baja Tensión Motores de Aplicación General en Hierro FundidosxmxxlОценок пока нет
- Definición de Circuito EléctricoДокумент16 страницDefinición de Circuito EléctricoBenito Alarcon GonzalezОценок пока нет
- Generador de DC Compuesto y SerieДокумент4 страницыGenerador de DC Compuesto y SerieDubanОценок пока нет
- Motor y Generador SincronoДокумент5 страницMotor y Generador Sincronolau_chicuellard50% (2)
- 1 Sistema de Potencia Mecánico y EléctricoДокумент3 страницы1 Sistema de Potencia Mecánico y EléctricoJhonny Rodriguez LuisОценок пока нет
- Apuntes Maquinas ElectricasДокумент36 страницApuntes Maquinas ElectricasArmando Gleetierrez McKynleighОценок пока нет
- Exitatriz Del Generador AsincronoДокумент9 страницExitatriz Del Generador AsincronoХуан ЛуисОценок пока нет