Вам также может понравиться
- Generalized Predictive Control Part II. Extensions and InterpretationsДокумент12 страницGeneralized Predictive Control Part II. Extensions and Interpretationsfiregold2100% (1)
- Lab Manual - EEE 402 - Exp01 July2014Документ7 страницLab Manual - EEE 402 - Exp01 July2014AhammadSifatОценок пока нет
- 012 - Chapter 2 - L10Документ12 страниц012 - Chapter 2 - L10nanduslns07Оценок пока нет
- Cuckoo Search (CS) Algorithm - Matlab CodeДокумент4 страницыCuckoo Search (CS) Algorithm - Matlab CodeGogyОценок пока нет
- PV Lab ReportДокумент6 страницPV Lab ReportBen HeoОценок пока нет
- Lab 591 - B Analysis and Design of CSДокумент2 страницыLab 591 - B Analysis and Design of CSDevine WriterОценок пока нет
- PsoДокумент17 страницPsoKanishka SahniОценок пока нет
- Enhanced Single-Loop Control StrategiesДокумент26 страницEnhanced Single-Loop Control Strategiesmeseret sisay100% (1)
- Quanser Coupled Tanks Modeling and Parameter PDFДокумент7 страницQuanser Coupled Tanks Modeling and Parameter PDFAnonymous rTRz30fОценок пока нет
- Arrow Sensor Guide Digital A4 Apr 25Документ43 страницыArrow Sensor Guide Digital A4 Apr 25Tzouralas TheodorosОценок пока нет
- 4.plasma ReactorsДокумент28 страниц4.plasma Reactors湯晴羽Оценок пока нет
- MCT Question BankДокумент5 страницMCT Question BankKalamchety Ravikumar SrinivasaОценок пока нет
- Temperature Control Using LabviewДокумент5 страницTemperature Control Using LabviewReyyan KhalidОценок пока нет
- Closed Loop Response of Temperature Control SystemДокумент6 страницClosed Loop Response of Temperature Control SystemsjsujiprasadОценок пока нет
- 3.1 Analog MultipliersДокумент17 страниц3.1 Analog MultipliersMarykutty CyriacОценок пока нет
- Solve Ex 2.0Документ6 страницSolve Ex 2.0Omar Abd El-RaoufОценок пока нет
- Fixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaДокумент9 страницFixed-Structure H-Infinity Synthesis With HINFSTRUCT - MATLAB & Simulink - MathWorks IndiaNitish_Katal_9874Оценок пока нет
- Mechanism Final ProjectДокумент14 страницMechanism Final Projectsundari_murali100% (2)
- Dynamic ErrorДокумент7 страницDynamic ErrorSuvra PattanayakОценок пока нет
- Assignment1Документ2 страницыAssignment1Manoj KumarОценок пока нет
- Engineering 4862 Microprocessors: Assignment 2Документ6 страницEngineering 4862 Microprocessors: Assignment 2Ermias MesfinОценок пока нет
- Butterworth Filter Design MATLAB CodeДокумент3 страницыButterworth Filter Design MATLAB CodeKoushik DasОценок пока нет
- Nidhi EM Numerical - Examples - For - TestsДокумент10 страницNidhi EM Numerical - Examples - For - Testsapi-26910047Оценок пока нет
- Answer Key-CHE 4353-Exam 3-Fall 14Документ9 страницAnswer Key-CHE 4353-Exam 3-Fall 14Kalmah3636Оценок пока нет
- Comparison of Different FE Calculation Methods For The Electromagnetic Torque of PM MachinesДокумент8 страницComparison of Different FE Calculation Methods For The Electromagnetic Torque of PM Machinesmlkz_01Оценок пока нет
- Ee215 Lab ReportДокумент16 страницEe215 Lab ReportNguyễn Hữu BáchОценок пока нет
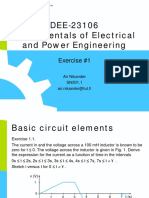
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Документ12 страницDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipОценок пока нет
- Lab 6 LCS 078Документ13 страницLab 6 LCS 078Asad saeedОценок пока нет
- Callendar Van DusenДокумент3 страницыCallendar Van DusenSidnei RodriguesОценок пока нет
- Bioelectrozi 1Документ14 страницBioelectrozi 1Cosmin ComanОценок пока нет
- Process Dynamics and Control, Ch. 24 Solution ManualДокумент27 страницProcess Dynamics and Control, Ch. 24 Solution ManualBen Spearman100% (1)
- Multisim Unsolved Questions BITS PilaniДокумент2 страницыMultisim Unsolved Questions BITS Pilanimanish_genus100% (1)
- 1987 - Generalized Predictive Control - Part I - Clarke PDFДокумент12 страниц1987 - Generalized Predictive Control - Part I - Clarke PDFademargcjuniorОценок пока нет
- Lab Report On ECE 210 Lab1Документ6 страницLab Report On ECE 210 Lab1Joanne Lai100% (1)
- The Effect of DC On The Inductance of A Ferrite CoreДокумент4 страницыThe Effect of DC On The Inductance of A Ferrite CoreAndrei LeleaОценок пока нет
- Section PL7-1 LanguageДокумент27 страницSection PL7-1 LanguageTalyson AlexandreОценок пока нет
- (EE332) (09ECE) (Group13) Report ProjectДокумент23 страницы(EE332) (09ECE) (Group13) Report ProjectNgô ĐạtОценок пока нет
- Numerical Analysis of AC Losses in SuperconductorsДокумент6 страницNumerical Analysis of AC Losses in SuperconductorsRaghbendra TiwariОценок пока нет
- GEE338 Problem Set #4 Compensators and PID PDFДокумент3 страницыGEE338 Problem Set #4 Compensators and PID PDFAkram KhorsheidОценок пока нет
- Process Control TrainerДокумент3 страницыProcess Control TrainerSufyan AzamОценок пока нет
- Electronics Measurements and Instrumentation Ebook & NotesДокумент94 страницыElectronics Measurements and Instrumentation Ebook & NotesGunjan JhaОценок пока нет
- Design of Wind Turbine: December 2015Документ40 страницDesign of Wind Turbine: December 2015Lavanya ChandranОценок пока нет
- DVM 1500 MДокумент9 страницDVM 1500 MHanif Rathore PrinceОценок пока нет
- Torque - Slip Characteristic of A Three - Phase Induction MachineДокумент28 страницTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirОценок пока нет
- Test de RadiadorДокумент10 страницTest de RadiadorOmar Reinoso TigreОценок пока нет
- NonMinimum Phase Control SystemsДокумент5 страницNonMinimum Phase Control SystemsD.ViswanathОценок пока нет
- Nonlinear Predictive Control For The Four-Tanks Plant Flow RegulationДокумент6 страницNonlinear Predictive Control For The Four-Tanks Plant Flow RegulationPhạm Ngọc HuyОценок пока нет
- Literature Review of PID Controller Based On Various Soft Computing TechniquesДокумент4 страницыLiterature Review of PID Controller Based On Various Soft Computing TechniquesEditor IJRITCCОценок пока нет
- ET Lab ManualДокумент52 страницыET Lab Manualcholleti sriram100% (1)
- The Smart Choice of Fluid Control SystemsДокумент25 страницThe Smart Choice of Fluid Control SystemsRobert MarkovskiОценок пока нет
- In Electrical Electronic MeasurementДокумент29 страницIn Electrical Electronic Measurementsiddhartha bharadwajОценок пока нет
- Mwoc Final Lab Manual 28-08-2010Документ77 страницMwoc Final Lab Manual 28-08-2010downloadscribdpdfОценок пока нет
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionОт EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionОценок пока нет
- Major Project Base PaperДокумент6 страницMajor Project Base PaperShiva GaneshОценок пока нет
- An Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveДокумент10 страницAn Efficient Predictive Current Control Strategy For A Four-Level Open-End Winding Induction Motor DriveAbd DawaraОценок пока нет
- Proposal and Implementation of A Novel Perturb and Observe Algorithm Using Embedded Software1.8Документ6 страницProposal and Implementation of A Novel Perturb and Observe Algorithm Using Embedded Software1.8juan sebastianОценок пока нет
- Two Loop Pi ControllerДокумент12 страницTwo Loop Pi ControllerSureshkumar AlagarsamyОценок пока нет
- MPC Yalmip MPTДокумент6 страницMPC Yalmip MPTJules JoeОценок пока нет
- Residential HVACДокумент222 страницыResidential HVACAshokОценок пока нет
- A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control For Quadrotor Agile FlightДокумент16 страницA Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control For Quadrotor Agile FlighttiagopnОценок пока нет
- Feedback Linearization and LQ Based Constrained Predictive ControlДокумент19 страницFeedback Linearization and LQ Based Constrained Predictive ControlTran Van ThucОценок пока нет
- Theory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCДокумент13 страницTheory and Applications of HVAC Control Systems A Review of Model Predictive Control MPCKhuleedShaikhОценок пока нет
- Robot Learning With Implicit RepresentationsДокумент83 страницыRobot Learning With Implicit RepresentationsQinan ZhangОценок пока нет
- 2019-Control of Four Tank System Using Model Predictive ControllerДокумент5 страниц2019-Control of Four Tank System Using Model Predictive ControllerAravindan MohanОценок пока нет
- Process Synthesis and DesignДокумент21 страницаProcess Synthesis and Designkishore dasmunshiОценок пока нет
- 7.1 Model Identification: Bottom Side Temperature Reboiler Valve Position Upper Sidetemperature Reflux Valve PositionДокумент4 страницы7.1 Model Identification: Bottom Side Temperature Reboiler Valve Position Upper Sidetemperature Reflux Valve PositionGarabigОценок пока нет
- Advanced Process Control-HYSYSДокумент27 страницAdvanced Process Control-HYSYSAhmad DeyabОценок пока нет
- Model Predictive Control Approach To Microgrid Operation: Marzuq AjaniДокумент97 страницModel Predictive Control Approach To Microgrid Operation: Marzuq AjaniAYAN TUDUОценок пока нет
- Dynamic Matrix Controller Based On Sliding Mode CoДокумент7 страницDynamic Matrix Controller Based On Sliding Mode CoRenato Fuentealba AravenaОценок пока нет
- Model Based Control of A Yeast Fermentation Bioreactor Using Optimally Designed Artificial Neural NetworksДокумент15 страницModel Based Control of A Yeast Fermentation Bioreactor Using Optimally Designed Artificial Neural NetworksSebastian BayonaОценок пока нет
- Smart Technologies For Oil ProductionДокумент98 страницSmart Technologies For Oil ProductionViorica SîrghiiОценок пока нет
- Autonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingДокумент31 страницаAutonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingGergely HornyakОценок пока нет
- Computing and Systems Technology Division 2018: Pittsburgh, Pennsylvania, USA 28 October - 2 November 2018Документ19 страницComputing and Systems Technology Division 2018: Pittsburgh, Pennsylvania, USA 28 October - 2 November 2018Juan MartinezОценок пока нет
- Deltav Embedded Advanced ControlДокумент108 страницDeltav Embedded Advanced Controltimsar1357Оценок пока нет
- Schwarke Et Al. - 2023 - Curiosity-Driven Learning of Joint Locomotion andДокумент17 страницSchwarke Et Al. - 2023 - Curiosity-Driven Learning of Joint Locomotion andAnonymous o64C7SaZWsОценок пока нет
- EXCEL VBA ProgramingДокумент12 страницEXCEL VBA ProgramingCarlos AndresОценок пока нет
- Modulated Model Predictive Speed Control For PMSM DrivesДокумент6 страницModulated Model Predictive Speed Control For PMSM DrivesLong Vũ VănОценок пока нет
- 2016 December Barcelona Conference ProgramДокумент82 страницы2016 December Barcelona Conference ProgramBahadır AkbalОценок пока нет
- Carlos Gomez Predictive Control For PMSMДокумент135 страницCarlos Gomez Predictive Control For PMSMIbrahimFaroukSolarОценок пока нет
- Adaptive Feedback Control For A Pasteurization ProcessДокумент1 страницаAdaptive Feedback Control For A Pasteurization Processjoshua laraОценок пока нет
- 2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsДокумент13 страниц2018 - A Comparison of Finite Control Set and Continuous Control Set Model Predictive Control Schemes For Speed Control of Induction MotorsjemmyducОценок пока нет
- Model Predictive Control Toolbox™ User's GuideДокумент256 страницModel Predictive Control Toolbox™ User's GuideVictor Colpo NavarreteОценок пока нет
- Robotics 11 00080 v2Документ15 страницRobotics 11 00080 v2Francesco TedescoОценок пока нет
- 1 Linear MPCДокумент139 страниц1 Linear MPCmohammad omarОценок пока нет
- StateOfArtControlEngineering Kosak2014Документ9 страницStateOfArtControlEngineering Kosak2014Susana VieiraОценок пока нет
- 1 Linear MPCДокумент125 страниц1 Linear MPCVignesh RamakrishnanОценок пока нет
- New Developments in Industrial MPC Identification Yucai ZhuДокумент8 страницNew Developments in Industrial MPC Identification Yucai ZhuAlongkorn JaranchonОценок пока нет