Вам также может понравиться
- Readymix Concrete BS EN 206-1Документ66 страницReadymix Concrete BS EN 206-1Ajit Singh Rathore100% (8)
- Surface Tension Transfer (STT) Pipe WeldingДокумент3 страницыSurface Tension Transfer (STT) Pipe WeldingahmedОценок пока нет
- Strip Weld OverlayДокумент24 страницыStrip Weld OverlaymayataОценок пока нет
- Schwarzer Schmarsow - The Emergence of Architectural Space August Schmarsows Theory of RaumgestaltungДокумент15 страницSchwarzer Schmarsow - The Emergence of Architectural Space August Schmarsows Theory of RaumgestaltungDimitra BilliaОценок пока нет
- Design of Torque ArmДокумент16 страницDesign of Torque ArmRonak PanchalОценок пока нет
- Cutting Speed LaserДокумент6 страницCutting Speed LaserSrinivasan KasiОценок пока нет
- Cutter GuideДокумент1 страницаCutter GuideCarlos RamirezОценок пока нет
- 08 PawДокумент30 страниц08 PawAnupam KushwahaОценок пока нет
- The Gently Curled Fingers of Your Guide HandДокумент7 страницThe Gently Curled Fingers of Your Guide HandRuby ann corpuzОценок пока нет
- Heat Treatment of SteelДокумент3 страницыHeat Treatment of SteelKristine ReyesОценок пока нет
- Materials and Qualification Procedures For Ships: Book AДокумент15 страницMaterials and Qualification Procedures For Ships: Book AJavier del AngelОценок пока нет
- SPL - PQR-WPS-SWPS SmawДокумент7 страницSPL - PQR-WPS-SWPS Smawgopuvinu4uОценок пока нет
- KOBE Steel SS Weld Filler Tables and Comparison SMAW GTAW SAW FCAW KWT - SUS - 3edДокумент22 страницыKOBE Steel SS Weld Filler Tables and Comparison SMAW GTAW SAW FCAW KWT - SUS - 3edlram70Оценок пока нет
- SV Engineerings: Work InstructionДокумент5 страницSV Engineerings: Work InstructionPrakash RajОценок пока нет
- Heat Treatment of SteelsДокумент6 страницHeat Treatment of SteelsSrinivas LaishettyОценок пока нет
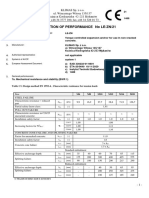
- Declaration of Perormance-Le-ZnДокумент4 страницыDeclaration of Perormance-Le-ZnDavid SeeОценок пока нет
- WI-02 Thermal CuttingДокумент16 страницWI-02 Thermal CuttingPrakash RajОценок пока нет
- Complete Short Circuit CycleДокумент8 страницComplete Short Circuit CycleWilly UioОценок пока нет
- Gtaw and Gmaw Equipment and Supplies: 7.2 Arc Welding Power Sources For GTAWДокумент19 страницGtaw and Gmaw Equipment and Supplies: 7.2 Arc Welding Power Sources For GTAWNachiket MujumdarОценок пока нет
- FG - ASCQ3109 - Welding and Quality Technician - Final - PKG - 01.08.2019 PDFДокумент390 страницFG - ASCQ3109 - Welding and Quality Technician - Final - PKG - 01.08.2019 PDFJim KaliОценок пока нет
- MT Sample ProcedureДокумент7 страницMT Sample ProcedureAgustine SetiawanОценок пока нет
- Electrode CalculationДокумент2 страницыElectrode CalculationKenshin HimuraОценок пока нет
- Gas Metal Arc WeldingДокумент52 страницыGas Metal Arc WeldingBalakumarОценок пока нет
- TIG WeldingДокумент42 страницыTIG WeldingMohammad Sobhan RajabiОценок пока нет
- Wopq Format Asme Qw-360Документ1 страницаWopq Format Asme Qw-360Anonymous S33n8gОценок пока нет
- PIPELINERS LIMITED-Chevron Bangladesh Project Welder Register (Update On Dec, 05. 2020) Welder Test Information Qualified Welder NameДокумент1 страницаPIPELINERS LIMITED-Chevron Bangladesh Project Welder Register (Update On Dec, 05. 2020) Welder Test Information Qualified Welder NameJakir HossainОценок пока нет
- MaterialДокумент1 страницаMaterialwindsurferke00750% (2)
- Cutting Speed ChartДокумент1 страницаCutting Speed ChartKevin WellsОценок пока нет
- Selection For Welding Consumables: A 479 Gr.316LДокумент2 страницыSelection For Welding Consumables: A 479 Gr.316LanandmlОценок пока нет
- Oxy Fuel Cutting Text Cover PageДокумент14 страницOxy Fuel Cutting Text Cover Pagekevin mundaОценок пока нет
- WPS PDFДокумент5 страницWPS PDFHakanОценок пока нет
- Weld Cost CalculationДокумент15 страницWeld Cost CalculationMustafa KaramürselОценок пока нет
- Weld RepireДокумент91 страницаWeld RepireالGINIRAL FREE FIREОценок пока нет
- Welding and Fabrication NoteДокумент54 страницыWelding and Fabrication NoteluminiousОценок пока нет
- M2 U7 Plasma Arc CuttingДокумент29 страницM2 U7 Plasma Arc CuttingKenan MuhamedagicОценок пока нет
- WI & CERT Kelas EДокумент22 страницыWI & CERT Kelas EKevin ArmandoОценок пока нет
- GTAW Welding of CP Titanium and Ti6Al4VДокумент1 страницаGTAW Welding of CP Titanium and Ti6Al4VDeepak KumarОценок пока нет
- Set-Up Tack Welding Procedure For Drum Long & Cirseam Butt Welds Control No. Revision No.: 0 Date: Page: 1 of 1Документ1 страницаSet-Up Tack Welding Procedure For Drum Long & Cirseam Butt Welds Control No. Revision No.: 0 Date: Page: 1 of 1sbmmlaОценок пока нет
- Welding Consumable GuideДокумент26 страницWelding Consumable Guidebrianpham007100% (1)
- Weldability of MaterialsДокумент5 страницWeldability of MaterialsclnОценок пока нет
- Welding Cost Estimation For 12 Joints in 8 NPS SCH 80 PDFДокумент1 страницаWelding Cost Estimation For 12 Joints in 8 NPS SCH 80 PDFAnonymous VRspXsmОценок пока нет
- Final Welding of Ti Alloys and MG AlloysДокумент32 страницыFinal Welding of Ti Alloys and MG AlloysArjyajyoti GoswamiОценок пока нет
- Section 2 Gmaw Fundamentals: 2-1. Basic InformationДокумент9 страницSection 2 Gmaw Fundamentals: 2-1. Basic InformationEnriquinoОценок пока нет
- Approved ITP 06012023 For WT6Документ1 страницаApproved ITP 06012023 For WT6mohamed irsath100% (1)
- PWPS 013 PRДокумент2 страницыPWPS 013 PRRenjith Gopan100% (1)
- Welding Estimation ChartДокумент2 страницыWelding Estimation ChartJacob PriyadharshanОценок пока нет
- Material Linde: Asme Sec Ii A B 36.10 M B 16.25 Grade ASTMДокумент40 страницMaterial Linde: Asme Sec Ii A B 36.10 M B 16.25 Grade ASTMadarshОценок пока нет
- Welding ErrorsДокумент42 страницыWelding ErrorsSiva Sankara Narayanan SubramanianОценок пока нет
- Low Alloy SteelsДокумент54 страницыLow Alloy SteelsUsha Kiran KumarОценок пока нет
- Portfolio Storage&Drying Control ProcedureДокумент4 страницыPortfolio Storage&Drying Control Procedurelaz_kОценок пока нет
- Wps No. 0 Rev. No. 19: Asme Section Ix Welding Procedure SpecificationДокумент5 страницWps No. 0 Rev. No. 19: Asme Section Ix Welding Procedure SpecificationAmit ChapagainОценок пока нет
- (John Norrish) Advanced Welding Processes (BookFi) - Pages-85-91Документ7 страниц(John Norrish) Advanced Welding Processes (BookFi) - Pages-85-91Yusuf DarellОценок пока нет
- Pveng: Vessel With Large Opening Pve Sample VesselДокумент1 страницаPveng: Vessel With Large Opening Pve Sample VesselSivateja NallamothuОценок пока нет
- RWC Quality Manual 8 JulyДокумент15 страницRWC Quality Manual 8 JulyVipin Kumar Parashar100% (1)
- All Materials DocumentsДокумент1 страницаAll Materials DocumentsHarnish BariaОценок пока нет
- Comparison Table For Pipes and Fittings PDFДокумент1 страницаComparison Table For Pipes and Fittings PDFrcpretoriusОценок пока нет
- ITP Fuel Fillter (J-1001) Rev10+Документ9 страницITP Fuel Fillter (J-1001) Rev10+DjokoОценок пока нет
- Shielding GasesДокумент27 страницShielding GasesvarunОценок пока нет
- Leaflet Swing Beam Spreader PDFДокумент1 страницаLeaflet Swing Beam Spreader PDFGhyd ArtiagaОценок пока нет
- 2.2 - NDEP-C1574-5-6-7-8 - Rev.0 NDE Procedures Book PDFДокумент59 страниц2.2 - NDEP-C1574-5-6-7-8 - Rev.0 NDE Procedures Book PDFGeorge JhonsonОценок пока нет
- Welder Guide Book No. 2Документ17 страницWelder Guide Book No. 2MarcioОценок пока нет
- Zanner 1986Документ9 страницZanner 1986Harris DanielОценок пока нет
- Analysis of Thermoelectric Generator Performanceby Use of Simulations and ExperimentsДокумент8 страницAnalysis of Thermoelectric Generator Performanceby Use of Simulations and Experimentsyoung SОценок пока нет
- BS5080-2-1986 Structural Fixings in Concrete & Masonry PDFДокумент18 страницBS5080-2-1986 Structural Fixings in Concrete & Masonry PDFDylkanWingsОценок пока нет
- Energy: SciencedirectДокумент32 страницыEnergy: SciencedirectferayОценок пока нет
- BS EN 196 Part 2-1995 PDFДокумент52 страницыBS EN 196 Part 2-1995 PDFganmoses57% (7)
- 12350-8-2010 Fresh ConcreteДокумент14 страниц12350-8-2010 Fresh ConcreteTeguh Farid Nurul Iman100% (2)
- Golf V FuseДокумент38 страницGolf V FuseJhay100% (1)
- TWI UT of Butt Welds PDFДокумент46 страницTWI UT of Butt Welds PDFferayОценок пока нет
- Mathematical Modelling of GTAW and GMAWДокумент240 страницMathematical Modelling of GTAW and GMAWferayОценок пока нет
- TR CU Certification (EAC) : Tüv SüdДокумент2 страницыTR CU Certification (EAC) : Tüv SüdferayОценок пока нет
- Electrode Extension For GMAW PDFДокумент8 страницElectrode Extension For GMAW PDFferayОценок пока нет
- Dip Transfer in GMAWДокумент235 страницDip Transfer in GMAWferayОценок пока нет
- Dip Transfer in GMAWДокумент235 страницDip Transfer in GMAWferayОценок пока нет
- Double Electrode GMAWДокумент9 страницDouble Electrode GMAWferayОценок пока нет
- Double Electrode GMAWДокумент9 страницDouble Electrode GMAWferayОценок пока нет
- Ejsr 62 1 09Документ19 страницEjsr 62 1 09ferayОценок пока нет
- FCAW On Creep SteelДокумент5 страницFCAW On Creep SteelferayОценок пока нет
- Electrode Extension For GMAW PDFДокумент8 страницElectrode Extension For GMAW PDFferayОценок пока нет
- TR CU Certification (EAC) : Tüv SüdДокумент2 страницыTR CU Certification (EAC) : Tüv SüdferayОценок пока нет
- TR CU Certification (EAC) : Tüv SüdДокумент2 страницыTR CU Certification (EAC) : Tüv SüdferayОценок пока нет
- Cen TR 1513-2005Документ6 страницCen TR 1513-2005ferayОценок пока нет
- TR CU Certification (EAC) : Tüv SüdДокумент2 страницыTR CU Certification (EAC) : Tüv SüdferayОценок пока нет
- TR CU Certification (EAC) : Tüv SüdДокумент2 страницыTR CU Certification (EAC) : Tüv SüdferayОценок пока нет
- Epri Civa SoftwareДокумент52 страницыEpri Civa SoftwareferayОценок пока нет
- Cen TR 1513-2005Документ6 страницCen TR 1513-2005ferayОценок пока нет
- Mach 3 MillДокумент157 страницMach 3 Millafricano333100% (1)
- Mathematics IДокумент1 страницаMathematics IYadav MaheshОценок пока нет
- Astm D698Документ13 страницAstm D698Jorge CarrascoОценок пока нет
- 1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogДокумент5 страниц1) Semester II /1 / IV Exam 2020 (Even) (Old / New Syllabus) BacklogHarsh VardhanОценок пока нет
- Strategik Sains THN 4Документ9 страницStrategik Sains THN 4fletchertchrОценок пока нет
- Che 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionДокумент9 страницChe 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionKyungtae Park100% (2)
- Important Notes of 10th Class Math Exercise 3.2Документ12 страницImportant Notes of 10th Class Math Exercise 3.2Tayyabah ShahОценок пока нет
- PROG 8011 Lab 6-W24Документ2 страницыPROG 8011 Lab 6-W24kaurrrjass1125Оценок пока нет
- Geometry and Trigonometry PDFДокумент46 страницGeometry and Trigonometry PDFnewspaperОценок пока нет
- Design of Absorber: 5.1 AbsorptionsДокумент13 страницDesign of Absorber: 5.1 AbsorptionsNaya Septri HanaОценок пока нет
- BS en 10028-1Документ24 страницыBS en 10028-1Andrei Balázs100% (1)
- Loan Pre Research PaperДокумент4 страницыLoan Pre Research PaperVaseem AkramОценок пока нет
- Bearing FitsДокумент9 страницBearing Fitsm2110Оценок пока нет
- Lipid TestДокумент4 страницыLipid TestHak KubОценок пока нет
- About Ramfs Rootfs InitramfsДокумент7 страницAbout Ramfs Rootfs InitramfsNavaneethОценок пока нет
- Discovery of A New Energy VortexДокумент4 страницыDiscovery of A New Energy Vortexnblack3335140Оценок пока нет
- Design Calculation of PavementДокумент4 страницыDesign Calculation of Pavementorode franklyn100% (1)
- Handout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyДокумент14 страницHandout E.15 - Examples On Transient Response of First and Second Order Systems, System Damping and Natural FrequencyRishikesh BhavsarОценок пока нет
- Management - Ch06 - Forecasting and PremisingДокумент9 страницManagement - Ch06 - Forecasting and PremisingRameshKumarMurali0% (1)
- MPDFДокумент1 страницаMPDFVipul WankarОценок пока нет
- Optimization Questions For PracticeДокумент4 страницыOptimization Questions For PracticejvanandhОценок пока нет
- Cabinas de Bioseguridad HealforceДокумент8 страницCabinas de Bioseguridad HealforceJose HurtadoОценок пока нет
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsДокумент8 страницGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjОценок пока нет
- Final Field ProjectДокумент7 страницFinal Field ProjectKarl KaiОценок пока нет
- Service Manual: Bassbreaker™ 15Документ22 страницыService Manual: Bassbreaker™ 15John govanОценок пока нет
- ADO and SQL SERVERДокумент493 страницыADO and SQL SERVERKristian CevallosОценок пока нет
- Linear Interpolation Equation Formula Calculator PDFДокумент3 страницыLinear Interpolation Equation Formula Calculator PDFMatthew HaleОценок пока нет