Вам также может понравиться
- CCNA - Access List QuestionsДокумент3 страницыCCNA - Access List QuestionsBaaska214Оценок пока нет
- Fingerstyle Guitar - Fingerpicking Patterns and ExercisesДокумент42 страницыFingerstyle Guitar - Fingerpicking Patterns and ExercisesSeminario Lipa100% (6)
- Counters NOKLTE FL17A AlldataДокумент12 страницCounters NOKLTE FL17A AlldataNaga Babu DesinaОценок пока нет
- How To Code in RДокумент6 страницHow To Code in Rlayla zОценок пока нет
- Data Types, Values and Variables - Data TypesДокумент20 страницData Types, Values and Variables - Data TypesFuaDur RahmanОценок пока нет
- 01 Python Basics - 3Документ20 страниц01 Python Basics - 3ALOKE SAHA ANKURОценок пока нет
- Notes On C ProgДокумент28 страницNotes On C ProgAsim khandualОценок пока нет
- LexДокумент41 страницаLexvarsoliwalaОценок пока нет
- C Arrays FunctionДокумент65 страницC Arrays FunctionSheeba DhuruvarajОценок пока нет
- Unit - 5: Functions and PointersДокумент238 страницUnit - 5: Functions and PointerssridharegspОценок пока нет
- NIIT Vile ParleДокумент24 страницыNIIT Vile ParleGauravMakhechaОценок пока нет
- Variables, Data Types and OperatorsДокумент42 страницыVariables, Data Types and OperatorsRodie Rose BonaventeОценок пока нет
- LEX Programming: Lex and The Big PictureДокумент13 страницLEX Programming: Lex and The Big Pictureaklilu YebuzeyeОценок пока нет
- INTRODUCTION TO PROBLEM SOLVING USING C - Unit 4newДокумент21 страницаINTRODUCTION TO PROBLEM SOLVING USING C - Unit 4newbala vinothiniОценок пока нет
- Study Material Class-Xii Subject: Computer Science (083) 2017-2018 Basic Concepts of C++ (Review of Class Xi) Key Points: Introduction To C++Документ27 страницStudy Material Class-Xii Subject: Computer Science (083) 2017-2018 Basic Concepts of C++ (Review of Class Xi) Key Points: Introduction To C++Shubham PatelОценок пока нет
- PHP Arrays: What Is An Array?Документ18 страницPHP Arrays: What Is An Array?JD DulatreОценок пока нет
- C Programming - B PartДокумент19 страницC Programming - B PartPriya JoyОценок пока нет
- Chapter 4Документ22 страницыChapter 4Ram BhardwajОценок пока нет
- Chapter 8Документ20 страницChapter 8Jojo CansinoОценок пока нет
- Lab Experiment # 06: Introduction To C++Документ7 страницLab Experiment # 06: Introduction To C++Mubasher Sultan MehmoodОценок пока нет
- Flex Tool Presentation - DVKДокумент17 страницFlex Tool Presentation - DVKmarirahul24Оценок пока нет
- Type Conversion in CДокумент107 страницType Conversion in CsuryavamsiОценок пока нет
- 1 CS 3090: Safety Critical Programming in CДокумент47 страниц1 CS 3090: Safety Critical Programming in CdivyarОценок пока нет
- Data Flow DiagramДокумент9 страницData Flow Diagramzeenath2399Оценок пока нет
- LogRhythmRuleBuilding CheatSheet 6.1Документ11 страницLogRhythmRuleBuilding CheatSheet 6.1William Pope0% (1)
- CBSE Class 12 Computer ScienceДокумент10 страницCBSE Class 12 Computer ScienceSrijan GoyalОценок пока нет
- Unit 2 PHPДокумент21 страницаUnit 2 PHPboratkarvanshОценок пока нет
- Unit 5 - ArrayДокумент85 страницUnit 5 - ArrayUtpal KantОценок пока нет
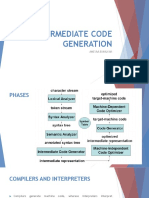
- Intermediate Code Generation Rswup0xfkfДокумент26 страницIntermediate Code Generation Rswup0xfkfJenil GathaniОценок пока нет
- Object Oriented Programming Structure: Class Assignment No. 1Документ28 страницObject Oriented Programming Structure: Class Assignment No. 1Bhavin ShahОценок пока нет
- C FundamentalsДокумент31 страницаC Fundamentalsakhil15011989Оценок пока нет
- IP Unit 3Документ39 страницIP Unit 3Harsh GuptaОценок пока нет
- Refcard Card OctaveДокумент3 страницыRefcard Card OctaveJairoОценок пока нет
- Python Basics: #This Is A Comment. #This Is Also A Comment. There Are No Multi-Line CommentsДокумент19 страницPython Basics: #This Is A Comment. #This Is Also A Comment. There Are No Multi-Line CommentsketulpatlОценок пока нет
- Ex No: 1 Date: Develop A Lexical Analyzer To Recognize Tokens in CДокумент46 страницEx No: 1 Date: Develop A Lexical Analyzer To Recognize Tokens in C012AKHILA VIGNESHОценок пока нет
- Types of C Constants: C Constants Can Be Divided Into Two Major Categories: Primary Constants Secondary ConstantsДокумент21 страницаTypes of C Constants: C Constants Can Be Divided Into Two Major Categories: Primary Constants Secondary ConstantsKarthi KannanОценок пока нет
- 1.php I SlidesДокумент87 страниц1.php I SlidesJaswanth RachaОценок пока нет
- Arrays and FunctionsДокумент11 страницArrays and FunctionsshailajaОценок пока нет
- VB Scripting UltimateДокумент117 страницVB Scripting UltimateBikram SahaОценок пока нет
- Js 2Документ28 страницJs 2anamika soodhОценок пока нет
- Foc and C AssingmentДокумент23 страницыFoc and C Assingmentaaryanbhatnagar04Оценок пока нет
- Fall 2011 Bachelor of Computer Application (BCA) - Semester 1 BC0034 - Computer Concepts & C Programming (Book ID: B0678) Assignment Set - 1Документ28 страницFall 2011 Bachelor of Computer Application (BCA) - Semester 1 BC0034 - Computer Concepts & C Programming (Book ID: B0678) Assignment Set - 1Sintu MathurОценок пока нет
- BCA Computer Concept & C Programming SEMESTER - 1 ST AssignmentДокумент7 страницBCA Computer Concept & C Programming SEMESTER - 1 ST Assignmentmanoj_yadav_129% (7)
- C Introduction11Документ291 страницаC Introduction11Saad SayedОценок пока нет
- Escape Sequences in StringsДокумент13 страницEscape Sequences in Stringsflautisimo1693Оценок пока нет
- Python Is An InterpretedДокумент6 страницPython Is An InterpretedBiniam HaddisОценок пока нет
- Lecture 22 (Pic)Документ13 страницLecture 22 (Pic)Yaagik GoelОценок пока нет
- C ProgramДокумент27 страницC ProgrameajasminОценок пока нет
- 'C' SQP-4Документ22 страницы'C' SQP-4kinglokyОценок пока нет
- Ge2112 - Fundamentals of Computing and Programming: Unit V Functions and PointersДокумент28 страницGe2112 - Fundamentals of Computing and Programming: Unit V Functions and PointerspunithavallisudanОценок пока нет
- Ch6 FunctionsДокумент17 страницCh6 Functionsiqra educationОценок пока нет
- What Is C++?Документ63 страницыWhat Is C++?sartajalam8023Оценок пока нет
- Study of TCLДокумент11 страницStudy of TCLGaneshVenkatachalamОценок пока нет
- System Programming Lab: LEX: Lexical Analyser GeneratorДокумент33 страницыSystem Programming Lab: LEX: Lexical Analyser GeneratorDivya D GowdaОценок пока нет
- Sas Functions PocketrefДокумент171 страницаSas Functions Pocketrefgaggy1983Оценок пока нет
- Sas Functions PocketrefДокумент171 страницаSas Functions PocketrefSethuraman VОценок пока нет
- TP-610Документ26 страницTP-610Paritosh BelekarОценок пока нет
- Data Structures Through C Language: List of AlgorithmsДокумент47 страницData Structures Through C Language: List of Algorithmsbiswajit biswalОценок пока нет
- Experiment 1: Write A Python Program To Find Sum of Series (1+ (1+2) + (1+2+3) +-+ (1+2+3+ - +N) )Документ20 страницExperiment 1: Write A Python Program To Find Sum of Series (1+ (1+2) + (1+2+3) +-+ (1+2+3+ - +N) )jai geraОценок пока нет
- Differentiate Between Data Type and Data StructuresДокумент11 страницDifferentiate Between Data Type and Data StructureskrishnakumarОценок пока нет
- Arrays: 6.1 IntroductionДокумент22 страницыArrays: 6.1 IntroductionstealthhackerОценок пока нет
- C MKTP 2542541Документ1 страницаC MKTP 2542541Bursuc AlbertОценок пока нет
- C MKTP 2542542Документ1 страницаC MKTP 2542542Bursuc AlbertОценок пока нет
- Resume Template ISIT - JAVAДокумент2 страницыResume Template ISIT - JAVABursuc AlbertОценок пока нет
- Acorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDДокумент1 страницаAcorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDBursuc AlbertОценок пока нет
- Beethoven Simfonia A IX-aДокумент24 страницыBeethoven Simfonia A IX-aBursuc AlbertОценок пока нет
- Acorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDДокумент1 страницаAcorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDBursuc AlbertОценок пока нет
- Acorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDДокумент1 страницаAcorduri Minor SD, Micșorat SD, Major SD, Mărit Enarmonic, Minor 6, Major SDBursuc AlbertОценок пока нет
- Cant Aleluia! - Violin IIДокумент2 страницыCant Aleluia! - Violin IIBursuc AlbertОценок пока нет
- Petronas Technical Standards: Symbols and Identification System - MechanicalДокумент16 страницPetronas Technical Standards: Symbols and Identification System - MechanicalUdaya Zorro100% (1)
- Copyright Green PaperДокумент122 страницыCopyright Green Papertorrentfreak100% (1)
- TUPT AdmissionDegreeLadderizedДокумент1 страницаTUPT AdmissionDegreeLadderizedromerqazwsxОценок пока нет
- Lowel LightsДокумент80 страницLowel LightsSaulo Valley100% (1)
- SE440BX-2 Motherboard: Technical Product SpecificationДокумент90 страницSE440BX-2 Motherboard: Technical Product SpecificationEvelio MorenoОценок пока нет
- Soliphant T FTM20, FTM21: Technical Information VibronicДокумент16 страницSoliphant T FTM20, FTM21: Technical Information VibronicmichaelОценок пока нет
- Self-Regulated Learning - Where We Are TodayДокумент13 страницSelf-Regulated Learning - Where We Are Todayvzzvnumb100% (1)
- 9A01304 Fluid MechanicsДокумент4 страницы9A01304 Fluid MechanicssivabharathamurthyОценок пока нет
- Pharma MarketingДокумент55 страницPharma MarketingArpan KoradiyaОценок пока нет
- Payment Advice Outward Telegraphic Transfer: DateДокумент2 страницыPayment Advice Outward Telegraphic Transfer: DateRomanov DalsheОценок пока нет
- Rubric For Case StudyДокумент1 страницаRubric For Case StudyCj NavarroОценок пока нет
- Creating Flight Plan and User Waypoint Files For The Flight1 GTNДокумент6 страницCreating Flight Plan and User Waypoint Files For The Flight1 GTNJosé A. Montiel QuirósОценок пока нет
- Arzator Rooftop ApenДокумент44 страницыArzator Rooftop ApenEu TuОценок пока нет
- Cembrit Patina Design Line - LowresДокумент11 страницCembrit Patina Design Line - LowresRaul AntonieОценок пока нет
- Shear Strength in The New Eurocode 2. A Step ForwardДокумент10 страницShear Strength in The New Eurocode 2. A Step ForwardChineseAssassinОценок пока нет
- Selected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Документ9 страницSelected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Rajalakshmi BashyamОценок пока нет
- 1.yes Bank: Human Capital Initiatives of A Startup in The Indian Banking IndustryДокумент10 страниц1.yes Bank: Human Capital Initiatives of A Startup in The Indian Banking IndustryManvi JainОценок пока нет
- iJARS1266AUTH PDFДокумент17 страницiJARS1266AUTH PDFAarti GoutamОценок пока нет
- Edited - Meenakshi Kumari RaiДокумент1 страницаEdited - Meenakshi Kumari RaiThunderBird GamerОценок пока нет
- Coal JourneyДокумент2 страницыCoal JourneyasnandyОценок пока нет
- Beechcraft Heritage MuseumДокумент16 страницBeechcraft Heritage MuseumCAP History LibraryОценок пока нет
- Lampiran BДокумент3 страницыLampiran BIqbhal WanaharaОценок пока нет
- Model Space & Layout (Paper) SpaceДокумент7 страницModel Space & Layout (Paper) SpaceIonela Lioara TutaОценок пока нет
- Running Head: Digital Storytelling As An Assessment Tool 1Документ9 страницRunning Head: Digital Storytelling As An Assessment Tool 1vifongiОценок пока нет
- Riphah Project GuidelinesДокумент14 страницRiphah Project GuidelinesTanveer AhmedОценок пока нет
- The GPSA 13th Edition Major ChangesДокумент2 страницыThe GPSA 13th Edition Major Changespatrickandreas77Оценок пока нет
- Mobile Crane Inspector & CertificationДокумент3 страницыMobile Crane Inspector & CertificationgptothОценок пока нет