Вам также может понравиться
- 9 Science Experiments About Light For KidsДокумент7 страниц9 Science Experiments About Light For KidsgaylebugayongОценок пока нет
- Customizing ANSYS Workbench - Sudharshan RenganathanДокумент29 страницCustomizing ANSYS Workbench - Sudharshan Renganathansvk_ntОценок пока нет
- Kinematics Jee Advanced ArchiveДокумент5 страницKinematics Jee Advanced ArchiveIshu FuliyaОценок пока нет
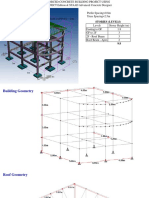
- Design of PSC Superstructure PDFДокумент168 страницDesign of PSC Superstructure PDFBilal A BarbhuiyaОценок пока нет
- 1968 - Ultimate Strength Analysis of Prestressed Concrete Pressure Vessels - RASHIDДокумент11 страниц1968 - Ultimate Strength Analysis of Prestressed Concrete Pressure Vessels - RASHIDMarcos Alves da SilvaОценок пока нет
- Mackenzie PVP2017 Stress Linearization Concepts and Restrictions in Elastic Design by AnalysisДокумент8 страницMackenzie PVP2017 Stress Linearization Concepts and Restrictions in Elastic Design by Analysissvk_ntОценок пока нет
- Fatigue Calculation For Welded Joints of Bearing Elements of Freight Car BogieДокумент5 страницFatigue Calculation For Welded Joints of Bearing Elements of Freight Car Bogiesvk_ntОценок пока нет
- Review of The Master SN Neuber Rule in The ASME Division 2 Rewrite ProjectДокумент15 страницReview of The Master SN Neuber Rule in The ASME Division 2 Rewrite Projectsvk_nt100% (1)
- ANSYS Explicit Dynamics Material ModelsДокумент56 страницANSYS Explicit Dynamics Material Modelssvk_nt100% (1)
- 2 Storeys BuildingДокумент30 страниц2 Storeys BuildinglavyОценок пока нет
- 3 Elasticity PDFДокумент24 страницы3 Elasticity PDFniar asniar100% (1)
- AQA A2 Physics A Chapter 7 Textbook AnswersДокумент5 страницAQA A2 Physics A Chapter 7 Textbook Answerscathylister100% (3)
- Rubber PhysicsДокумент140 страницRubber Physicssvk_ntОценок пока нет
- Final Quiz - Asme Pcc-2Документ15 страницFinal Quiz - Asme Pcc-2ajaysharma_100975% (4)
- 1979 IEDM pp.22-25Документ4 страницы1979 IEDM pp.22-25Wenqi ZhangОценок пока нет
- Historical Perspective and State of The Art in Robot Force ControlДокумент7 страницHistorical Perspective and State of The Art in Robot Force Controlعلي ايادОценок пока нет
- A Frequency Domain Method For Tuning Hydro GovernorsДокумент4 страницыA Frequency Domain Method For Tuning Hydro GovernorsadinamartinsОценок пока нет
- 10.1515 jmbm.1993.4.4.297Документ10 страниц10.1515 jmbm.1993.4.4.297Supantho ChaudhuriОценок пока нет
- Metallurgical Factors Affecting Fracture Toughness of Aluminum AlloysДокумент16 страницMetallurgical Factors Affecting Fracture Toughness of Aluminum AlloysAlberto Rincon VargasОценок пока нет
- Earthing BrushДокумент6 страницEarthing Brushniyop4allОценок пока нет
- Szekely1976 PDFДокумент9 страницSzekely1976 PDFlrodriguez_892566Оценок пока нет
- The Capacity Design of Reinforced Concrete Hybrid Structures For Multistorey Buildings T. Paulay and W. J. GoodsirДокумент17 страницThe Capacity Design of Reinforced Concrete Hybrid Structures For Multistorey Buildings T. Paulay and W. J. GoodsirFrankie ChanОценок пока нет
- Slaters RuleДокумент16 страницSlaters RuleChamp LuciFerОценок пока нет
- Covariance MatrixДокумент10 страницCovariance Matrixcristina iordacheОценок пока нет
- RF Power Amplifier FundamentalsДокумент1 страницаRF Power Amplifier FundamentalsEnos Marcos BastosОценок пока нет
- Elastic Behavior of Soil-Cement MixturesДокумент10 страницElastic Behavior of Soil-Cement MixturesJhinОценок пока нет
- Effect of Shot-Peening On Surface Crack Propagation in Plane-Bending FatigueДокумент8 страницEffect of Shot-Peening On Surface Crack Propagation in Plane-Bending FatigueaapennsylvaniaОценок пока нет
- Studies in Gas Solid ReactionsДокумент8 страницStudies in Gas Solid ReactionsumarlucioОценок пока нет
- Released To To Publish All FormsДокумент11 страницReleased To To Publish All FormsAnonymous kK9Ep5b1Оценок пока нет
- Solidification ProcessingДокумент14 страницSolidification ProcessingTrupti Ranjan DasОценок пока нет
- Analysis of A Class of PWMДокумент7 страницAnalysis of A Class of PWMMaha SoeОценок пока нет
- Released To Alaa Topublish All FormsДокумент3 страницыReleased To Alaa Topublish All FormsmofazОценок пока нет
- Physical Properties of Uranium Process Solutions byДокумент15 страницPhysical Properties of Uranium Process Solutions byShrishma PaikОценок пока нет
- Buckling: SandiaДокумент19 страницBuckling: SandiamajorikahnОценок пока нет
- A New Fourier Descriptor Applicable To Open Curves: Translated FromДокумент10 страницA New Fourier Descriptor Applicable To Open Curves: Translated FromMayraSáenzОценок пока нет
- Natural Frequencies of Toroidal TanksДокумент27 страницNatural Frequencies of Toroidal TanksHCStepОценок пока нет
- Flash Annealing Amorphous Alloys: SeptemberДокумент3 страницыFlash Annealing Amorphous Alloys: SeptemberAMS Lab.Оценок пока нет
- Lie Algebras by Nathan Jacobson Interscience Tracts in Pure and Applied Mathematics Number 10 John Wiley and Son Inc New York 1962Документ2 страницыLie Algebras by Nathan Jacobson Interscience Tracts in Pure and Applied Mathematics Number 10 John Wiley and Son Inc New York 1962Vítor Machado MarquesОценок пока нет
- 10 - 3 - New York - 09-66 - 0058Документ14 страниц10 - 3 - New York - 09-66 - 0058Juan Bayron MuñozОценок пока нет
- Practical Aspects of Sampling PulpsДокумент36 страницPractical Aspects of Sampling PulpsAntonio Jhunio Talavera MendozaОценок пока нет
- 19650017047Документ15 страниц19650017047zinoyobОценок пока нет
- Stresses in Beams With Circular Eccentric Web HoesДокумент49 страницStresses in Beams With Circular Eccentric Web HoesBhavik MakaniОценок пока нет
- High-Voltage Spiral Generators - A Ramrus - F Rose - 1976Документ6 страницHigh-Voltage Spiral Generators - A Ramrus - F Rose - 1976Fernando FerreiraОценок пока нет
- A Modified Weibull Theory FOR THE: Strength of Granular Brittle MaterialДокумент28 страницA Modified Weibull Theory FOR THE: Strength of Granular Brittle Materialu4sachin3224Оценок пока нет
- Factors InfluencingcompactionofsoilsДокумент11 страницFactors InfluencingcompactionofsoilsviperturkОценок пока нет
- Guar Gel IngredientsДокумент36 страницGuar Gel IngredientsShaz MohamedОценок пока нет
- Isp 1975 2224802Документ16 страницIsp 1975 2224802Thibault HugОценок пока нет
- Liebeck 1976Документ25 страницLiebeck 1976marco_cj_orgОценок пока нет
- Burkhart 1975 Conference SubsonicДокумент10 страницBurkhart 1975 Conference SubsonicJoshua MorrowОценок пока нет
- Behaviour of Reinforced Masonry Shear Walls Under Cyclic Loading (1971)Документ15 страницBehaviour of Reinforced Masonry Shear Walls Under Cyclic Loading (1971)Lucas ScartonОценок пока нет
- Very Low Frequencies Internal Friction Measurements of Ice I HДокумент6 страницVery Low Frequencies Internal Friction Measurements of Ice I Hkannanmech87Оценок пока нет
- ABM Mohd Amaan SheikhДокумент2 страницыABM Mohd Amaan SheikhMohd Amaan SheikhОценок пока нет
- Reactive Power Generation and Control by Thyristor CircuitsДокумент11 страницReactive Power Generation and Control by Thyristor Circuitsrakeshee2007Оценок пока нет
- Engineering-Medical Analysis of Fatal and Non-Fatal Head Injuries of Helmeted Motorcycle VictimsДокумент9 страницEngineering-Medical Analysis of Fatal and Non-Fatal Head Injuries of Helmeted Motorcycle VictimsDeepsОценок пока нет
- High Damping in Grey Cast Iron: To Cite This VersionДокумент5 страницHigh Damping in Grey Cast Iron: To Cite This VersionOutvaluing Vanmen GreensОценок пока нет
- National Advisory Committee: AeronauticsДокумент43 страницыNational Advisory Committee: AeronauticslavrikОценок пока нет
- CHAPTER 1 Is 3 D Wave Equation Modeling Feasible in The Next Ten Years - 1989 - Handbook of Geophysical Exploration Seismic ExplorationДокумент10 страницCHAPTER 1 Is 3 D Wave Equation Modeling Feasible in The Next Ten Years - 1989 - Handbook of Geophysical Exploration Seismic ExplorationemarrocosОценок пока нет
- Spurr, 1986, Slender Arch RoofДокумент11 страницSpurr, 1986, Slender Arch Roofprisciliano1Оценок пока нет
- Ch17 Part 1Документ20 страницCh17 Part 1Mister MysteriousОценок пока нет
- Esl HH 84 08 07Документ6 страницEsl HH 84 08 07Aazim Raza KhanОценок пока нет
- Von Karman 1930 - Mechanical Similitude and TurbulenceДокумент22 страницыVon Karman 1930 - Mechanical Similitude and TurbulenceJason HarleyОценок пока нет
- Comparison of Methods For Measurement of Quartz Crystal Resonators With Load CapacitanceДокумент9 страницComparison of Methods For Measurement of Quartz Crystal Resonators With Load Capacitancenazmulanamrafi15Оценок пока нет
- Published Online by Cambridge University PressДокумент2 страницыPublished Online by Cambridge University PressHervé DupuisОценок пока нет
- Recuperción de Níquel ECOTECДокумент11 страницRecuperción de Níquel ECOTECJesús RiberaОценок пока нет
- Soil Mechanics Property Characterization and Analysis Procedures-Wroth & HoulsbyДокумент55 страницSoil Mechanics Property Characterization and Analysis Procedures-Wroth & HoulsbyAnonymous GnfGTwОценок пока нет
- A Line OnДокумент9 страницA Line Onghuran khatweОценок пока нет
- A General Method For Determining Resonances in Transformer WindingsДокумент8 страницA General Method For Determining Resonances in Transformer WindingsIlona Dr. SmunczОценок пока нет
- Studer RM250 Catalogue 1959Документ10 страницStuder RM250 Catalogue 1959Sunnybanerjee1991Оценок пока нет
- Deteruination of Reactivity Ratios in Copolymerization: Makromol. Chem., Macromol. Symp. (1987)Документ20 страницDeteruination of Reactivity Ratios in Copolymerization: Makromol. Chem., Macromol. Symp. (1987)chemical_alltimeОценок пока нет
- flow meter SS 类Документ14 страницflow meter SS 类Yein SawoungОценок пока нет
- Fundamentals of Earthquake Engineering: Those Familiar With Newmark - S and RosenДокумент1 страницаFundamentals of Earthquake Engineering: Those Familiar With Newmark - S and RosenBladimir Jesús Ccama Cutipa0% (1)
- Design of Pillars in Shrinkage StopingДокумент13 страницDesign of Pillars in Shrinkage StopingManuel QuirozОценок пока нет
- Seismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationОт EverandSeismic Migration: Imaging of Acoustic Energy by Wave Field ExtrapolationОценок пока нет
- Ansys Capabilities 2019 r2Документ41 страницаAnsys Capabilities 2019 r2svk_ntОценок пока нет
- Freudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFДокумент11 страницFreudenberg - A New Elastic-Plastic Material Model With Non-Linear Elastic Behaviour For Thermoplastic PDFsvk_ntОценок пока нет
- Week5 Surface Effect Elements PDFДокумент7 страницWeek5 Surface Effect Elements PDFsvk_ntОценок пока нет
- J C Simo and F Armero Geometrically Nonlinear Enhanced Strain Mixed Methods and The Method of Incompatible Modes IJNME Vol 33 PP 1413-1449 1992Документ81 страницаJ C Simo and F Armero Geometrically Nonlinear Enhanced Strain Mixed Methods and The Method of Incompatible Modes IJNME Vol 33 PP 1413-1449 1992svk_ntОценок пока нет
- Comfortable Rail Travel Aa v11 I1Документ6 страницComfortable Rail Travel Aa v11 I1svk_ntОценок пока нет
- Consulting Flyer CADFEM UPF User Programmable FunctionДокумент1 страницаConsulting Flyer CADFEM UPF User Programmable Functionsvk_ntОценок пока нет
- PADT TheFocus 70Документ10 страницPADT TheFocus 70svk_ntОценок пока нет
- On Approximate Jacobian Matrices in Simulation of Multibody SystemsДокумент2 страницыOn Approximate Jacobian Matrices in Simulation of Multibody Systemssvk_ntОценок пока нет
- Parameter Optimization For H-Beams Based On ANSYS Workbench DesignXplorerДокумент4 страницыParameter Optimization For H-Beams Based On ANSYS Workbench DesignXplorersvk_ntОценок пока нет
- Simplified Concrete Modeling With Mat - Concrete - Damage - Rel3: Leonard E SchwerДокумент14 страницSimplified Concrete Modeling With Mat - Concrete - Damage - Rel3: Leonard E Schwersvk_ntОценок пока нет
- AC Traction Motor Matlab/SimulinkДокумент3 страницыAC Traction Motor Matlab/Simulinksvk_nt100% (1)
- Symbolic Computation of Dynamics On Smooth ManifoldsДокумент16 страницSymbolic Computation of Dynamics On Smooth Manifoldssvk_ntОценок пока нет
- Introduction To The Finite Element Method (2) : Petr KabeleДокумент58 страницIntroduction To The Finite Element Method (2) : Petr Kabelesvk_ntОценок пока нет
- CADFEM Results in Different Post MAPDL and ANSYS WorkbenchДокумент6 страницCADFEM Results in Different Post MAPDL and ANSYS Workbenchsvk_ntОценок пока нет
- Extension of The ANSYS Creep and Damage - User ProgrammingДокумент40 страницExtension of The ANSYS Creep and Damage - User Programmingsvk_ntОценок пока нет
- Random Vibration Fatigue Analysis With LS-DYNAДокумент16 страницRandom Vibration Fatigue Analysis With LS-DYNAsvk_nt100% (1)
- Surface Severe Plastic Deformation of AISI 304 Via Conventional Shotpeening, Severe Shot Peening and RepeeningДокумент7 страницSurface Severe Plastic Deformation of AISI 304 Via Conventional Shotpeening, Severe Shot Peening and RepeeningjrdelsilvaОценок пока нет
- OFWHДокумент2 страницыOFWHapi-3830954Оценок пока нет
- Physics: Pearson EdexcelДокумент32 страницыPhysics: Pearson EdexcelApsara WijemuniОценок пока нет
- Proposed Pipe Pile Strain Limits For ASCE 61-19: September 2019Документ13 страницProposed Pipe Pile Strain Limits For ASCE 61-19: September 2019JOSEPH MICHAEL HERNANDEZ TAMAYOОценок пока нет
- APROS Models For Thermal Hydraulic Analyses of Forsmark's NPPS, Kärnteknik 2008Документ3 страницыAPROS Models For Thermal Hydraulic Analyses of Forsmark's NPPS, Kärnteknik 2008Otso CronvallОценок пока нет
- Week 4-Stage Continuous Gas-Liquid Separation Processes-CHEM3011-2020-2021Документ33 страницыWeek 4-Stage Continuous Gas-Liquid Separation Processes-CHEM3011-2020-2021Nitin RautОценок пока нет
- Rheology of The Earth's Mantle: A Historical Review: Gondwana Research July 2010Документ30 страницRheology of The Earth's Mantle: A Historical Review: Gondwana Research July 2010MarcosGouveaОценок пока нет
- Tugas 2 FlotasiДокумент25 страницTugas 2 FlotasiRizky RОценок пока нет
- Report of Internship UniCol, Mirpurkhas Ethanol DistilleryДокумент10 страницReport of Internship UniCol, Mirpurkhas Ethanol DistilleryTalal KhanОценок пока нет
- Hopper DesignДокумент37 страницHopper DesignFeroz Khan PatthanОценок пока нет
- CBSE NCERT Solutions For Class 12 Chemistry Chapter 2: Back of Chapter QuestionsДокумент45 страницCBSE NCERT Solutions For Class 12 Chemistry Chapter 2: Back of Chapter QuestionsJ Sai TejaОценок пока нет
- Cev544 Assignment Mar 2018 - Jul 2018Документ4 страницыCev544 Assignment Mar 2018 - Jul 2018Faradilah Binti Ajma'inОценок пока нет
- Dr. Shadi Hanandeh: CE 30148331-Foundation DesignДокумент10 страницDr. Shadi Hanandeh: CE 30148331-Foundation DesignElham Al-khatibОценок пока нет
- Solubility and Solubility Product ConstanДокумент18 страницSolubility and Solubility Product ConstanNur Masyittah IrmiОценок пока нет
- IP: Potential Diagram WorksheetДокумент5 страницIP: Potential Diagram WorksheetAryan PatelОценок пока нет
- Laplace EqnДокумент5 страницLaplace EqnAditya DesaiОценок пока нет
- MEC481 Course InfoДокумент2 страницыMEC481 Course InfoRusyidiAbdullahОценок пока нет
- Rectangular Waveguide Through MatlabДокумент6 страницRectangular Waveguide Through MatlabSaloni AgarwalОценок пока нет
- RS6100004Документ52 страницыRS6100004e_readingОценок пока нет
- Tarea 2 FisicaДокумент5 страницTarea 2 FisicaNestor UlloaОценок пока нет
- SLB - Jet BlasterДокумент2 страницыSLB - Jet BlasterMahmoud MohamedОценок пока нет
- 29.industrial Food-Freezing SystemsДокумент17 страниц29.industrial Food-Freezing Systemspratheesh100% (1)