Вам также может понравиться
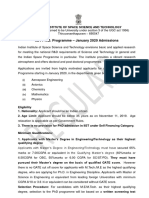
- IIST Ph.D. Programme - January 2020 Admissions: (I) (Ii) (Iii) (Iv) (V)Документ13 страницIIST Ph.D. Programme - January 2020 Admissions: (I) (Ii) (Iii) (Iv) (V)NISHANTОценок пока нет
- GATE Aerospace Coaching by Team IGC Engineering MathematicsДокумент5 страницGATE Aerospace Coaching by Team IGC Engineering MathematicsNISHANTОценок пока нет
- GATE Aerospace Coaching by Team IGC Aircraft Propulsion BasicsДокумент3 страницыGATE Aerospace Coaching by Team IGC Aircraft Propulsion BasicsNISHANTОценок пока нет
- Aerospace EngineeringДокумент3 страницыAerospace EngineeringvenkatОценок пока нет
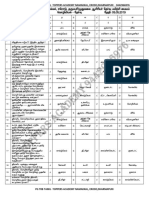
- PG TRB Tamil Unit I Impartent Question Toppers Academy Namakkal PDFДокумент8 страницPG TRB Tamil Unit I Impartent Question Toppers Academy Namakkal PDFNISHANT100% (1)
- NETpublicNoticePsychology PDFДокумент1 страницаNETpublicNoticePsychology PDFNISHANTОценок пока нет
- Categories of Admission PDFДокумент4 страницыCategories of Admission PDFNISHANTОценок пока нет
- GATE Aerospace Coaching by Team IGC Aircraft StabilityДокумент13 страницGATE Aerospace Coaching by Team IGC Aircraft StabilityNISHANTОценок пока нет
- Wind TunneL 2 MarK and 16 MarK With AnsweRДокумент26 страницWind TunneL 2 MarK and 16 MarK With AnsweRaeroheroz67% (3)
- Presentation by MohandasДокумент15 страницPresentation by MohandasNISHANTОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CFD Analysis of Flow Through Rotating Combustion SwirlerДокумент4 страницыCFD Analysis of Flow Through Rotating Combustion SwirlerNISHANTОценок пока нет
- Preliminary Design of A Business Jet AircraftДокумент9 страницPreliminary Design of A Business Jet AircraftNISHANTОценок пока нет
- AU FAQ'sДокумент27 страницAU FAQ'sNISHANTОценок пока нет
- 1 PDFДокумент17 страниц1 PDFNISHANTОценок пока нет
- Preliminary Design of A Business Jet AircraftДокумент9 страницPreliminary Design of A Business Jet AircraftNISHANTОценок пока нет
- Common Mode Stability in Fully Differential Voltage Feedback CMOS AmplifiersДокумент5 страницCommon Mode Stability in Fully Differential Voltage Feedback CMOS AmplifiersNISHANTОценок пока нет
- YYY "Yyyyy Yyy &Y Yyy Y Y 2 Y Y 2 Y Yy Y, Y: 'Y 'Y 'Y 'Y 'YДокумент26 страницYYY "Yyyyy Yyy &Y Yyy Y Y 2 Y Y 2 Y Yy Y, Y: 'Y 'Y 'Y 'Y 'YNISHANTОценок пока нет
- How To Measure Turbulence With Hotwire AnemometersДокумент73 страницыHow To Measure Turbulence With Hotwire AnemometersAnds ProençaОценок пока нет
- Elegibility Certificate FormatДокумент1 страницаElegibility Certificate FormatNISHANTОценок пока нет
- Mixing Enhancement Using Chevron Nozzle: Studies On Free Jets and Confined JetsДокумент14 страницMixing Enhancement Using Chevron Nozzle: Studies On Free Jets and Confined JetsNISHANTОценок пока нет
- Introduction To CFDДокумент2 страницыIntroduction To CFDNISHANTОценок пока нет
- SP English PDFДокумент4 страницыSP English PDFRohit GandhiОценок пока нет
- Section A: Circle The Correct AnswerДокумент10 страницSection A: Circle The Correct AnswerNISHANTОценок пока нет
- Aerospace EngineeringДокумент3 страницыAerospace EngineeringvenkatОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Visual Design Elements and PrinciplesДокумент9 страницVisual Design Elements and PrinciplesgamerootОценок пока нет
- 2 Manual de Proteccin Catdica Cathodic Protection HandbooДокумент59 страниц2 Manual de Proteccin Catdica Cathodic Protection Handboogoyote100% (1)
- R 2008 M.E. Power System SyllabusДокумент24 страницыR 2008 M.E. Power System SyllabuskarthikeyanОценок пока нет
- LZ96a Dist - Relay1Документ40 страницLZ96a Dist - Relay1RK K0% (1)
- Johor-Answer P2-Trial SPM 2007Документ8 страницJohor-Answer P2-Trial SPM 2007kamalharmozaОценок пока нет
- CHAPTER 2 - Data & SignalДокумент65 страницCHAPTER 2 - Data & SignalIzzati RahimОценок пока нет
- PipephaseДокумент32 страницыPipephaseZadeh NormanОценок пока нет
- Matter and Consciousness - Iain McGilcristДокумент34 страницыMatter and Consciousness - Iain McGilcristmalcrowe100% (1)
- Agar Extraction Process For Gracilaria CliftoniiДокумент7 страницAgar Extraction Process For Gracilaria CliftoniiAdaОценок пока нет
- Electronique - Audio - Microphone Valve PreampДокумент7 страницElectronique - Audio - Microphone Valve PreampkoukihamedОценок пока нет
- Rubik's Revenge (4x4x4)Документ5 страницRubik's Revenge (4x4x4)Febbi Abdul MuktiОценок пока нет
- Fundamentals of Deformable BodiesДокумент73 страницыFundamentals of Deformable Bodiesacurvz2005Оценок пока нет
- Phys 1011 Final SAMPLEДокумент10 страницPhys 1011 Final SAMPLEJonah the mixerОценок пока нет
- Board Question Paper: July 2019: PhysicsДокумент3 страницыBoard Question Paper: July 2019: PhysicsMahendra ShahОценок пока нет
- Aperture 3Документ355 страницAperture 3Edu José MarínОценок пока нет
- Radar ReceiversДокумент15 страницRadar Receiversmas3565560100% (2)
- Separation Science - Chromatography Unit Thomas Wenzel Department of Chemistry Bates College, Lewiston ME 04240 Twenzel@bates - EduДокумент69 страницSeparation Science - Chromatography Unit Thomas Wenzel Department of Chemistry Bates College, Lewiston ME 04240 Twenzel@bates - EduthecriticОценок пока нет
- Chapter5 - Shear Resistance of A RC BeamДокумент27 страницChapter5 - Shear Resistance of A RC BeamHabo TareОценок пока нет
- Using The CONVAL Software For The Petrochemical Plant Control Valve Checking Case StudyДокумент6 страницUsing The CONVAL Software For The Petrochemical Plant Control Valve Checking Case Studychem_taОценок пока нет
- Chem M2 Laboratory Apparatus, Safety Rules & SymbolsДокумент29 страницChem M2 Laboratory Apparatus, Safety Rules & Symbolsdesidedo magpatigbasОценок пока нет
- Fluid Mechanics Lecture Week 6 Chapter 2 PPT With NotesДокумент40 страницFluid Mechanics Lecture Week 6 Chapter 2 PPT With NotesJake CanlasОценок пока нет
- 2011121503-3-Wannate 8221enДокумент2 страницы2011121503-3-Wannate 8221en8612106535Оценок пока нет
- 6.1.5 - Well Control Worksheet & Pump DataДокумент4 страницы6.1.5 - Well Control Worksheet & Pump DatadagingoОценок пока нет
- History of Photography Timeline Assignment 1Документ14 страницHistory of Photography Timeline Assignment 1api-357703158Оценок пока нет
- Enki CleanARC BrochureДокумент2 страницыEnki CleanARC BrochurebrenorbrophyОценок пока нет
- 7th Balkan Mining Congress - Proceedings Book 2Документ312 страниц7th Balkan Mining Congress - Proceedings Book 2Mikan Radenko MikanovićОценок пока нет
- Ben Vanderloo Qualifications Resume PDFДокумент1 страницаBen Vanderloo Qualifications Resume PDFASHVINI GAUTAMОценок пока нет
- Situation 1. Oil at Specific Gravity 0.761 Flows From Tank A To Tank E, As ShownДокумент2 страницыSituation 1. Oil at Specific Gravity 0.761 Flows From Tank A To Tank E, As ShownAgerico FunelasОценок пока нет
- Eh tw480Документ12 страницEh tw480fefotroncitoОценок пока нет
- ChapterДокумент18 страницChapterSharaf HantooshОценок пока нет