Вам также может понравиться
- Ten - Doc. TR 20 01 (Vol. II)Документ309 страницTen - Doc. TR 20 01 (Vol. II)Manoj OjhaОценок пока нет
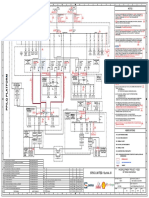
- Key Single Line DiagramДокумент1 страницаKey Single Line DiagramkirubakaraОценок пока нет
- BGD 2740 Lot 1.1 Volume 3 2019 01 10Документ503 страницыBGD 2740 Lot 1.1 Volume 3 2019 01 10vineets058Оценок пока нет
- Surge Arrestor SelectionДокумент24 страницыSurge Arrestor SelectionAdetunji TaiwoОценок пока нет
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОт EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsОценок пока нет
- GE B90 PresentationДокумент71 страницаGE B90 PresentationIsuru WijewardeneОценок пока нет
- Protocol Converter NR PCS 9794Документ3 страницыProtocol Converter NR PCS 9794kakakОценок пока нет
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsОт EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsОценок пока нет
- Sustainable Transformation of Yemen's Energy SystemДокумент41 страницаSustainable Transformation of Yemen's Energy Systemfath badiОценок пока нет
- Latest Panwar InterviewДокумент5 страницLatest Panwar InterviewpvenkyОценок пока нет
- P438 EN M R-b5-A 311 661 PDFДокумент1 192 страницыP438 EN M R-b5-A 311 661 PDFAshutosh KumarОценок пока нет
- REL 531-1-0 Line Distance Protection TerminalДокумент20 страницREL 531-1-0 Line Distance Protection Terminalsenthil kumarОценок пока нет
- Appoved Letter & Drawing of 400 KV Disconnector of MedhasalДокумент31 страницаAppoved Letter & Drawing of 400 KV Disconnector of MedhasalGuru MishraОценок пока нет
- Transformer Protection RET670: Exercise 1 - Differential Protection EngineeringДокумент52 страницыTransformer Protection RET670: Exercise 1 - Differential Protection EngineeringRobert MihayoОценок пока нет
- Final ProjectДокумент57 страницFinal ProjectKumar JiОценок пока нет
- A New Transformerless Single-Phase Buck-Boost AC Voltage RegulatorДокумент6 страницA New Transformerless Single-Phase Buck-Boost AC Voltage Regulatordinhngock6Оценок пока нет
- Hem May Bien Ap1Документ50 страницHem May Bien Ap1giathi957835100% (1)
- Auto Transformer Protection SchemesДокумент3 страницыAuto Transformer Protection SchemesArogya Raju PudhotaОценок пока нет
- ABB Busbar Protection REB670 2.0 ANSIДокумент498 страницABB Busbar Protection REB670 2.0 ANSIksg9731Оценок пока нет
- Transformer Overflux ProtectionДокумент3 страницыTransformer Overflux ProtectionkarthikОценок пока нет
- P345 CortecДокумент7 страницP345 CortecHari Krishna.MОценок пока нет
- A New Approach To Arc Resistance CalculationДокумент7 страницA New Approach To Arc Resistance Calculationautomation vguardОценок пока нет
- Advanced Inverter Report 2013 FinalДокумент16 страницAdvanced Inverter Report 2013 FinalLaurence MichaelОценок пока нет
- Qualitrol-Hathaway DFR-1200 Master ProtocolДокумент14 страницQualitrol-Hathaway DFR-1200 Master ProtocolJOSEОценок пока нет
- 04 Fault CalculationsДокумент15 страниц04 Fault Calculationsapi-3750225100% (1)
- Breaker Manual PDFДокумент52 страницыBreaker Manual PDFNiraj YadavОценок пока нет
- Field Visit Report-132 KV TL Khar-August 05, 2019.Документ15 страницField Visit Report-132 KV TL Khar-August 05, 2019.Shehryar AfridiОценок пока нет
- B Detail:-2 (1:2) C: SF6 Gas Filling PointДокумент1 страницаB Detail:-2 (1:2) C: SF6 Gas Filling PointGabriel Maxo PapagalloОценок пока нет
- ETAP PowerLab 2012 Rev 9Документ2 страницыETAP PowerLab 2012 Rev 9Engr Rab Nawaz ButtОценок пока нет
- 41-P-135 (Earthing Platform)Документ6 страниц41-P-135 (Earthing Platform)RamzanОценок пока нет
- MS Thesis Final of Ubaid Ur Rehman "Post National Grid Reinforcement Analysis of QESCO Network For Reliable and Optimal Operation"Документ76 страницMS Thesis Final of Ubaid Ur Rehman "Post National Grid Reinforcement Analysis of QESCO Network For Reliable and Optimal Operation"ubaidОценок пока нет
- 1MRK505225-UEN B en Application Manual RED670 1.2Документ822 страницы1MRK505225-UEN B en Application Manual RED670 1.2jenskgОценок пока нет
- Bab III.2.1. Generator Sinkron (Lanjutan)Документ28 страницBab III.2.1. Generator Sinkron (Lanjutan)Hariz AudirahmawanОценок пока нет
- Substations - Volume X - GroundingДокумент52 страницыSubstations - Volume X - GroundingAbdul Wadood GharsheenОценок пока нет
- Sastec2 - Technical Offer - 220kv Gis JSPL - Angul - Rev CДокумент18 страницSastec2 - Technical Offer - 220kv Gis JSPL - Angul - Rev CRakesh Kumar Singh (Phase 1B)Оценок пока нет
- Lab 06-Differential Bus Bar ProtectionДокумент6 страницLab 06-Differential Bus Bar ProtectionAliza SharifОценок пока нет
- LTB E CB BrochureДокумент6 страницLTB E CB BrochureMidhun VargheseОценок пока нет
- KVMRT MMJV SBK SS05 Sysw Rep PDS 000089Документ349 страницKVMRT MMJV SBK SS05 Sysw Rep PDS 000089syafiqishamuddinОценок пока нет
- REB500 Relay PDFДокумент72 страницыREB500 Relay PDFmmsa100% (1)
- Technical Complementary Guide 2013Документ256 страницTechnical Complementary Guide 2013brightstardustОценок пока нет
- Electrical SafetyДокумент31 страницаElectrical SafetyDennis BallantyneОценок пока нет
- DRS-C2A PG 1 Function Library eДокумент214 страницDRS-C2A PG 1 Function Library eyuy060750% (2)
- General Description: Project: Mb#26 Perawang ProjectДокумент26 страницGeneral Description: Project: Mb#26 Perawang ProjectSurianshah shahОценок пока нет
- Synchroteq® Plus: Installation and WiringДокумент38 страницSynchroteq® Plus: Installation and WiringCô Nàng Song TửОценок пока нет
- P220 PDFДокумент12 страницP220 PDFSatya VasuОценок пока нет
- Standards For MV Switchgear Rated For Arc Flash Protection - ABBДокумент5 страницStandards For MV Switchgear Rated For Arc Flash Protection - ABB64107955Оценок пока нет
- RM6 ManualДокумент56 страницRM6 ManualMuhammed DemirОценок пока нет
- MRA1 - Trip Circuit Supervision: Manual MRA1 (Revision A)Документ20 страницMRA1 - Trip Circuit Supervision: Manual MRA1 (Revision A)Andrea MaurillaОценок пока нет
- 03 Transformers CT VTДокумент10 страниц03 Transformers CT VTEnrique G.Оценок пока нет
- Impedance Calculation of Cables Using Subdivision of The Cable ConductorsДокумент76 страницImpedance Calculation of Cables Using Subdivision of The Cable ConductorsOneil ZárateОценок пока нет
- Guaranteed Technical Particulars of Vacuum Interrupter Type Vg4-02 Equivalent To V-207 GBДокумент3 страницыGuaranteed Technical Particulars of Vacuum Interrupter Type Vg4-02 Equivalent To V-207 GBLalit SoniОценок пока нет
- Talebizadeh Sardari Keyvan Thesis 2018Документ92 страницыTalebizadeh Sardari Keyvan Thesis 2018pouyanОценок пока нет
- ACER Coursebook 2019 EnglishДокумент58 страницACER Coursebook 2019 Englishwiaedward353Оценок пока нет
- 0 SRM ControlДокумент299 страниц0 SRM ControlEduardo BittencourtОценок пока нет
- BorazjaniM2022m 1aДокумент100 страницBorazjaniM2022m 1aTolesa ShoreОценок пока нет
- Electrical Handbook Formula Book SampleДокумент54 страницыElectrical Handbook Formula Book SampleAliKaiser100% (1)
- P735 741 PDFДокумент7 страницP735 741 PDFSriram ramsОценок пока нет
- Otema 11Документ5 страницOtema 11Karthik ChennaiОценок пока нет
- Development and Implementation of A Microcontroller Based Remote Control of A Single Phase Induction Motor Using Radio Frequency Edited 1Документ12 страницDevelopment and Implementation of A Microcontroller Based Remote Control of A Single Phase Induction Motor Using Radio Frequency Edited 1Sriram ramsОценок пока нет
- Automatic Room Light Controller: Bidirectional Visitor Counter ". AbstractДокумент4 страницыAutomatic Room Light Controller: Bidirectional Visitor Counter ". AbstractSriram ramsОценок пока нет
- C 33Документ5 страницC 33Sriram ramsОценок пока нет
- 1 Wireless Power TransmissionДокумент27 страниц1 Wireless Power TransmissionSriram ramsОценок пока нет
- BluetoothДокумент33 страницыBluetoothSamraizTejaniОценок пока нет
- Electrical Engineering FormulasДокумент4 страницыElectrical Engineering Formulassanjay975Оценок пока нет
- PPTДокумент20 страницPPTSriram ramsОценок пока нет
- Carmel Polytechnic College: Poly FuseДокумент23 страницыCarmel Polytechnic College: Poly FuseSriram ramsОценок пока нет
- Wireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Документ9 страницWireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Sriram ramsОценок пока нет
- Seminar On: BluetoothДокумент18 страницSeminar On: BluetoothSriram ramsОценок пока нет
- 303 Sample-Chapter PDFДокумент39 страниц303 Sample-Chapter PDFRajveer ChittravanshiОценок пока нет
- Wireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Документ9 страницWireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Sriram ramsОценок пока нет
- Wireless: Power TransmissionДокумент27 страницWireless: Power TransmissionSriram ramsОценок пока нет
- 12bluetooth TechnologyДокумент21 страница12bluetooth TechnologySriram ramsОценок пока нет
- WWW SlidДокумент1 страницаWWW SlidSriram ramsОценок пока нет
- Wireless: Power TransmissionДокумент27 страницWireless: Power TransmissionSriram ramsОценок пока нет
- Abstract AshuДокумент1 страницаAbstract AshuSriram ramsОценок пока нет
- Wireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Документ9 страницWireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Sriram ramsОценок пока нет
- Wireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Документ9 страницWireless Power Transmission: Journal of Advanced Computing and Communication Technologies (ISSN: 2347 - 2804)Sriram ramsОценок пока нет
- Bluetooth Technology Seminar ReportДокумент24 страницыBluetooth Technology Seminar Reportx-robot100% (1)
- Untitled PresentationДокумент23 страницыUntitled PresentationSriram ramsОценок пока нет
- Ram InexДокумент7 страницRam InexSriram ramsОценок пока нет
- Ram InexДокумент7 страницRam InexSriram ramsОценок пока нет
- DevasenaДокумент65 страницDevasenaSriram ramsОценок пока нет
- Ram InexДокумент7 страницRam InexSriram ramsОценок пока нет
- Protection of GeneratorsДокумент87 страницProtection of GeneratorsTeja RamyaОценок пока нет
- Ceragon IP-20N IP-20A Installation Guide Rev H.02Документ101 страницаCeragon IP-20N IP-20A Installation Guide Rev H.02jorgeschmuklerОценок пока нет
- Ultra-Small, Low-Power, 16-Bit Analog-to-Digital Converter With Internal ReferenceДокумент36 страницUltra-Small, Low-Power, 16-Bit Analog-to-Digital Converter With Internal ReferenceSteven FlorezОценок пока нет
- BLL01 Memmert Waterbath WNB 10.enДокумент3 страницыBLL01 Memmert Waterbath WNB 10.enIvan Villena ChumanОценок пока нет
- Catalog - Loox (Iluminare Mobilier)Документ68 страницCatalog - Loox (Iluminare Mobilier)Paul AndreiОценок пока нет
- Matlab Simulink Model of Sinusoidal PWM For Three-Phase Voltage Source InverterДокумент3 страницыMatlab Simulink Model of Sinusoidal PWM For Three-Phase Voltage Source InverterEditor IJTSRDОценок пока нет
- Design of A Photovoltaic-Wind Hybrid PowerДокумент76 страницDesign of A Photovoltaic-Wind Hybrid PowerAwgichwAsefaОценок пока нет
- What'S New Inc37.113 - 2015, Ieee Guide For Protective Relay Applications To Transmission LinesДокумент36 страницWhat'S New Inc37.113 - 2015, Ieee Guide For Protective Relay Applications To Transmission LinesaryanОценок пока нет
- Cat Transferswitchsircom enДокумент4 страницыCat Transferswitchsircom enWira Nur IndrawanОценок пока нет
- Placa Fuji #1Документ14 страницPlaca Fuji #1robmeierОценок пока нет
- PES TP TR71 PSRC Microgrid 082019Документ58 страницPES TP TR71 PSRC Microgrid 082019A guitar la tocarraОценок пока нет
- Atlantis Restored or Links and Cycles. J B Leslie 1911Документ832 страницыAtlantis Restored or Links and Cycles. J B Leslie 1911reddclay95% (19)
- Servo Drive ManualДокумент82 страницыServo Drive ManualjovclsОценок пока нет
- Relay Burden - ABBДокумент2 страницыRelay Burden - ABBsrinivasaphanikiranОценок пока нет
- M800Документ6 страницM800receh ceritaОценок пока нет
- bq2415x Fully Integrated Switch-Mode One-Cell Li-Ion Charger With Full USB Compliance and USB-OTG SupportДокумент52 страницыbq2415x Fully Integrated Switch-Mode One-Cell Li-Ion Charger With Full USB Compliance and USB-OTG SupportJungkook JeonОценок пока нет
- Transformer ImpedenceДокумент3 страницыTransformer ImpedenceVIKRAM DESAIОценок пока нет
- GF-SAMXON Miniature Aluminum Electrolytic CapacitorsДокумент5 страницGF-SAMXON Miniature Aluminum Electrolytic CapacitorsIvan MarkovОценок пока нет
- GSM-900 Mobile JAMMER: EE592:Graduation ProjectДокумент31 страницаGSM-900 Mobile JAMMER: EE592:Graduation Projectjesirawi100% (1)
- Coleman 58032 Owners ManualДокумент12 страницColeman 58032 Owners Manual21st-Century-Goods.comОценок пока нет
- Calculation of Positive Sequence ImpedanceДокумент14 страницCalculation of Positive Sequence ImpedancesathiyaseelanОценок пока нет
- Fonte PWS-801Документ20 страницFonte PWS-801LuizОценок пока нет
- Reset Circuit of 8051 ControllerДокумент3 страницыReset Circuit of 8051 ControllerSuwilanji Joshua Chilongo100% (1)
- Repuestos Cavas. Planta PVC IIДокумент6 страницRepuestos Cavas. Planta PVC IIeiker rojasОценок пока нет
- Diodos EspecialesДокумент129 страницDiodos EspecialesEugenio NanniОценок пока нет
- ADD103B - Delphi - Folheto PDFДокумент2 страницыADD103B - Delphi - Folheto PDFLuiz Claudio Martins FreireОценок пока нет
- SIPROTEC Numerical Protection Relays - 2008 - A2 - en 1020 PageДокумент1 020 страницSIPROTEC Numerical Protection Relays - 2008 - A2 - en 1020 PageAbbas Divian100% (2)
- ANSI NEMA MG 1-2011 Motores y Generadores PDFДокумент642 страницыANSI NEMA MG 1-2011 Motores y Generadores PDFJhon Ayala100% (2)
- TransformerprotectionДокумент65 страницTransformerprotectionRK KОценок пока нет
- Rectangular Connectors: FCN360 SeriesДокумент32 страницыRectangular Connectors: FCN360 Seriespavan goyalОценок пока нет
- Service Manual: Viewsonic Vt2230-1MДокумент90 страницService Manual: Viewsonic Vt2230-1MDaniboy1994Оценок пока нет
- A Pathway to Decarbonise the Shipping Sector by 2050От EverandA Pathway to Decarbonise the Shipping Sector by 2050Оценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!От EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Оценок пока нет
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsОт EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsОценок пока нет
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressОт EverandNuclear Energy in the 21st Century: World Nuclear University PressРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsОт EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetОт EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetРейтинг: 2 из 5 звезд2/5 (1)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersОт EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceОт EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceОценок пока нет
- ISO 50001: A strategic guide to establishing an energy management systemОт EverandISO 50001: A strategic guide to establishing an energy management systemОценок пока нет
- Practical Reservoir Engineering and CharacterizationОт EverandPractical Reservoir Engineering and CharacterizationРейтинг: 4.5 из 5 звезд4.5/5 (3)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successОт EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerОт EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerОценок пока нет
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsОт EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Global Landscape of Renewable Energy FinanceОт EverandGlobal Landscape of Renewable Energy FinanceОценок пока нет
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsОт EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsОценок пока нет
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977От EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Оценок пока нет
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОт EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsОценок пока нет
- Recent Advances in Electrical Engineering: Applications OrientedОт EverandRecent Advances in Electrical Engineering: Applications OrientedОценок пока нет
- Industrial Waste Treatment HandbookОт EverandIndustrial Waste Treatment HandbookРейтинг: 5 из 5 звезд5/5 (1)