Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Invisible CitiesДокумент14 страницInvisible Citiesvelveteeny0% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- CBC Heo (Wheel Loader) NC IIДокумент58 страницCBC Heo (Wheel Loader) NC IIJohn JamesОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Quality Control of Rigid Pavements 1Документ58 страницQuality Control of Rigid Pavements 1pranjpatil100% (1)
- CII Sohrabji Godrej GreenДокумент30 страницCII Sohrabji Godrej GreenRITHANYAA100% (2)
- Project Quality Plan (JFJS-788)Документ18 страницProject Quality Plan (JFJS-788)mominОценок пока нет
- ..Product CatalogueДокумент56 страниц..Product Catalogue950 911Оценок пока нет
- 18-MCE-49 Lab Session 01Документ5 страниц18-MCE-49 Lab Session 01Waqar IbrahimОценок пока нет
- 19 Dark PPT TemplateДокумент15 страниц19 Dark PPT TemplateKurt W. DelleraОценок пока нет
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationДокумент6 страницHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiОценок пока нет
- World War II D-Day Invasion by SlidesgoДокумент55 страницWorld War II D-Day Invasion by SlidesgoPreston SandsОценок пока нет
- The Turning Circle of VehiclesДокумент2 страницыThe Turning Circle of Vehiclesanon_170098985Оценок пока нет
- Precursor Effects of Citric Acid and Citrates On Zno Crystal FormationДокумент7 страницPrecursor Effects of Citric Acid and Citrates On Zno Crystal FormationAlv R GraciaОценок пока нет
- Optimized Maximum Power Point Tracker For Fast Changing Environmental ConditionsДокумент7 страницOptimized Maximum Power Point Tracker For Fast Changing Environmental ConditionsSheri ShahiОценок пока нет
- CFD Turbina Michell BankiДокумент11 страницCFD Turbina Michell BankiOscar Choque JaqquehuaОценок пока нет
- Subject OrientationДокумент15 страницSubject OrientationPearl OgayonОценок пока нет
- Industrial ExperienceДокумент30 страницIndustrial ExperienceThe GridLockОценок пока нет
- Lab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroДокумент3 страницыLab 3 Arduino Led Candle Light: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroGladys Ruth PaypaОценок пока нет
- RARE Manual For Training Local Nature GuidesДокумент91 страницаRARE Manual For Training Local Nature GuidesenoshaugustineОценок пока нет
- SafetyRelay CR30Документ3 страницыSafetyRelay CR30Luis GuardiaОценок пока нет
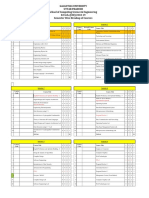
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesДокумент2 страницыGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiОценок пока нет
- Enlightened ExperimentationДокумент8 страницEnlightened ExperimentationRaeed HassanОценок пока нет
- 3D Printing & Embedded ElectronicsДокумент7 страниц3D Printing & Embedded ElectronicsSantiago PatitucciОценок пока нет
- Been There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerДокумент8 страницBeen There, Done That, Wrote The Blog: The Choices and Challenges of Supporting Adolescents and Young Adults With CancerNanis DimmitrisОценок пока нет
- The Linguistic Colonialism of EnglishДокумент4 страницыThe Linguistic Colonialism of EnglishAdriana MirandaОценок пока нет
- Trina 440W Vertex-S+ DatasheetДокумент2 страницыTrina 440W Vertex-S+ DatasheetBrad MannОценок пока нет
- Applying For A Job: Pre-ReadingДокумент5 страницApplying For A Job: Pre-ReadingDianitta MaciasОценок пока нет
- CHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)Документ64 страницыCHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)kriti madhokОценок пока нет
- Test Bank For Psychology 6th Edition Don HockenburyДокумент18 страницTest Bank For Psychology 6th Edition Don HockenburyKaitlynMorganarwp100% (42)
- Diogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFДокумент54 страницыDiogenes Laertius-Book 10 - Epicurus - Tomado de Lives of The Eminent Philosophers (Oxford, 2018) PDFAndres Felipe Pineda JaimesОценок пока нет
- Introduction To EthicsДокумент18 страницIntroduction To EthicsMarielle Guerra04Оценок пока нет