Вам также может понравиться
- Control Circuit Transformers: Technical DataДокумент44 страницыControl Circuit Transformers: Technical Dataluis fernandoОценок пока нет
- ACS550-01-03A3-4: General Purpose Drive Module, ACS550Документ3 страницыACS550-01-03A3-4: General Purpose Drive Module, ACS550luis fernandoОценок пока нет
- Solar Charge Controller: Solar Car Solar Home Solar Backpack Solar Boat Solar Street Light Solar Power GeneratorДокумент4 страницыSolar Charge Controller: Solar Car Solar Home Solar Backpack Solar Boat Solar Street Light Solar Power Generatorluis fernandoОценок пока нет
- Schneider Electric Industries: Date: Wednesday, March 9, 2022Документ2 страницыSchneider Electric Industries: Date: Wednesday, March 9, 2022luis fernandoОценок пока нет
- Schneider Electric Industries: Date: Wednesday, March 9, 2022Документ2 страницыSchneider Electric Industries: Date: Wednesday, March 9, 2022luis fernandoОценок пока нет
- Synchronization of Multi-Agent Systems Using Event-Triggered and Self-Triggered BroadcastsДокумент6 страницSynchronization of Multi-Agent Systems Using Event-Triggered and Self-Triggered Broadcastsluis fernandoОценок пока нет
- Thinking Out Loud - Ed SheeranДокумент2 страницыThinking Out Loud - Ed Sheeranluis fernandoОценок пока нет
- Codigo Asignatura Departamento Cred: Total T Ptplhoras H SemanaДокумент3 страницыCodigo Asignatura Departamento Cred: Total T Ptplhoras H Semanaluis fernandoОценок пока нет
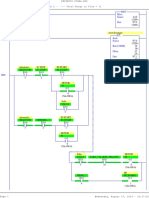
- 0000 MOV Move Source Dest MOVДокумент2 страницы0000 MOV Move Source Dest MOVluis fernandoОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- EEB441-511 LE01-CH03 Modeling in The Time Domain 2023 PDFДокумент50 страницEEB441-511 LE01-CH03 Modeling in The Time Domain 2023 PDFLoniel LuxОценок пока нет
- State Space Behaviours 7 - Discrete SystemsДокумент15 страницState Space Behaviours 7 - Discrete SystemsMuhammad IrfanОценок пока нет
- An Introduction To Digital Control Systems - Tutorial: ResearchДокумент21 страницаAn Introduction To Digital Control Systems - Tutorial: ResearchNahomОценок пока нет
- Briefguidetrc3600 Mae3408 s2 2018Документ3 страницыBriefguidetrc3600 Mae3408 s2 2018Dan DMОценок пока нет
- DynДокумент475 страницDynMuhammad Ridho DewantoОценок пока нет
- Exp of DSPДокумент148 страницExp of DSPShadharon_MeyeОценок пока нет
- (Peter Van Overschee, Bart de Moor (Auth.) ) SubsДокумент262 страницы(Peter Van Overschee, Bart de Moor (Auth.) ) SubsMarcos HenriqueОценок пока нет
- Coker UnitДокумент15 страницCoker UnitAhmed YousryОценок пока нет
- RMP v065 p1331Документ62 страницыRMP v065 p1331buddy72Оценок пока нет
- Matlab TutorialДокумент66 страницMatlab TutorialRohan MalkarОценок пока нет
- PSD SyllabusДокумент2 страницыPSD SyllabusChristopher OrtegaОценок пока нет
- Mechatronic Systems: Concepts and Applications: R. IsermannДокумент27 страницMechatronic Systems: Concepts and Applications: R. Isermannmauricio187Оценок пока нет
- PHD DissertationДокумент197 страницPHD DissertationLennin GalvezОценок пока нет
- Gretl Guide (351 400)Документ50 страницGretl Guide (351 400)Taha NajidОценок пока нет
- Ebooksclub Org Process Dynamics Modeling and Control Topics in Chemical EngineeringДокумент1 281 страницаEbooksclub Org Process Dynamics Modeling and Control Topics in Chemical Engineeringanaid_hope100% (1)
- Exercises in Nonlinear Control SystemsДокумент115 страницExercises in Nonlinear Control SystemsGin NervaОценок пока нет
- Model Predictive Control of An Inverter With OutpuДокумент10 страницModel Predictive Control of An Inverter With OutpusureshОценок пока нет
- Mitigation Stick SlipДокумент6 страницMitigation Stick SlipCarlos SensanoОценок пока нет
- ( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of EngineeringДокумент2 страницы( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of Engineeringkrushnasamy subramaniyanОценок пока нет
- PIEAS Course Outline For MS System EngineeringДокумент20 страницPIEAS Course Outline For MS System EngineeringwaqasahmadzОценок пока нет
- Nonlinear Control Systems 1. - Introduction To Nonlinear SystemsДокумент54 страницыNonlinear Control Systems 1. - Introduction To Nonlinear SystemsGech ManОценок пока нет
- Automatic Control: Instructor Name: Dr. Anil Kumar Institute: IIT RoorkeeДокумент1 страницаAutomatic Control: Instructor Name: Dr. Anil Kumar Institute: IIT RoorkeeAnup ChauhanОценок пока нет
- Problems Problem Space Search Defining The Problem As State Space SearchДокумент16 страницProblems Problem Space Search Defining The Problem As State Space SearchJAYANTA GHOSHОценок пока нет
- Boeing 747 - Aerodynamic AnalysisДокумент59 страницBoeing 747 - Aerodynamic AnalysisJeannine Harrison100% (1)
- DCS AssignmentsДокумент11 страницDCS AssignmentsRavi TejaОценок пока нет
- Robot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Документ2 страницыRobot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Layla VuОценок пока нет
- Nonlinear Control and Servo Systems: Giacomo Como, 2014Документ47 страницNonlinear Control and Servo Systems: Giacomo Como, 2014Sachin ShendeОценок пока нет
- Ch.12 Design Via State Space - AssignmentДокумент2 страницыCh.12 Design Via State Space - AssignmentTam PhamОценок пока нет