Вам также может понравиться
- Preface: Ij J IДокумент4 страницыPreface: Ij J IFrancisco CarvalhoОценок пока нет
- 1997-Airplane Aerodynamics & Performance-1st Ed.-J. Roskam & C.T.E. Lan - PDF (ERRATA)Документ12 страниц1997-Airplane Aerodynamics & Performance-1st Ed.-J. Roskam & C.T.E. Lan - PDF (ERRATA)sayyed bassir ajellehОценок пока нет
- Module 3 - Solutions of The Diffusivity EquationДокумент13 страницModule 3 - Solutions of The Diffusivity EquationMuhammad Umair AliОценок пока нет
- Comcor PDFДокумент4 страницыComcor PDFWallace WyattОценок пока нет
- A First Course in Modular Forms: Corrections To The Fourth PrintingДокумент5 страницA First Course in Modular Forms: Corrections To The Fourth Printing袁浩洋Оценок пока нет
- Errors (Mostly Typos) and Corrections Are Shown in Blue ColorsДокумент3 страницыErrors (Mostly Typos) and Corrections Are Shown in Blue ColorsMahmoudKhedrОценок пока нет
- (Chris Doran, Anthony Lasenby) Geometric Algebra F PDFДокумент6 страниц(Chris Doran, Anthony Lasenby) Geometric Algebra F PDFOctavianus Julianto SamanОценок пока нет
- Advance Level ProblemsДокумент1 страницаAdvance Level ProblemsShivam VarshneyОценок пока нет
- ERRATA For "A First Course in Abstract Algebra," 2nd Ed., J. RotmanДокумент12 страницERRATA For "A First Course in Abstract Algebra," 2nd Ed., J. Rotmanaloha_wirelessОценок пока нет
- AA HL TrigДокумент55 страницAA HL Trigrajugauli79Оценок пока нет
- Series de PuseuixДокумент13 страницSeries de PuseuixGabrielBenícioОценок пока нет
- 24-06-2022-1656059066-6-.-7. Engg - Star-in-Coloring of Theta and Plus GraphsДокумент12 страниц24-06-2022-1656059066-6-.-7. Engg - Star-in-Coloring of Theta and Plus GraphsImpact JournalsОценок пока нет
- Matlab ProblemsДокумент12 страницMatlab Problemsganesh naidu dasariОценок пока нет
- ST326 - Irdap2021Документ5 страницST326 - Irdap2021NgaNovaОценок пока нет
- 10.450 Process Dynamics, Operations, and Control Lecture Notes - 3 Lesson 3. Math Review. 3.0 ContextДокумент9 страниц10.450 Process Dynamics, Operations, and Control Lecture Notes - 3 Lesson 3. Math Review. 3.0 Contextse781Оценок пока нет
- Exam June 2008 Problems and SolutionsДокумент9 страницExam June 2008 Problems and Solutionssy.buitienОценок пока нет
- Mathematical Tripos: at The End of The ExaminationДокумент27 страницMathematical Tripos: at The End of The ExaminationDedliОценок пока нет
- Formula Sheet NumericalДокумент3 страницыFormula Sheet NumericalZain BhinderОценок пока нет
- PHYS 381 W23 Assignment 4Документ8 страницPHYS 381 W23 Assignment 4Nathan NgoОценок пока нет
- HW12 SolutionДокумент10 страницHW12 SolutionGabino CoronaОценок пока нет
- Homework2 2023Документ2 страницыHomework2 2023Sameer NaguibОценок пока нет
- Ugmath2019 Solutions PDFДокумент5 страницUgmath2019 Solutions PDFVaibhav BajpaiОценок пока нет
- Ug MathsДокумент5 страницUg MathsMayank PrakashОценок пока нет
- Quiz 07int Romberg SolutionДокумент9 страницQuiz 07int Romberg SolutionErnesto Vergara Jr.Оценок пока нет
- CorrДокумент6 страницCorrchrisОценок пока нет
- CSE 5311 Homework 1 Solution: Problem 2.2-1Документ8 страницCSE 5311 Homework 1 Solution: Problem 2.2-1tilahun0% (1)
- Math 55 - Finals SamplexДокумент1 страницаMath 55 - Finals SamplexEdrien Dominick OfinaОценок пока нет
- 6.6 (Barello)Документ2 страницы6.6 (Barello)buildwithlegos23Оценок пока нет
- Correcciones Zettili 2009Документ20 страницCorrecciones Zettili 2009artsanxОценок пока нет
- Errata PDFДокумент5 страницErrata PDFManar HosnyОценок пока нет
- PC235W13 Assignment5 SolutionsДокумент10 страницPC235W13 Assignment5 SolutionskwokОценок пока нет
- MIT18 S096F13 Pset4Документ7 страницMIT18 S096F13 Pset4TheoОценок пока нет
- ErrataДокумент3 страницыErrataZak BelОценок пока нет
- Bat Dang Thuc Luong GiacДокумент8 страницBat Dang Thuc Luong Giacapi-19473489Оценок пока нет
- Discussion Section of 1/23/13: 1.1 Expected Value and VarianceДокумент7 страницDiscussion Section of 1/23/13: 1.1 Expected Value and VarianceVishak MuthukumarОценок пока нет
- Poisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DДокумент6 страницPoisson's Equation by The FEM Using A MATLAB Mesh Generator: 4u F U 0 On DRuben Dario Guerrero EОценок пока нет
- 127 - PR 02 - Decay of A Scalar ParticleДокумент7 страниц127 - PR 02 - Decay of A Scalar ParticleBradley NartowtОценок пока нет
- Problem Set 1Документ3 страницыProblem Set 1Keanu BellamyОценок пока нет
- SpcontДокумент85 страницSpcontCharles AmorimОценок пока нет
- ch8 ProbsДокумент4 страницыch8 ProbsEkrem GüldesteОценок пока нет
- ECE216H1 2022 SolutionДокумент4 страницыECE216H1 2022 SolutionhcxОценок пока нет
- Analysis of Solid FuelsДокумент2 страницыAnalysis of Solid FuelsJaniel Arlan OmboyОценок пока нет
- DandcДокумент46 страницDandcNhi NhiОценок пока нет
- Mathematical Tripos: at The End of The ExaminationДокумент28 страницMathematical Tripos: at The End of The ExaminationDedliОценок пока нет
- ErrataДокумент5 страницErrataRicardo Malo WalkerОценок пока нет
- 1P1F Complex Algebra: 3i (4+i) iθ iθ iyДокумент6 страниц1P1F Complex Algebra: 3i (4+i) iθ iθ iyGharib MahmoudОценок пока нет
- Solution For Final Examination: (2.0 Marks)Документ4 страницыSolution For Final Examination: (2.0 Marks)Tùng HoàngОценок пока нет
- Joseph - Thomas - Yr 13 P34 AssignmentДокумент22 страницыJoseph - Thomas - Yr 13 P34 AssignmentHana SaleemОценок пока нет
- Corrections To Problems in "Intro. To Analysis" (Mattuck), Printings 1-7Документ3 страницыCorrections To Problems in "Intro. To Analysis" (Mattuck), Printings 1-7Lucas DutraОценок пока нет
- Mathematical Tripos: at The End of The ExaminationДокумент28 страницMathematical Tripos: at The End of The ExaminationDedliОценок пока нет
- Introduction To Random Matrices 3140815 Corrections ErrataДокумент5 страницIntroduction To Random Matrices 3140815 Corrections ErrataSrinivasaОценок пока нет
- Statistical Physics CorrectionsДокумент3 страницыStatistical Physics CorrectionsSanaОценок пока нет
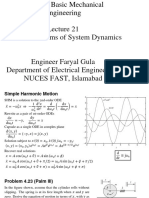
- Lecture 21Документ12 страницLecture 21I190845 Samana NayyabОценок пока нет
- Script 1011 WaveДокумент10 страницScript 1011 Wavetanvir04104Оценок пока нет
- Engineering Electromagnetics 8th Edition Hayt Solutions ManualДокумент15 страницEngineering Electromagnetics 8th Edition Hayt Solutions Manualreginasellersxsygkmfczw100% (11)
- Complete Instructor Resources With Solution Manual, Solutions ToДокумент211 страницComplete Instructor Resources With Solution Manual, Solutions Tohesham alhelaleeОценок пока нет
- Numerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)Документ14 страницNumerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)DANIEL ALEJANDRO VARGAS UZURIAGAОценок пока нет
- Sine GordonДокумент7 страницSine GordondinchiiОценок пока нет
- NSER Poster-StephenДокумент1 страницаNSER Poster-StephenrathanОценок пока нет
- Sensor Placement Optimization and Damage Identification in A Fuselage Structure Using Inverse Modal Problem and Firefly AlgorithmДокумент21 страницаSensor Placement Optimization and Damage Identification in A Fuselage Structure Using Inverse Modal Problem and Firefly AlgorithmrathanОценок пока нет
- DM34Документ9 страницDM34rathanОценок пока нет
- Hübler 2018 J. Phys. Conf. Ser. 1037 032035Документ12 страницHübler 2018 J. Phys. Conf. Ser. 1037 032035rathanОценок пока нет
- How To Easily Create An Arbitrary Waveform Without ProgrammingДокумент7 страницHow To Easily Create An Arbitrary Waveform Without ProgrammingAnonymous YffydbOYDeОценок пока нет
- Vector Getting Started R06Документ70 страницVector Getting Started R06rathanОценок пока нет
- SignalStar User Manual R14Документ545 страницSignalStar User Manual R14rathanОценок пока нет
- Brandt Chapt 8Документ7 страницBrandt Chapt 8rathanОценок пока нет
- Instructions Installing The SoftwareДокумент1 страницаInstructions Installing The SoftwarejeroldscdОценок пока нет
- NotesДокумент73 страницыNotesrathanОценок пока нет
- Book Problem Solutions Separate PagesДокумент121 страницаBook Problem Solutions Separate PagesrathanОценок пока нет
- Noise and Vibration AnalysisДокумент3 страницыNoise and Vibration AnalysisrathanОценок пока нет
- ME 207 - Chapter 6 - P2Документ14 страницME 207 - Chapter 6 - P2Wahidur Rahman RafsanОценок пока нет
- 4 Review Response Arbitrary ExcitationДокумент17 страниц4 Review Response Arbitrary ExcitationTanay ChoudharyОценок пока нет
- Gyroscopic EffectsДокумент28 страницGyroscopic EffectsrathanОценок пока нет
- Engineering Mechanics by S K MondalДокумент37 страницEngineering Mechanics by S K MondalSambasivarao PerumallaОценок пока нет
- ME 207 - Chapter 1 - P2Документ25 страницME 207 - Chapter 1 - P2rathanОценок пока нет
- ME 207 - Chapter 5 - P2Документ9 страницME 207 - Chapter 5 - P2rathanОценок пока нет
- ME 207 - Chapter 3 - P2Документ14 страницME 207 - Chapter 3 - P2rathanОценок пока нет
- Vibration Measurementing Equipments and Signal ProcessingДокумент158 страницVibration Measurementing Equipments and Signal ProcessingJose PradoОценок пока нет
- StplabdivДокумент2 страницыStplabdivrathanОценок пока нет
- Basics of Experimental Modal Analysis: C.SujathaДокумент84 страницыBasics of Experimental Modal Analysis: C.SujatharathanОценок пока нет
- Matlab Random WavesДокумент185 страницMatlab Random WavesAlexis LopezОценок пока нет
- StrlabДокумент2 страницыStrlabrathanОценок пока нет
- Experiment Reading Table PDFДокумент1 страницаExperiment Reading Table PDFrathanОценок пока нет
- StplabconДокумент2 страницыStplabconrathanОценок пока нет
- Mass Flow Rate V/s RPM For Various Input Pressure - Straight Labyrinth SealДокумент2 страницыMass Flow Rate V/s RPM For Various Input Pressure - Straight Labyrinth SealrathanОценок пока нет
- Bamboo BeamДокумент1 страницаBamboo BeamrathanОценок пока нет
- Shock and Vibration Signal AnalysisДокумент106 страницShock and Vibration Signal AnalysisMichaelОценок пока нет
- Entrepreneur: Job/Career InvolvementДокумент5 страницEntrepreneur: Job/Career InvolvementYlaissa GeronimoОценок пока нет
- In Partial Fulfillment of The Requirements in Care of Older Adult (NCM 114)Документ2 страницыIn Partial Fulfillment of The Requirements in Care of Older Adult (NCM 114)Karen TangОценок пока нет
- Plastique: Art and EducationДокумент7 страницPlastique: Art and EducationJackStevensonОценок пока нет
- India Marine Insurance Act 1963Документ21 страницаIndia Marine Insurance Act 1963Aman GroverОценок пока нет
- Unit 2-ED (Theory)Документ13 страницUnit 2-ED (Theory)chakramuОценок пока нет
- Saptamsa - D7Документ4 страницыSaptamsa - D7Nabeel IrfanОценок пока нет
- Aìgas of Bhakti. at The End of The Last Chapter Uddhava Inquired AboutДокумент28 страницAìgas of Bhakti. at The End of The Last Chapter Uddhava Inquired AboutDāmodar DasОценок пока нет
- Rectification or Correction of Sale DeedДокумент4 страницыRectification or Correction of Sale Deedsumanth_0678Оценок пока нет
- Class 12 Accountancy HHДокумент58 страницClass 12 Accountancy HHkomal barotОценок пока нет
- Ubi Jus Ibi RemediumДокумент9 страницUbi Jus Ibi RemediumUtkarsh JaniОценок пока нет
- Registration - No Candidate Gender Category Rank/Percentage Allotment - Seat Base - Seat Course CollegeДокумент166 страницRegistration - No Candidate Gender Category Rank/Percentage Allotment - Seat Base - Seat Course CollegeCyber ParkОценок пока нет
- Dopamine What It Is, Function & SymptomsДокумент7 страницDopamine What It Is, Function & SymptomsRaj KumarОценок пока нет
- Excellent Inverters Operation Manual: We Are Your Excellent ChoiceДокумент71 страницаExcellent Inverters Operation Manual: We Are Your Excellent ChoicephaPu4cuОценок пока нет
- INTRODUCTIONДокумент1 страницаINTRODUCTIONNabila Gaming09Оценок пока нет
- Navamsa Karma and GodДокумент9 страницNavamsa Karma and GodVisti Larsen50% (2)
- Baltimore Catechism No. 2 (Of 4)Документ64 страницыBaltimore Catechism No. 2 (Of 4)gogelОценок пока нет
- Ministry of Truth Big Brother Watch 290123Документ106 страницMinistry of Truth Big Brother Watch 290123Valentin ChirilaОценок пока нет
- 50 p7 Kids AvikdeДокумент2 страницы50 p7 Kids AvikdebankansОценок пока нет
- Entity-Level Controls Fraud QuestionnaireДокумент8 страницEntity-Level Controls Fraud QuestionnaireKirby C. LoberizaОценок пока нет
- Character Formation 1: Nationalism and PatriotismДокумент11 страницCharacter Formation 1: Nationalism and Patriotismban diaz100% (1)
- Contracts ChecklistДокумент3 страницыContracts ChecklistSteve WatmoreОценок пока нет
- Organigation DeveДокумент3 страницыOrganigation Devemerin sunilОценок пока нет
- Reading İzmir Culture Park Through Women S Experiences Matinee Practices in The 1970s Casino SpacesДокумент222 страницыReading İzmir Culture Park Through Women S Experiences Matinee Practices in The 1970s Casino SpacesAta SagirogluОценок пока нет
- 07 Lejano vs. People (95 PAGES!)Документ95 страниц07 Lejano vs. People (95 PAGES!)noonalawОценок пока нет
- Flow ChemistryДокумент6 страницFlow Chemistryrr1819Оценок пока нет
- Muller-Lyer IllusionДокумент3 страницыMuller-Lyer Illusionsara VermaОценок пока нет
- PsychFirstAidSchools PDFДокумент186 страницPsychFirstAidSchools PDFAna ChicasОценок пока нет
- JURDING (Corticosteroids Therapy in Combination With Antibiotics For Erysipelas)Документ21 страницаJURDING (Corticosteroids Therapy in Combination With Antibiotics For Erysipelas)Alif Putri YustikaОценок пока нет
- Amor Vs FlorentinoДокумент17 страницAmor Vs FlorentinoJessica BernardoОценок пока нет
- International Conference On Basic Science (ICBS)Документ22 страницыInternational Conference On Basic Science (ICBS)repositoryIPBОценок пока нет