Вам также может понравиться
- Breve Historia de La Seguridad Industrial Desde La Edad Media Hasta HoyДокумент7 страницBreve Historia de La Seguridad Industrial Desde La Edad Media Hasta HoyFRANCISCO ORTEGA GARZONОценок пока нет
- Valor Del Dinero en El Tiempo - Ingenieria EconomicaДокумент8 страницValor Del Dinero en El Tiempo - Ingenieria EconomicaFRANCISCO ORTEGA GARZONОценок пока нет
- La Seguridad IndustrialДокумент16 страницLa Seguridad IndustrialFRANCISCO ORTEGA GARZONОценок пока нет
- Enfoque de Vulnerabilidad Social para Investigar Las Desventajas SocioambientalesДокумент28 страницEnfoque de Vulnerabilidad Social para Investigar Las Desventajas SocioambientalesFRANCISCO ORTEGA GARZONОценок пока нет
- Frog S2a2Документ12 страницFrog S2a2FRANCISCO ORTEGA GARZONОценок пока нет
- Frog S4a1Документ5 страницFrog S4a1FRANCISCO ORTEGA GARZONОценок пока нет
- Peap S4a2Документ5 страницPeap S4a2FRANCISCO ORTEGA GARZONОценок пока нет
- Frog S5a1Документ18 страницFrog S5a1FRANCISCO ORTEGA GARZONОценок пока нет
- Foro S4Документ2 страницыForo S4FRANCISCO ORTEGA GARZONОценок пока нет
- Sesion 5 UNIDEPДокумент2 страницыSesion 5 UNIDEPFRANCISCO ORTEGA GARZONОценок пока нет
- Ingeniería Económica Concepto, AplicДокумент33 страницыIngeniería Económica Concepto, AplicJuan Robinson Rodriguez NavarroОценок пока нет
- Sesion 5 UNIDEPДокумент2 страницыSesion 5 UNIDEPFRANCISCO ORTEGA GARZONОценок пока нет
- Grupos en Situacion de Vulnerabilidad PDFДокумент66 страницGrupos en Situacion de Vulnerabilidad PDFJavier MontielОценок пока нет
- Proyecto AdriДокумент13 страницProyecto AdriFRANCISCO ORTEGA GARZONОценок пока нет
- Frog S1a1Документ27 страницFrog S1a1FRANCISCO ORTEGA GARZONОценок пока нет
- Peap S3a1Документ3 страницыPeap S3a1FRANCISCO ORTEGA GARZONОценок пока нет
- Algoritmo de DijkstraДокумент8 страницAlgoritmo de DijkstraFRANCISCO ORTEGA GARZONОценок пока нет
- Frog S5a1Документ23 страницыFrog S5a1FRANCISCO ORTEGA GARZONОценок пока нет
- Amorsh S4a1Документ2 страницыAmorsh S4a1FRANCISCO ORTEGA GARZONОценок пока нет
- El Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1Документ12 страницEl Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1FRANCISCO ORTEGA GARZONОценок пока нет
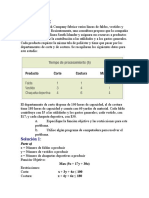
- Problema 1Документ2 страницыProblema 1FRANCISCO ORTEGA GARZONОценок пока нет
- Problema 2Документ2 страницыProblema 2FRANCISCO ORTEGA GARZON50% (2)
- Bienes y ServiciosДокумент17 страницBienes y ServiciosFRANCISCO ORTEGA GARZONОценок пока нет
- Problema 3Документ2 страницыProblema 3FRANCISCO ORTEGA GARZONОценок пока нет
- El Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1Документ12 страницEl Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1FRANCISCO ORTEGA GARZONОценок пока нет
- Método Simplex Paso A PasoДокумент15 страницMétodo Simplex Paso A PasoFRANCISCO ORTEGA GARZONОценок пока нет
- El Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1Документ12 страницEl Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada Pas1FRANCISCO ORTEGA GARZONОценок пока нет
- Método Simplex Paso A PasoДокумент15 страницMétodo Simplex Paso A PasoFRANCISCO ORTEGA GARZONОценок пока нет
- El Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada PasoДокумент9 страницEl Método Simplex Es Un Procedimiento Iterativo Que Permite Mejorar La Solución de La Función Objetivo en Cada PasoFrancisco LeytonОценок пока нет
- Libro Rojo de Flora AmenazadaДокумент600 страницLibro Rojo de Flora AmenazadaJehan Ninon RiosОценок пока нет
- Manual Curso Psicologia de La CiaДокумент24 страницыManual Curso Psicologia de La CiaMargarita BenvenutoОценок пока нет
- Reología pulpas metalúrgicasДокумент5 страницReología pulpas metalúrgicasJULIUS JELIUSОценок пока нет
- Deuda PublicaДокумент4 страницыDeuda PublicaCris_Mayen2608Оценок пока нет
- Informe Manual de SeñalizaciónДокумент26 страницInforme Manual de SeñalizaciónCristian MendozaОценок пока нет
- Repasa - Sustantivos, Adjetivos Determinantes, Pronombres. Acentuación y Lenguaje Denotativo y ConnotativoДокумент3 страницыRepasa - Sustantivos, Adjetivos Determinantes, Pronombres. Acentuación y Lenguaje Denotativo y ConnotativoIzan Lorenzo RiquelmeОценок пока нет
- Practina N°1. Sistema de Generación de FríoДокумент23 страницыPractina N°1. Sistema de Generación de FríoLiliana Llaure HuingoОценок пока нет
- Historia de La EmpresaДокумент3 страницыHistoria de La EmpresaJuan Esteban Castro MenaОценок пока нет
- Beneficios Del Ganoderma Lucidum en El SiiДокумент18 страницBeneficios Del Ganoderma Lucidum en El SiiRosa Maria Fernandez PaezОценок пока нет
- El Fantasma Enamorado - Jonathan CarrollДокумент476 страницEl Fantasma Enamorado - Jonathan CarrollSamantha Rojas GuzmanОценок пока нет
- Can FDДокумент6 страницCan FDnicolas pugaОценок пока нет
- Tratamiento de FangosДокумент31 страницаTratamiento de FangosDani RedondoОценок пока нет
- Programa Aulas Emocionalmente Seguras: Una Apuesta Por Fortalecer La Docencia Desde Lo HumanoДокумент14 страницPrograma Aulas Emocionalmente Seguras: Una Apuesta Por Fortalecer La Docencia Desde Lo HumanoHakuna MatataОценок пока нет
- AlfareríaДокумент7 страницAlfareríaBrigitte RamirezОценок пока нет
- Memorias SemiconductorasДокумент2 страницыMemorias SemiconductorasJose MartinezОценок пока нет
- LACTEOSДокумент23 страницыLACTEOSNatali Flores TiburcioОценок пока нет
- Evaluacion de La Inducción GeneralДокумент2 страницыEvaluacion de La Inducción GeneraldonaxtaОценок пока нет
- Matriz de Marco Lógico Proyecto de Actividad FísicaДокумент9 страницMatriz de Marco Lógico Proyecto de Actividad FísicaAlejandro Ortega HurtadoОценок пока нет
- 7 Acciones en Seguridad VialДокумент6 страниц7 Acciones en Seguridad VialWilson GarciaОценок пока нет
- Análisis Estático MarcosДокумент23 страницыAnálisis Estático MarcosFernanda PeñalozaОценок пока нет
- 280601052.corregir Fallas y Averías de Los Sistemas Componentes de Las Motocicletas de Acuerdo Con Parámetros y Procedimientos Del Fabricante y NormatividДокумент6 страниц280601052.corregir Fallas y Averías de Los Sistemas Componentes de Las Motocicletas de Acuerdo Con Parámetros y Procedimientos Del Fabricante y Normatividdaiver lopez padilla0% (1)
- IC531 12sanchezДокумент11 страницIC531 12sanchezMd. Mominul IslamОценок пока нет
- Vdocuments - Es Maintenance Sandvik LH 410Документ87 страницVdocuments - Es Maintenance Sandvik LH 410Francisco GutierrezОценок пока нет
- SOLDADURAДокумент27 страницSOLDADURAEddy RolanОценок пока нет
- Monografía EmprendimientoДокумент20 страницMonografía EmprendimientoChristian Vicente Arzapalo IncheОценок пока нет
- Harnois 14.40Документ5 страницHarnois 14.40Refáél Hernández GutiérrezОценок пока нет
- Manual Concoa PDFДокумент4 страницыManual Concoa PDFMonica MezaОценок пока нет
- Hospital Geriátrico Plan de Negocios Estudio Técnico-AmbientalДокумент5 страницHospital Geriátrico Plan de Negocios Estudio Técnico-AmbientalAlfredo MogaОценок пока нет
- Tecnología-Informática 3 - 4Документ5 страницTecnología-Informática 3 - 4Mateo CarpioОценок пока нет
- Chimenea Solar - ProyectoДокумент10 страницChimenea Solar - ProyectoDANIEL FOQUITAОценок пока нет