Вам также может понравиться
- Propagator Greens Function in Quantum MeДокумент3 страницыPropagator Greens Function in Quantum Metoby122Оценок пока нет
- Stat 212 April 10 NotesДокумент3 страницыStat 212 April 10 NotesAlan ChungОценок пока нет
- MSexam Stat 2019S SolutionsДокумент11 страницMSexam Stat 2019S SolutionsRobinson Ortega MezaОценок пока нет
- 2022 2023midtermДокумент3 страницы2022 2023midtermCyber AlphaОценок пока нет
- MSexam Stat 2016S SolutionДокумент11 страницMSexam Stat 2016S SolutionRobinson Ortega MezaОценок пока нет
- Pi Hua1991Документ5 страницPi Hua1991madanifateh1984Оценок пока нет
- Hw1sol PDFДокумент9 страницHw1sol PDFRohit BhadauriaОценок пока нет
- Master’s Written Examination Fall 2019Документ11 страницMaster’s Written Examination Fall 2019Robinson Ortega MezaОценок пока нет
- Exact and Approximate Expressions For The Period of Anharmonic OscillatorsДокумент11 страницExact and Approximate Expressions For The Period of Anharmonic OscillatorsjeremyОценок пока нет
- Equi-Statistical Convergence Korovkin TheoremДокумент12 страницEqui-Statistical Convergence Korovkin TheoremYiğit ErpakОценок пока нет
- Lognormal Model For Stock Prices: Michael J. Sharpe Mathematics Department, UcsdДокумент9 страницLognormal Model For Stock Prices: Michael J. Sharpe Mathematics Department, UcsdRaymondОценок пока нет
- Master's Written Examination and SolutionДокумент14 страницMaster's Written Examination and SolutionRobinson Ortega MezaОценок пока нет
- Mathematical Modeling and Computation in FinanceДокумент3 страницыMathematical Modeling and Computation in FinanceĐạo Ninh ViệtОценок пока нет
- MSexam Stat 2016F SolutionДокумент11 страницMSexam Stat 2016F SolutionRobinson Ortega MezaОценок пока нет
- Math 677. Fall 2009. Homework #4 SolutionsДокумент3 страницыMath 677. Fall 2009. Homework #4 SolutionsRodrigo KostaОценок пока нет
- Lecture Notes On The Ellipsoid AlgorithmДокумент8 страницLecture Notes On The Ellipsoid AlgorithmAlex CorqueОценок пока нет
- Hu2010 Article IterationCalculationsOfPeriodiДокумент6 страницHu2010 Article IterationCalculationsOfPeriodiIdris anderson Dzeugoua DjibouengОценок пока нет
- Statistics and Finance: An: David RuppertДокумент46 страницStatistics and Finance: An: David Ruppertmastanoob50% (2)
- Homework 3 SolutionsДокумент6 страницHomework 3 SolutionsislayerОценок пока нет
- Ma1132: Advanced Calculus, Hilary 2017Документ5 страницMa1132: Advanced Calculus, Hilary 2017Teutë DomiОценок пока нет
- SV41 Wave Guides - ModesДокумент16 страницSV41 Wave Guides - ModesAjayОценок пока нет
- On The Stability of A Mixed Cubic and QuДокумент10 страницOn The Stability of A Mixed Cubic and QuNikos MantzakourasОценок пока нет
- Normed Spaces Equivalent To Inner Product Spaces and Stability of Functional EquationsДокумент11 страницNormed Spaces Equivalent To Inner Product Spaces and Stability of Functional EquationsJamilu Adamu MusaОценок пока нет
- STAT 330 Extra Problems - Chapters 1 To 5Документ6 страницSTAT 330 Extra Problems - Chapters 1 To 5Matt WangОценок пока нет
- E1 251 Linear and Nonlinear Op2miza2on: Chapter 4: Convex and Quadra2c Func2onsДокумент35 страницE1 251 Linear and Nonlinear Op2miza2on: Chapter 4: Convex and Quadra2c Func2onsdata scienceОценок пока нет
- Solutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James ParkinsonДокумент9 страницSolutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James ParkinsonTOM DAVISОценок пока нет
- EE132B HW2 Solution 2019fallДокумент5 страницEE132B HW2 Solution 2019fallGao Andrew100% (1)
- Problem_Set_11_SolutionsДокумент4 страницыProblem_Set_11_Solutionspenar38488Оценок пока нет
- GR Exercise 1Документ4 страницыGR Exercise 1Keshav PrasadОценок пока нет
- Multivariable Calculus Practice Midterm 2 Solutions Prof. FedorchukДокумент5 страницMultivariable Calculus Practice Midterm 2 Solutions Prof. FedorchukraduОценок пока нет
- Estimators1 PDFДокумент2 страницыEstimators1 PDFHiinoОценок пока нет
- JMM Volume 7 Issue 2 Pages 231-250Документ20 страницJMM Volume 7 Issue 2 Pages 231-250milahnur sitiОценок пока нет
- Lecture Notes Week 1Документ10 страницLecture Notes Week 1tarik BenseddikОценок пока нет
- Chap7 Schrodinger Equation 1D Notes s12Документ14 страницChap7 Schrodinger Equation 1D Notes s12arwaОценок пока нет
- Spherical BesselДокумент2 страницыSpherical BesselpingОценок пока нет
- MIT18 S096F13 Lecnote3Документ7 страницMIT18 S096F13 Lecnote3Yacim GenОценок пока нет
- SoluciónДокумент3 страницыSoluciónMefisОценок пока нет
- Stats 100A Hw5Документ2 страницыStats 100A Hw5Billy BobОценок пока нет
- Assign20153 SolДокумент47 страницAssign20153 SolMarco Perez HernandezОценок пока нет
- , x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈Документ5 страниц, x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈guido360Оценок пока нет
- Isi JRF Stat 07Документ10 страницIsi JRF Stat 07api-26401608Оценок пока нет
- Assignment 1 - SolutionДокумент9 страницAssignment 1 - SolutionscribdllОценок пока нет
- Sergey K. SekatskiiДокумент9 страницSergey K. SekatskiipuyoshitОценок пока нет
- Exercises and Answers to Chapter 1 Density FunctionsДокумент35 страницExercises and Answers to Chapter 1 Density Functionsnorman camarenaОценок пока нет
- Final Exam Solutions and Probability ConceptsДокумент5 страницFinal Exam Solutions and Probability ConceptsShubhsОценок пока нет
- Solutions # 5: Department of Physics IIT Kanpur, Semester II, 2022-23Документ5 страницSolutions # 5: Department of Physics IIT Kanpur, Semester II, 2022-23darshan sethiaОценок пока нет
- Handout 14: Unbiasedness and MSEДокумент3 страницыHandout 14: Unbiasedness and MSEVictor ChenОценок пока нет
- Nadaraya-Watson Kernel Regression Estimator DerivationДокумент4 страницыNadaraya-Watson Kernel Regression Estimator DerivationManuОценок пока нет
- Probability NotesДокумент44 страницыProbability NotesLavakumar Karne100% (3)
- Error FunДокумент10 страницError FunIkram Ben SalemОценок пока нет
- Monte Carlo Simulation TechniquesДокумент3 страницыMonte Carlo Simulation TechniquessdaetwylerОценок пока нет
- 4404 Notes ATVДокумент6 страниц4404 Notes ATVSudeep RajaОценок пока нет
- Math homework 4 convolution and non-central chi-squareДокумент1 страницаMath homework 4 convolution and non-central chi-squarePY WongОценок пока нет
- Solutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James ParkinsonДокумент10 страницSolutions To Tutorial 2 (Week 3) : Lecturers: Daniel Daners and James Parkinsonrickrat_2kОценок пока нет
- 15math eДокумент7 страниц15math eJuan PerezОценок пока нет
- JksdhflkmsДокумент2 страницыJksdhflkmsGMОценок пока нет
- A Note On The Fixed Points of Positive Linear Operators: SciencedirectДокумент10 страницA Note On The Fixed Points of Positive Linear Operators: SciencedirectRisqi KhansaОценок пока нет
- PBM NotesДокумент130 страницPBM NotesSurya IyerОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- Brillinger 1975 BДокумент45 страницBrillinger 1975 BMP113Оценок пока нет
- Another Take On Cumulants by BrillingerДокумент18 страницAnother Take On Cumulants by BrillingerMP113Оценок пока нет
- Brillinger 1975 BДокумент45 страницBrillinger 1975 BMP113Оценок пока нет
- Bhattacharya NonparametricДокумент30 страницBhattacharya NonparametricMP113Оценок пока нет
- Spectral Measures and The Spectral Theorem: 1 Preliminary Facts About Hilbert SpacesДокумент10 страницSpectral Measures and The Spectral Theorem: 1 Preliminary Facts About Hilbert SpacesEpic WinОценок пока нет
- LinearДокумент1 страницаLinearMP113Оценок пока нет
- Hilbert Schmidt FramesДокумент20 страницHilbert Schmidt FramesMP113Оценок пока нет
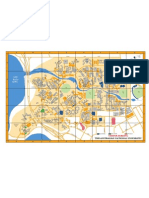
- 542 Visitor Parking Map Feb2011Документ1 страница542 Visitor Parking Map Feb2011MP113Оценок пока нет
- 542 Visitor Parking Map Feb2011Документ1 страница542 Visitor Parking Map Feb2011MP113Оценок пока нет
- Miscellaneous On-Line Topics For: Calculus Applied To The Real WorldДокумент25 страницMiscellaneous On-Line Topics For: Calculus Applied To The Real Worldchevave322Оценок пока нет
- Hull WhiteДокумент2 страницыHull WhiteJavierma BedoyaОценок пока нет
- Representation of A Set - ALGEBRAДокумент2 страницыRepresentation of A Set - ALGEBRAphenorenОценок пока нет
- First AssignmentДокумент4 страницыFirst AssignmentwtfОценок пока нет
- Math Diagnostic ExamДокумент4 страницыMath Diagnostic ExamMananquil JeromeОценок пока нет
- Matrices and Complex Numbers NotesДокумент81 страницаMatrices and Complex Numbers NotesShanmugasundaramОценок пока нет
- BSE Synopsis Edited 22.03.2021Документ48 страницBSE Synopsis Edited 22.03.2021abdrhmn200377Оценок пока нет
- Vineet Loomba Unacademy Practice Wavy Curve and LogarithmsДокумент1 страницаVineet Loomba Unacademy Practice Wavy Curve and LogarithmsAditya KumarОценок пока нет
- TAFMES Pre-Assessment in Mathematics VIДокумент4 страницыTAFMES Pre-Assessment in Mathematics VIRhona SagalaОценок пока нет
- SQL functions for calculated columns in SAP HANAДокумент8 страницSQL functions for calculated columns in SAP HANAsrinivas100% (1)
- RNMagic SquareДокумент17 страницRNMagic SquareParivalavan ManoharanОценок пока нет
- 1011202222101PM-Class 5 Revision Worksheet For First Term Examination - MathsДокумент7 страниц1011202222101PM-Class 5 Revision Worksheet For First Term Examination - Mathsak dОценок пока нет
- CurvesДокумент81 страницаCurvesdonprofaghatiseОценок пока нет
- Visualising The Distribution of PrimesДокумент35 страницVisualising The Distribution of PrimesrosicomusОценок пока нет
- Jmap PH VectorsДокумент14 страницJmap PH VectorsrocksonballaОценок пока нет
- Chapter 4 Power SeriesДокумент55 страницChapter 4 Power SeriesThalagawali RajagopalОценок пока нет
- Basic Calculus Q3 M13Документ12 страницBasic Calculus Q3 M13garryОценок пока нет
- The Greek Alphabet: CAP / Lower Name & DescriptionДокумент3 страницыThe Greek Alphabet: CAP / Lower Name & DescriptionvivnarayanОценок пока нет
- Part 2 - The Second-Order Linear ODEsДокумент59 страницPart 2 - The Second-Order Linear ODEsnam nguyenОценок пока нет
- Psa - 2 Units 201-20-Important Questions 1Документ3 страницыPsa - 2 Units 201-20-Important Questions 1Kunte Vikas Rao0% (1)
- JNTU Digital System Design Supplementary Exam September 2010Документ2 страницыJNTU Digital System Design Supplementary Exam September 2010Ravula VenkateshОценок пока нет
- Problem Solving Skills of Shs Students in General MathematicsДокумент85 страницProblem Solving Skills of Shs Students in General Mathematicslyraclaire09Оценок пока нет
- Optimization Techniques: J. FisherДокумент11 страницOptimization Techniques: J. FisherDaniel NimabwayaОценок пока нет
- Computers in Schools Model of UseДокумент41 страницаComputers in Schools Model of UseKhurram ShahzadОценок пока нет
- Cartoon Guide To Löb's TheoremДокумент7 страницCartoon Guide To Löb's TheoremEliezerYudkowsky100% (2)
- Sed 322 SyllabusДокумент5 страницSed 322 Syllabusapi-251146794Оценок пока нет
- Backpropagation in Convolutional Neural Networks - DeepGridДокумент12 страницBackpropagation in Convolutional Neural Networks - DeepGridIbrahim GadОценок пока нет
- BooksДокумент2 страницыBooksDavid PattyОценок пока нет
- Computer Application For Chemical EngineeringДокумент20 страницComputer Application For Chemical EngineeringBia TordecillasОценок пока нет
- Factors That Influence Attitudes of Computer Science Students Towards Mathematics and Related Courses at The Tertiary Level of EducationДокумент8 страницFactors That Influence Attitudes of Computer Science Students Towards Mathematics and Related Courses at The Tertiary Level of EducationInternational Journal of Innovative Science and Research TechnologyОценок пока нет