Вам также может понравиться
- Guía para el análisis y solución de problemas de resistencia de materialesОт EverandGuía para el análisis y solución de problemas de resistencia de materialesОценок пока нет
- Movimiento Armónico SimpleДокумент21 страницаMovimiento Armónico SimpleJaime Campos BerrúОценок пока нет
- 1informe de Lab 1 FISICA 2Документ29 страниц1informe de Lab 1 FISICA 2ricardo ccayo quiispeОценок пока нет
- Lab1Документ10 страницLab1Daniel FVОценок пока нет
- Reporte Practica 9Документ18 страницReporte Practica 9Ana Laura Figueroa AlcántaraОценок пока нет
- Práctica - MasaResorteДокумент4 страницыPráctica - MasaResorteChristian TorresОценок пока нет
- PRÁCTICA DE LABORATORIO N°02 - Movimiento Armonico SimpleДокумент11 страницPRÁCTICA DE LABORATORIO N°02 - Movimiento Armonico SimpleAnderson Reyes0% (1)
- Conservacion de La Cantidad de MovimientoДокумент7 страницConservacion de La Cantidad de MovimientoAntonioLujan0% (1)
- GUÍA N°02 - Movimiento Armonico SimpleДокумент11 страницGUÍA N°02 - Movimiento Armonico SimpleYanira Gutierrez BalderaОценок пока нет
- Reporte 6 Fisica Basica UsacДокумент15 страницReporte 6 Fisica Basica UsacMarcos A. Sanchez Berganza0% (1)
- Grados de Libertad y Movimiento Armonico SimpleДокумент13 страницGrados de Libertad y Movimiento Armonico SimpleJOse RodrIguezОценок пока нет
- Lab Fisica Practica 6Документ7 страницLab Fisica Practica 6iiascribdОценок пока нет
- Conservación de la energía mecánica en choquesДокумент14 страницConservación de la energía mecánica en choquesLeirbagIII100% (1)
- INFORME SESION 2 Fisica GeneralДокумент23 страницыINFORME SESION 2 Fisica GeneralEsneider VargasОценок пока нет
- Informe de Mecánica Vectorial N°03Документ23 страницыInforme de Mecánica Vectorial N°03NicolasОценок пока нет
- Sistema masa-resorte: Oscilaciones armónicasДокумент8 страницSistema masa-resorte: Oscilaciones armónicasSebastián MuñozОценок пока нет
- Ley de Hooke y segunda ley de NewtonДокумент14 страницLey de Hooke y segunda ley de NewtonJefferson OrozcoОценок пока нет
- INFORME ENERGIA DE UN OSCILADOR SIMPLEДокумент5 страницINFORME ENERGIA DE UN OSCILADOR SIMPLEdagamaОценок пока нет
- Tarea 2 Fisica DinamicaДокумент17 страницTarea 2 Fisica DinamicaCarlos MRОценок пока нет
- EdgarДокумент6 страницEdgarEdgar Pérez GuevaraОценок пока нет
- Oscilador Armonico Simple Sistema Masa ResorteДокумент7 страницOscilador Armonico Simple Sistema Masa ResorteNassly GodoyОценок пока нет
- Unidad 2 Mec TДокумент32 страницыUnidad 2 Mec TAmador LopezОценок пока нет
- Proyecto de Fisica CatapultaДокумент22 страницыProyecto de Fisica CatapultaNhayer NinaviaОценок пока нет
- Movimiento Oscilatorio: Resumen ObjetivosДокумент6 страницMovimiento Oscilatorio: Resumen Objetivoscamilo gonzalezОценок пока нет
- Informe 7Документ16 страницInforme 7Jose GarciaОценок пока нет
- Informe 5 Carlos Reyes Lab Fisica !!!!!Документ17 страницInforme 5 Carlos Reyes Lab Fisica !!!!!Fernando VillalbaОценок пока нет
- Formato de Presentación - UNAD 601Документ28 страницFormato de Presentación - UNAD 601John Michel Guaneme RodriguezОценок пока нет
- Correccion FisicaДокумент10 страницCorreccion FisicaEstefania GarciaОценок пока нет
- Laboratorio Practica 9Документ2 страницыLaboratorio Practica 9Patricia SanabriaОценок пока нет
- Guía Lab. Física-IIДокумент69 страницGuía Lab. Física-IImemessОценок пока нет
- Física Elemental IIДокумент191 страницаFísica Elemental IIDaniela GonzalezОценок пока нет
- Practicas 123Документ15 страницPracticas 123Josue LS100% (1)
- Informe 4 FisicaДокумент19 страницInforme 4 FisicaEdu TorresОценок пока нет
- Laboratorio 2 de Física IДокумент32 страницыLaboratorio 2 de Física IMariza Martina Camones MaguiñaОценок пока нет
- Laboratorio 1 Fisica IiДокумент16 страницLaboratorio 1 Fisica IiMarioly Susana Jimenez VargasОценок пока нет
- Practica 9Документ14 страницPractica 9Ana Laura Figueroa AlcántaraОценок пока нет
- Laboratorio 01 Estatica 1Документ25 страницLaboratorio 01 Estatica 1Moises Javier Balladares ArroyoОценок пока нет
- Movimiento Armonico SimpleДокумент5 страницMovimiento Armonico SimpleMelissa PerezОценок пока нет
- Informe 4 Fisica IIДокумент4 страницыInforme 4 Fisica IIMatías SilvaОценок пока нет
- Copia de Documento Sin TítuloДокумент14 страницCopia de Documento Sin TítuloRenzo Llontop CoronelОценок пока нет
- Informe Movimiento Armonico Simple M.A.S. y ResortesДокумент5 страницInforme Movimiento Armonico Simple M.A.S. y ResortesDuvan FonsecaОценок пока нет
- Modulo 1Документ26 страницModulo 1Jose Alejandro Garcia JimenezОценок пока нет
- Informe Laboratorio de Fisica General No 2Документ16 страницInforme Laboratorio de Fisica General No 2Anfred Angelis Cuenca leivaОценок пока нет
- Concepto de EnergiaДокумент9 страницConcepto de EnergiaRuby TeranОценок пока нет
- Monografía Física IДокумент17 страницMonografía Física ICristhianОценок пока нет
- Informe 3 Laboratorio Física 1Документ12 страницInforme 3 Laboratorio Física 1farith.huaman.pОценок пока нет
- Lab-Fisica.. EstaticaДокумент17 страницLab-Fisica.. EstaticaMaik P NuñezОценок пока нет
- Proyecto Final de Laboratorio BILLARДокумент10 страницProyecto Final de Laboratorio BILLARLuis Andres Ariza Osorio100% (1)
- Lab 05 FisicaДокумент18 страницLab 05 Fisicaandre.baca.tОценок пока нет
- Mat EeeeeeeeeeeДокумент19 страницMat EeeeeeeeeeeDANKO ABDEL INFANTE OXAОценок пока нет
- Práctica de Laboratorio N°2-Fuerzas EstáticaДокумент25 страницPráctica de Laboratorio N°2-Fuerzas EstáticaLariza Reyes RincónОценок пока нет
- Segunda Ley NewtonДокумент14 страницSegunda Ley NewtonFrank Jr Sangay CorralesОценок пока нет
- Informe Ondas y Calor-Movimiento OscilatorioДокумент21 страницаInforme Ondas y Calor-Movimiento OscilatorioSamuel Altamirano LoaОценок пока нет
- GUÍA N°08 - Principio de Conservación de EnergiaДокумент22 страницыGUÍA N°08 - Principio de Conservación de EnergiaAusbel Silva LinaresОценок пока нет
- Análisis de Fuerzas Dinámicas y Mecánica ClásicaДокумент26 страницAnálisis de Fuerzas Dinámicas y Mecánica ClásicaJULIO CESAR QUEZADA YACILAОценок пока нет
- Practica 12 Fisica 1 Cantidad de Movimiento LinealДокумент14 страницPractica 12 Fisica 1 Cantidad de Movimiento LinealJose AlonsoОценок пока нет
- MF0624_1 - Técnicas básicas de electricidad de vehículosОт EverandMF0624_1 - Técnicas básicas de electricidad de vehículosРейтинг: 5 из 5 звезд5/5 (2)
- Informe de Mecánica Vectorial N°02Документ18 страницInforme de Mecánica Vectorial N°02NicolasОценок пока нет
- Folleto EstherДокумент1 страницаFolleto EstherNicolasОценок пока нет
- 1° Laboratorio Ing ResoluciónДокумент3 страницы1° Laboratorio Ing ResoluciónNicolasОценок пока нет
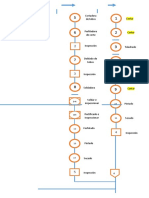
- Dop BicicletaДокумент2 страницыDop BicicletaNicolas100% (4)
- Informe de Mecánica Vectorial N°03Документ23 страницыInforme de Mecánica Vectorial N°03NicolasОценок пока нет
- Cálculo integral múltiple ingenieríaДокумент7 страницCálculo integral múltiple ingenieríaNicolasОценок пока нет
- For T2Документ3 страницыFor T2NicolasОценок пока нет
- Cuestionario AfectividadДокумент15 страницCuestionario AfectividadNicolasОценок пока нет
- Informe de Taller N2Документ8 страницInforme de Taller N2NicolasОценок пока нет
- Informe de CaleiodoscopioДокумент8 страницInforme de CaleiodoscopioNicolasОценок пока нет
- Cuestionario Quimica Lab4Документ2 страницыCuestionario Quimica Lab4NicolasОценок пока нет
- Niveles de ruido que el oído humano puede tolerarДокумент4 страницыNiveles de ruido que el oído humano puede tolerarCristina FabianОценок пока нет
- BIORREMEDIACIÓNДокумент4 страницыBIORREMEDIACIÓNNicolasОценок пока нет
- Informe de Laboratorio. N°01Документ17 страницInforme de Laboratorio. N°01NicolasОценок пока нет
- Informe de IntroducciónДокумент11 страницInforme de IntroducciónNicolasОценок пока нет
- Creatividad e Innovación EmpresarialДокумент10 страницCreatividad e Innovación EmpresarialNicolasОценок пока нет
- Empresas MedioambienteДокумент1 страницаEmpresas MedioambienteNicolasОценок пока нет
- Johnny DeepДокумент1 страницаJohnny DeepNicolasОценок пока нет
- Un Capítulo Pendiente: El Método en El Debate Didáctico Contemporáneo - Gloria EdelsteinДокумент2 страницыUn Capítulo Pendiente: El Método en El Debate Didáctico Contemporáneo - Gloria Edelsteinidontknoman75% (4)
- Trabajo FinalДокумент8 страницTrabajo FinalJhimy PeraltaОценок пока нет
- Evidencia 5 Fase III Integracion de Areas Involucradas en El Servicio Al ClienteДокумент9 страницEvidencia 5 Fase III Integracion de Areas Involucradas en El Servicio Al ClienteLuiggii PaterninaОценок пока нет
- Crear botones en GIMPДокумент10 страницCrear botones en GIMPlobodelaire1966Оценок пока нет
- Teoria Egologica Del Derecho FinalДокумент29 страницTeoria Egologica Del Derecho FinalCarlos Fernando RosalesОценок пока нет
- Presentacion Placas HuellasДокумент15 страницPresentacion Placas Huellasdaka59012Оценок пока нет
- Modulo de Fisica Grado 10Документ35 страницModulo de Fisica Grado 10YRDZ TUTOSОценок пока нет
- Método de Jerarquización para La Evaluación de CargosДокумент37 страницMétodo de Jerarquización para La Evaluación de CargosLaly BravoОценок пока нет
- RTR 160 4v-4t Nafta - User-ManualДокумент122 страницыRTR 160 4v-4t Nafta - User-ManualVentas Moto Boedo100% (1)
- Docencia: Página 1 DE 88 Informe Final de Trabajo de Grado en Modalidad de Práctica VERSIÓN: 1.0Документ88 страницDocencia: Página 1 DE 88 Informe Final de Trabajo de Grado en Modalidad de Práctica VERSIÓN: 1.0Yeferson Ortega HernandezОценок пока нет
- ETSA. LevantamientoДокумент4 страницыETSA. Levantamientoon-offОценок пока нет
- Origen y Evolución de La Profesión de AbogadoДокумент16 страницOrigen y Evolución de La Profesión de AbogadoAlejandro Jose Colmenares Call50% (6)
- Ciencia y AmbienteДокумент3 страницыCiencia y AmbienteEdilberto Linares100% (1)
- Entrevista - Daniela MartinezДокумент12 страницEntrevista - Daniela MartinezDaniela MartinezОценок пока нет
- ECF 22 y Guías Técnicas W PDFДокумент78 страницECF 22 y Guías Técnicas W PDFcapry_cornio@yahoo.com100% (4)
- Triptico Terapia Organico RosaДокумент2 страницыTriptico Terapia Organico Rosamary tueroОценок пока нет
- Capellanes Agentes de CambioДокумент183 страницыCapellanes Agentes de CambioiglesianazreyОценок пока нет
- Modelos de Correlación Entre El PDC y El CBR Inalterado PaДокумент23 страницыModelos de Correlación Entre El PDC y El CBR Inalterado PaSara Ramirez Valencia100% (2)
- Temario de Redacción 2018-1Документ6 страницTemario de Redacción 2018-1Candy Zurita100% (1)
- Zapatas ProfundasДокумент8 страницZapatas Profundasmanaudi100% (1)
- UNIDAD 2 TAREA 2 TrigonometriaДокумент10 страницUNIDAD 2 TAREA 2 TrigonometriaANDREA ALVAREZ DIAZОценок пока нет
- Los efectos psicológicos de la ausencia paternaДокумент2 страницыLos efectos psicológicos de la ausencia paternasariangel39100% (1)
- Mural ComunicativoДокумент12 страницMural Comunicativomaria elieeneht mejiaОценок пока нет
- Recolección de DatosДокумент7 страницRecolección de Datosluis roberto chacon ariasОценок пока нет
- MONOGRAFIAДокумент18 страницMONOGRAFIALIGIA MILAGROS RODRIGUEZ OCHOAОценок пока нет
- TP N°115Документ2 страницыTP N°115Facundo FrancoОценок пока нет
- Ciencias TecnologisticasДокумент8 страницCiencias TecnologisticasRodriguez Quintanilla CristianОценок пока нет
- Rituales Oscuros - Elkin CordobaДокумент480 страницRituales Oscuros - Elkin CordobaHarold MartinezОценок пока нет
- Calefaccion CobreriaДокумент45 страницCalefaccion CobreriabernacasbasОценок пока нет
- Electiva Actividad 7Документ26 страницElectiva Actividad 7nora pinzonОценок пока нет