Вам также может понравиться
- Tracking Solar Panel: Data AnalysisДокумент3 страницыTracking Solar Panel: Data AnalysisPravat Satpathy100% (1)
- Design and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerДокумент8 страницDesign and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerarcherselevatorsОценок пока нет
- Solar TrackerДокумент3 страницыSolar TrackerTarun Kumar ReddyОценок пока нет
- Solar TrackingДокумент4 страницыSolar TrackingJournalNX - a Multidisciplinary Peer Reviewed JournalОценок пока нет
- 16.automatic Dual-Axis Solar Tracking System PDFДокумент5 страниц16.automatic Dual-Axis Solar Tracking System PDFnadeemq_0786Оценок пока нет
- Suman SolankiДокумент22 страницыSuman SolankiNadim JilaniОценок пока нет
- Solar TrackerДокумент16 страницSolar TrackergalaxyОценок пока нет
- Power Generation Using Windmill From Vehicle Movement in Highways and Use of Smart Solar Tracking System With Intelligent Lighting Control Project Reference No.: 40S - Be - 0640Документ3 страницыPower Generation Using Windmill From Vehicle Movement in Highways and Use of Smart Solar Tracking System With Intelligent Lighting Control Project Reference No.: 40S - Be - 0640sumaniceОценок пока нет
- Microcontroller Based System (Solar Tracking System)Документ1 страницаMicrocontroller Based System (Solar Tracking System)Neil Jelo MarasiganОценок пока нет
- Project Name: Solar Tracking System Guide Name: Prof. R.S AmbekarДокумент24 страницыProject Name: Solar Tracking System Guide Name: Prof. R.S Ambekarnaman rakeshОценок пока нет
- Solartrackingsystem 160325184948Документ26 страницSolartrackingsystem 160325184948lubna dheisatОценок пока нет
- Paper4150 SolarTrackingSystem v8Документ6 страницPaper4150 SolarTrackingSystem v8Tharshninipriya RajasekarОценок пока нет
- Sensors Assignment Automatic Solar Tracking SystemДокумент2 страницыSensors Assignment Automatic Solar Tracking Systemcheenu15Оценок пока нет
- Automatic Solar Tracking System PDFДокумент12 страницAutomatic Solar Tracking System PDFPraveen Mathias0% (1)
- Helianthus: The Solar Tracking SystemДокумент17 страницHelianthus: The Solar Tracking SystemSampath KumarОценок пока нет
- Arduino Based Solar Tracking SystemДокумент30 страницArduino Based Solar Tracking SystemPandey NeetaОценок пока нет
- Arduino Based Sun Tracking Solar Panel: Gogulamudi Srikanth Reddy (18Vf1M3323) Gandu Naga Sai Tejaswi (18Vf1M3319)Документ39 страницArduino Based Sun Tracking Solar Panel: Gogulamudi Srikanth Reddy (18Vf1M3323) Gandu Naga Sai Tejaswi (18Vf1M3319)Sujit reddyОценок пока нет
- Symbol EsДокумент17 страницSymbol EsMohamed BelmahdiОценок пока нет
- Dual Axis Solar Tracking System Using LDR With InverterДокумент13 страницDual Axis Solar Tracking System Using LDR With InverterAjay RajОценок пока нет
- Solar Energy Tracking SytemДокумент3 страницыSolar Energy Tracking Sytem18E3457 MukundiniОценок пока нет
- Low Cost Two-Axis Automatic Solar Tracking System: Amevi Acakpovi Nana Yaw Asabere Daniel Babbo SunnyДокумент8 страницLow Cost Two-Axis Automatic Solar Tracking System: Amevi Acakpovi Nana Yaw Asabere Daniel Babbo Sunnyabel tibebuОценок пока нет
- Solar Tracking SystemsДокумент25 страницSolar Tracking SystemsUncle TravelsОценок пока нет
- 1097-Article Text-4215-1-10-20230424Документ8 страниц1097-Article Text-4215-1-10-20230424ghalemkamelghanemОценок пока нет
- Design and Implementation of RoboticДокумент8 страницDesign and Implementation of RoboticAruna BharathiОценок пока нет
- Dual-Axis Solar Tracking Over Fixed Solar Systems: November 2016Документ7 страницDual-Axis Solar Tracking Over Fixed Solar Systems: November 2016Akhilesh MauryaОценок пока нет
- Intelligent Solar Tracker System Implemented On 8051 MicrocontrollerДокумент5 страницIntelligent Solar Tracker System Implemented On 8051 MicrocontrollerseventhsensegroupОценок пока нет
- IJCRT2306272Документ4 страницыIJCRT2306272C.Akhila RamОценок пока нет
- DASTДокумент19 страницDASTKruthi M LОценок пока нет
- Solar TrackerДокумент4 страницыSolar TrackerJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- Design and Implementation of Tracking System For Dual Axis Solar Tracker Using PIC 16F887Документ4 страницыDesign and Implementation of Tracking System For Dual Axis Solar Tracker Using PIC 16F887ZclanPJ4UОценок пока нет
- Dual Axis Solar Tracking SystemДокумент22 страницыDual Axis Solar Tracking SystemReshma DurgasriОценок пока нет
- Solar TrackingДокумент14 страницSolar TrackingPraveen RiderОценок пока нет
- Off. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsДокумент7 страницOff. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsSawan AnandОценок пока нет
- Solar Sunlight TrackerДокумент38 страницSolar Sunlight Trackersukumarloganathan2003Оценок пока нет
- Micro Controller Based Solar Tracking SystemДокумент3 страницыMicro Controller Based Solar Tracking SystemkharabevinayОценок пока нет
- A Design of Single Axis Sun Tracking SystemДокумент4 страницыA Design of Single Axis Sun Tracking SystemMazhar UddeenОценок пока нет
- Arduino Mega 2560 Data SheetДокумент23 страницыArduino Mega 2560 Data SheetGodfred NkansahОценок пока нет
- Solar TrackerДокумент36 страницSolar Trackerujasparmar2802Оценок пока нет
- Solar Tracking SystemДокумент26 страницSolar Tracking SystemKarthikeya XeroxОценок пока нет
- Ieee 1Документ3 страницыIeee 1murariОценок пока нет
- Project Title: Solar Tracking System Using LDR Abstract:: Jyothis Hmathi Institut EOF Techno Logy AND ScienceДокумент3 страницыProject Title: Solar Tracking System Using LDR Abstract:: Jyothis Hmathi Institut EOF Techno Logy AND ScienceKalyan Reddy AnuguОценок пока нет
- Automatic Street Light Control System Using Microcontroller: October 2013Документ6 страницAutomatic Street Light Control System Using Microcontroller: October 2013Parasuram SeelamОценок пока нет
- Solar Tracking Device: Testing and ResultsДокумент1 страницаSolar Tracking Device: Testing and ResultsShaunAnthonyОценок пока нет
- DOC-202317Документ23 страницыDOC-202317nittinmohanty.nmОценок пока нет
- Paper 1Документ6 страницPaper 1fathy syamОценок пока нет
- Dual Axis Solar Tracking System Using Microcontroller With MPPTДокумент4 страницыDual Axis Solar Tracking System Using Microcontroller With MPPTAakansha GuptaОценок пока нет
- Nguyen NamДокумент54 страницыNguyen NamBelayneh TadesseОценок пока нет
- My ProjectДокумент6 страницMy Projectyaswanth 9573099277Оценок пока нет
- A Design of Single Axis Sun Tracking System: July 2011Документ5 страницA Design of Single Axis Sun Tracking System: July 2011shilpaОценок пока нет
- JETIR1811340Документ4 страницыJETIR1811340S NitheshОценок пока нет
- Solar PresentationДокумент11 страницSolar PresentationDicksonОценок пока нет
- Automated Solar Tracking SystemДокумент24 страницыAutomated Solar Tracking SystemSyed Zulqarnain Ali ShahОценок пока нет
- Visvesvaraya Technological University: Solar Panel With Sun Tracking Using IotДокумент26 страницVisvesvaraya Technological University: Solar Panel With Sun Tracking Using Iotajjappa tОценок пока нет
- (REPORT) - Automatic Sun Tracking SystemДокумент14 страниц(REPORT) - Automatic Sun Tracking SystemPrashant Kumar100% (1)
- Solar Tracking System With GSM Monitoring: Report On Stepper Motor DriverДокумент30 страницSolar Tracking System With GSM Monitoring: Report On Stepper Motor DriverRam PrasathОценок пока нет
- Single Axis Solar Tracking System Using 555 ICДокумент19 страницSingle Axis Solar Tracking System Using 555 ICSuresh KumarОценок пока нет
- Paper IJTEE2020Документ8 страницPaper IJTEE2020Djamila RekiouaОценок пока нет
- Scope of Work in The ProjectДокумент16 страницScope of Work in The Projectmeen19111087 KFUEITОценок пока нет
- Computer Organization and Assembly Language: Laboratory ManualДокумент25 страницComputer Organization and Assembly Language: Laboratory ManualMohd ShahОценок пока нет
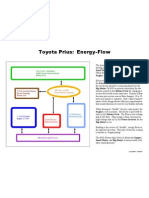
- Prius Energy FlowДокумент1 страницаPrius Energy Flowmsfz751Оценок пока нет
- Haulmax HaulTruck 11.21.13 FINALДокумент2 страницыHaulmax HaulTruck 11.21.13 FINALjogremaurОценок пока нет
- Infoblox Datasheet Bloxone DdiДокумент3 страницыInfoblox Datasheet Bloxone DdiSudhakar AruchamyОценок пока нет
- Xbox 360 Repair Manual Guide+ (02-20)Документ19 страницXbox 360 Repair Manual Guide+ (02-20)Rosselino DE Jesus MonteiroОценок пока нет
- DejobbingДокумент11 страницDejobbingTanayaОценок пока нет
- Ethics in Software Engineering PDFДокумент2 страницыEthics in Software Engineering PDFJessicaОценок пока нет
- Advt No.: HSCC/RECT/2019/2: 1 (A) EXECUTIVE ASSISTANT ENGINEER (Civil/Electrical/Mechanical)Документ9 страницAdvt No.: HSCC/RECT/2019/2: 1 (A) EXECUTIVE ASSISTANT ENGINEER (Civil/Electrical/Mechanical)jitu brarОценок пока нет
- DHCP Presentation 01Документ20 страницDHCP Presentation 01rhariharan_13Оценок пока нет
- Remake The Mosquito KillerДокумент18 страницRemake The Mosquito KillerLuelsonCordovaDeclaradorОценок пока нет
- Algorithmia 2021 - Enterprise - ML - TrendsДокумент41 страницаAlgorithmia 2021 - Enterprise - ML - TrendsRodolfoОценок пока нет
- Review On Supply Chain Management of Coats Bangladesh PDFДокумент14 страницReview On Supply Chain Management of Coats Bangladesh PDFSajeed Mahmud MaheeОценок пока нет
- Mitsubishi f700 Manual PDFДокумент416 страницMitsubishi f700 Manual PDFNelsonOsmarSanchezОценок пока нет
- Product CodeДокумент20 страницProduct CodeHEnajeОценок пока нет
- Power Electronics: DR - Arkan A.Hussein Power Electronics Fourth ClassДокумент13 страницPower Electronics: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliОценок пока нет
- REPORTINGДокумент55 страницREPORTINGSabharish KoruturuОценок пока нет
- PentesterLab SolutionsДокумент48 страницPentesterLab SolutionsDIPAMA MichelОценок пока нет
- OSI ModelДокумент18 страницOSI ModelruletriplexОценок пока нет
- Mining Cables AnacondaДокумент54 страницыMining Cables AnacondaNadila Adza SaviraОценок пока нет
- Assignment No.7 PDFДокумент6 страницAssignment No.7 PDFAbdul HameedОценок пока нет
- Marshalling Box Is A Type of Box Which Is Connected at One Side of Transformer. ItДокумент1 страницаMarshalling Box Is A Type of Box Which Is Connected at One Side of Transformer. ItvigneshwarannnОценок пока нет
- Controlling Rail Potential of DC Supplied Rail Traction Systems PDFДокумент10 страницControlling Rail Potential of DC Supplied Rail Traction Systems PDFysperdanaОценок пока нет
- Doosan Diesel Engine DL06Документ211 страницDoosan Diesel Engine DL06mnowaq98% (42)
- Characteristics of Digital DataДокумент6 страницCharacteristics of Digital DataArdi DiraОценок пока нет
- Masterpieces of Piano MusicДокумент562 страницыMasterpieces of Piano Musichtrung2101100% (1)
- SRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaДокумент4 страницыSRT/2020-21/11/29 To. M/S Deputy Director Research Lab: Punjab PWD (B&R) PatialaAyush GoyalОценок пока нет
- Khairah@Asma'a, Saedah, Muhammad Faizal - 2017 - Penerimaan M-Pembelajaran Dalam Kalangan Pensyarah Institut Pendidikan Guru Malaysia MeДокумент18 страницKhairah@Asma'a, Saedah, Muhammad Faizal - 2017 - Penerimaan M-Pembelajaran Dalam Kalangan Pensyarah Institut Pendidikan Guru Malaysia MeMstr SevenОценок пока нет
- BSC CBCS Computer-ScienceДокумент21 страницаBSC CBCS Computer-Scienceaniruddha shimpaleОценок пока нет
- HIAB14000XGДокумент267 страницHIAB14000XGMigueОценок пока нет
- PVV Solar Cell US0123 PDFДокумент2 страницыPVV Solar Cell US0123 PDFNguyễn Anh DanhОценок пока нет