Вам также может понравиться
- PDE TextbookДокумент310 страницPDE Textbookrashid khanОценок пока нет
- RSH Qam11 ch01Документ35 страницRSH Qam11 ch01Ball SuttaОценок пока нет
- Fixed Fixed Fixed Fixed PlateДокумент8 страницFixed Fixed Fixed Fixed Platejose alberto padillaОценок пока нет
- Oral Defense RubricsДокумент3 страницыOral Defense RubricsHanah Crista CaparasОценок пока нет
- 3 (Routledge Masters in Public Management) Sandra Van Thiel - Research Methods in Public Administration and Public Management - An Introduction-Routledge (2014)Документ208 страниц3 (Routledge Masters in Public Management) Sandra Van Thiel - Research Methods in Public Administration and Public Management - An Introduction-Routledge (2014)hazeypotterОценок пока нет
- Unit-3 Application of Differential EquationДокумент20 страницUnit-3 Application of Differential EquationRock TalОценок пока нет
- Specimen Question Paper Sec 3 Day 2Документ2 страницыSpecimen Question Paper Sec 3 Day 2Saifur Rahman100% (1)
- Modal Analysis of A Aeroplane WingДокумент20 страницModal Analysis of A Aeroplane WingPrasanth Inavolu IPОценок пока нет
- Unit Ii BVPДокумент24 страницыUnit Ii BVPCurious ManОценок пока нет
- Tutorial Exercise 3Документ3 страницыTutorial Exercise 3BelaynewОценок пока нет
- Lesson 8 VC.06 Day2Документ16 страницLesson 8 VC.06 Day2Sri RaghavanОценок пока нет
- 04 Method of Separation of VariablesДокумент15 страниц04 Method of Separation of VariablesRajkumar MuthumanickamОценок пока нет
- Applied Sciences: Transverse Vibration of Clamped-Pinned-Free Beam With Mass at Free EndДокумент16 страницApplied Sciences: Transverse Vibration of Clamped-Pinned-Free Beam With Mass at Free Endanandhu s kumarОценок пока нет
- Transverse Vibration of A Cantilever BeamДокумент9 страницTransverse Vibration of A Cantilever BeamGeraldo Rossoni SisquiniОценок пока нет
- Paper: Iit-Jam 2008Документ5 страницPaper: Iit-Jam 2008Mr MОценок пока нет
- UPSC CSE Main 2023 Mathematics Optional Paper 1Документ5 страницUPSC CSE Main 2023 Mathematics Optional Paper 1sukutraoОценок пока нет
- Source Diginotes - In: Cambridge Institute of TechnologyДокумент2 страницыSource Diginotes - In: Cambridge Institute of Technologyhoney1002Оценок пока нет
- Maths (CH 2) 2Документ5 страницMaths (CH 2) 2Soumen Biswas48Оценок пока нет
- CC Calculus Chapter 6 AnswersДокумент23 страницыCC Calculus Chapter 6 AnswersAganon AristotleОценок пока нет
- (Kenmotsu - 97) On Veronese Boruvka SpheresДокумент5 страниц(Kenmotsu - 97) On Veronese Boruvka SpheresMukut Mani TripathiОценок пока нет
- Ma9214-Applied Mathematics For Engineering Design-R9 2010 JanДокумент5 страницMa9214-Applied Mathematics For Engineering Design-R9 2010 JanHarish Kutty HariОценок пока нет
- PureMaths1976 Pastpaper P2Документ4 страницыPureMaths1976 Pastpaper P2wltfОценок пока нет
- Answer On Question #74059 - Math - Differential Equations: Sin) - , (TДокумент3 страницыAnswer On Question #74059 - Math - Differential Equations: Sin) - , (TlekhaОценок пока нет
- Beams On Elastic FoundationДокумент20 страницBeams On Elastic FoundationShashi Bhushan KumarОценок пока нет
- Paper: Iit-Jam 2006Документ4 страницыPaper: Iit-Jam 2006Mr MОценок пока нет
- Free Vibrations of Simply Supported Beams Using Fourier SeriesДокумент17 страницFree Vibrations of Simply Supported Beams Using Fourier SeriesMauro GuerreiroОценок пока нет
- Chap3 4Документ6 страницChap3 4Dexter BrianОценок пока нет
- DPP - 40 - MДокумент2 страницыDPP - 40 - Mshalini singhОценок пока нет
- 1 Problem Statement: Advanced Theory of Vibrations (AE 721) Assignment No. 4Документ7 страниц1 Problem Statement: Advanced Theory of Vibrations (AE 721) Assignment No. 4Ali BaigОценок пока нет
- MHZ F E A E: Z-Direction in A Lossless MediumДокумент25 страницMHZ F E A E: Z-Direction in A Lossless MediumAzariusОценок пока нет
- EXERCISES For Chapter 2 of Calculus 1: T (Hours) T (Документ2 страницыEXERCISES For Chapter 2 of Calculus 1: T (Hours) T (Anh TrầnОценок пока нет
- Battiato Gastaldi FEM ReportДокумент39 страницBattiato Gastaldi FEM ReportChiara GastaldiОценок пока нет
- Relativity Notes PDFДокумент8 страницRelativity Notes PDFসায়ন চক্রবর্তীОценок пока нет
- Interpolation by SplinesДокумент18 страницInterpolation by SplinesKrystian XОценок пока нет
- 8c1c6cff 108工程機率ch3作業Документ3 страницы8c1c6cff 108工程機率ch3作業孔令洋Оценок пока нет
- Calculus Questions2019Документ5 страницCalculus Questions2019Martin NguyenОценок пока нет
- PureMaths1975 Pastpaper P2Документ3 страницыPureMaths1975 Pastpaper P2wltfОценок пока нет
- Paper: Iit-Jam 2005: B A C AДокумент4 страницыPaper: Iit-Jam 2005: B A C AMr MОценок пока нет
- Boundary Value ProblemsДокумент15 страницBoundary Value ProblemsShadman Saqlain Rahman, 170021057Оценок пока нет
- Vibration Frequencies For A Non-Uniform Beam With End MassДокумент9 страницVibration Frequencies For A Non-Uniform Beam With End MassThanyawut WansuwanОценок пока нет
- Probability DistributionДокумент17 страницProbability DistributionMasudur RahmanОценок пока нет
- X X L X X U U C U T L U T U: 12.3 Solution of One-Dimensional Wave EquationДокумент8 страницX X L X X U U C U T L U T U: 12.3 Solution of One-Dimensional Wave Equation4052-SRINJAY PAL-Оценок пока нет
- Jest 2015 PhysicsДокумент7 страницJest 2015 PhysicsRajesh MaitiОценок пока нет
- Zadachi Adin DEДокумент2 страницыZadachi Adin DERonaldo LópezОценок пока нет
- Tutorial Exercise - 5Документ5 страницTutorial Exercise - 5BelaynewОценок пока нет
- Tutorial - 1Документ5 страницTutorial - 1Rohan ZendeОценок пока нет
- Section-A: Time Allowed: 3 Hours Maximum Marks: 300Документ6 страницSection-A: Time Allowed: 3 Hours Maximum Marks: 300Vaity MaheshОценок пока нет
- IAS Mains Mathematics 2007Документ6 страницIAS Mains Mathematics 2007abhi_iitd20094668Оценок пока нет
- Lecture 02Документ25 страницLecture 02Nisa Cantika BaharОценок пока нет
- Closed Form Solution of The Natural Frequencies and Mode Shapes of A Tapered Torsional Shaft Clamped at One EndДокумент12 страницClosed Form Solution of The Natural Frequencies and Mode Shapes of A Tapered Torsional Shaft Clamped at One Endruleslb4304Оценок пока нет
- 1981PMДокумент6 страниц1981PMChong Ka LeeОценок пока нет
- Tutorial Sheet - 3 (Multiple Integrals)Документ3 страницыTutorial Sheet - 3 (Multiple Integrals)Dipankar NathОценок пока нет
- Uemm Engineering Analysis Formulae For UEMM3243: L CN K CДокумент4 страницыUemm Engineering Analysis Formulae For UEMM3243: L CN K CvikhramanОценок пока нет
- Maths TUT 7Документ1 страницаMaths TUT 7Rahul SehgalОценок пока нет
- 工數 Midterm IДокумент3 страницы工數 Midterm I丁乙凡Оценок пока нет
- Calculus III Problem Sheet 5: Chow Seng ChuДокумент2 страницыCalculus III Problem Sheet 5: Chow Seng ChuFredie LeeОценок пока нет
- Exercises For Calculus 1, Chapter 2 - Differentiation: (Friday Class)Документ2 страницыExercises For Calculus 1, Chapter 2 - Differentiation: (Friday Class)Duy AnhОценок пока нет
- Z I W I Z I Wi I: Assignment-List of ExamplesДокумент2 страницыZ I W I Z I Wi I: Assignment-List of Examplesηιяαν ραтєlОценок пока нет
- Invese Scattering Problem For Perturbed Bi Harmonic OperatorДокумент5 страницInvese Scattering Problem For Perturbed Bi Harmonic OperatorAsim AsrarОценок пока нет
- 12.12 Solution of PDE by Laplace Transform: T S T X W L S X W DT T X W e T X W LДокумент5 страниц12.12 Solution of PDE by Laplace Transform: T S T X W L S X W DT T X W e T X W L4052-SRINJAY PAL-Оценок пока нет
- If Are Partitions of Probability Space S: AB A B AB A BДокумент4 страницыIf Are Partitions of Probability Space S: AB A B AB A BgraceОценок пока нет
- Fill in The Blankets With Proper Answers (5 Marks Each, Total 40 Marks)Документ5 страницFill in The Blankets With Proper Answers (5 Marks Each, Total 40 Marks)adbeanОценок пока нет
- Boundary Value Problems: Dr. Suresh Kumar, BITS PilaniДокумент11 страницBoundary Value Problems: Dr. Suresh Kumar, BITS PilaniRahul SharmaОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)От EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)Оценок пока нет
- MATH 1D SyllabusДокумент4 страницыMATH 1D SyllabussituvnnОценок пока нет
- Order of Integration (Calculus) PDFДокумент4 страницыOrder of Integration (Calculus) PDFRafih Yahya100% (1)
- Appendix DДокумент63 страницыAppendix Darif_rubinОценок пока нет
- AodДокумент41 страницаAodAditya BansalОценок пока нет
- Structures: P.M. Stylianidis, D.A. Nethercot, B.A. Izzuddin, A.Y. ElghazouliДокумент16 страницStructures: P.M. Stylianidis, D.A. Nethercot, B.A. Izzuddin, A.Y. ElghazouliRatul RanjanОценок пока нет
- Moving Average Formula Excel TemplateДокумент5 страницMoving Average Formula Excel TemplateViji SambasivamОценок пока нет
- Problems Proposed by Vasc and Arqady - Amir Hossein ParvardiДокумент13 страницProblems Proposed by Vasc and Arqady - Amir Hossein Parvardimoka0687Оценок пока нет
- Estimation of The Mean and ProportionДокумент78 страницEstimation of The Mean and ProportionLenovoОценок пока нет
- RK Gill - ResearchGateДокумент7 страницRK Gill - ResearchGateSyed Beeban BashaОценок пока нет
- Nisfatin Rifkah Nurdiana 1910811021 Statistika: 1. Buatlah Analisa Deskriptifnya Dengan SpssДокумент21 страницаNisfatin Rifkah Nurdiana 1910811021 Statistika: 1. Buatlah Analisa Deskriptifnya Dengan SpssNisfatin Rifkah NurdianaОценок пока нет
- Polytechnic University of Puerto Rico ME 4130Документ7 страницPolytechnic University of Puerto Rico ME 4130dannyyukaОценок пока нет
- Lecture 28: Directional Derivatives, Gradient, Tangent PlaneДокумент2 страницыLecture 28: Directional Derivatives, Gradient, Tangent PlaneHesham ArifОценок пока нет
- Lab 1 - 2021197285 - Siti RaziatulДокумент23 страницыLab 1 - 2021197285 - Siti RaziatulRaz SyiqОценок пока нет
- TECH 707 Separating A Mixture of Biphenyl, Benzhydrol, and Benzophenone by TLCДокумент3 страницыTECH 707 Separating A Mixture of Biphenyl, Benzhydrol, and Benzophenone by TLCsadaf_5Оценок пока нет
- Multi-Objective Goal Attainment Optimization - MATLAB & Simulink ExampleДокумент6 страницMulti-Objective Goal Attainment Optimization - MATLAB & Simulink ExampleYutaka TakaharaОценок пока нет
- Forecasting: Course: Production & Operation Analysis Effective Period: September 2015Документ66 страницForecasting: Course: Production & Operation Analysis Effective Period: September 2015AfifahSeptiaОценок пока нет
- Measurement and Scaling TechniquesДокумент28 страницMeasurement and Scaling TechniquesRiya PandeyОценок пока нет
- Data Analyst RoadmapДокумент5 страницData Analyst Roadmapyogesh patilОценок пока нет
- STEEL DESIGN - Column Summary DesignДокумент1 страницаSTEEL DESIGN - Column Summary DesignOsama MamdouhОценок пока нет
- Kiroga - The Role of Information Technology in Strategic ManagementДокумент41 страницаKiroga - The Role of Information Technology in Strategic Managementphilip mahamaОценок пока нет
- Lab No 3Документ4 страницыLab No 3Farhan Khan NiaZiОценок пока нет
- CH 02 - Descriptive Statistics Multiple Choice: Page 1Документ60 страницCH 02 - Descriptive Statistics Multiple Choice: Page 1RAGDARI DX-RAGОценок пока нет
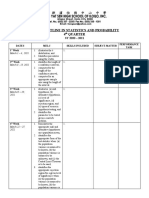
- Course Outline in Statistics and Probability 4 Quarter: Dates Melc Skills Included Subject-Matter Performance Task 1 WeekДокумент2 страницыCourse Outline in Statistics and Probability 4 Quarter: Dates Melc Skills Included Subject-Matter Performance Task 1 WeekTiffany Joy Lencioco GambalanОценок пока нет
- Long and Synthetic DivisionДокумент8 страницLong and Synthetic Divisionlorraine dionelaОценок пока нет
- Worksheet 5 FunctionsДокумент7 страницWorksheet 5 FunctionsSong LyricsОценок пока нет