Вам также может понравиться
- IT Essentials (Versión 7.00) - IT Essentials 7.01 Examen Final CH 1 - 14 Version 3Документ72 страницыIT Essentials (Versión 7.00) - IT Essentials 7.01 Examen Final CH 1 - 14 Version 3Gustavo Adolfo Diaz50% (2)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОт EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОценок пока нет
- Ejercicios para BIOS AcabadosДокумент2 страницыEjercicios para BIOS AcabadosMiguel SanchezОценок пока нет
- PC XT Cruz Ferreyros LaymeДокумент79 страницPC XT Cruz Ferreyros LaymeFrank CruzОценок пока нет
- Hardware PC XT 8088 8086Документ40 страницHardware PC XT 8088 8086Rousver Ruben Quicaña GarayОценок пока нет
- PC XTДокумент14 страницPC XTROBEL LIZANDRO VILCA QUISPEОценок пока нет
- Arquitectura de Computadoras PersonalesДокумент27 страницArquitectura de Computadoras PersonalesNatyОценок пока нет
- Sistema Minimo Micro 8088Документ4 страницыSistema Minimo Micro 8088miguelon04Оценок пока нет
- Tarea1 - PC XT Flores - Lopez - MendozaДокумент22 страницыTarea1 - PC XT Flores - Lopez - MendozaAthos Nikolai Campana VeraОценок пока нет
- Hardware PC XT 8088 8086 - GUTIERREZ - PARIZACA PDFДокумент31 страницаHardware PC XT 8088 8086 - GUTIERREZ - PARIZACA PDFEGO 2014Оценок пока нет
- Diferencia Entre Un Microprocesador y Un MicrocontroladorДокумент7 страницDiferencia Entre Un Microprocesador y Un MicrocontroladorIrving Jesus Sanchez CamposОценок пока нет
- Lab 2 PCДокумент6 страницLab 2 PCJesus HuamaniОценок пока нет
- Vdocuments - MX Operacion de Micros e InterfacesДокумент29 страницVdocuments - MX Operacion de Micros e Interfacesmario floresОценок пока нет
- R. A. 1.1 Componentes Del MicroprocesadorДокумент29 страницR. A. 1.1 Componentes Del MicroprocesadorJOSE GILBERTO CANO GREENEОценок пока нет
- Exposicion de ProcesadoresДокумент21 страницаExposicion de ProcesadoresJose Jimenez Coto100% (1)
- Los Microprocesadores 8086,8088,80386Документ12 страницLos Microprocesadores 8086,8088,80386CrisОценок пока нет
- Arquitectura MicroprocesadoresДокумент16 страницArquitectura MicroprocesadoresMonserrat MejíaОценок пока нет
- Intel 286Документ3 страницыIntel 286HernanОценок пока нет
- Ensamblador 8088/8086, Direccionamiento y Programación, Juego de Instrucciones Manual INTELДокумент36 страницEnsamblador 8088/8086, Direccionamiento y Programación, Juego de Instrucciones Manual INTELMarco Calizaya MartinezОценок пока нет
- Guia Lab2016BДокумент10 страницGuia Lab2016BJosé ArturoОценок пока нет
- CgrwyДокумент17 страницCgrwyKevin SosaОценок пока нет
- Arquitectura Del Microprocesador 80286Документ20 страницArquitectura Del Microprocesador 80286Richard vega marcelo100% (1)
- Arq. Computador. Practica 5 - CompletadaДокумент11 страницArq. Computador. Practica 5 - CompletadaCristofer Nuñez CorporanОценок пока нет
- Guía Arquitectura de HardwareДокумент7 страницGuía Arquitectura de HardwarealfonsoОценок пока нет
- Informe DescriptivoДокумент13 страницInforme Descriptivowilson moyaОценок пока нет
- Tarea1 Investigacion MicrocontroladoresДокумент19 страницTarea1 Investigacion MicrocontroladoresGIOVANIОценок пока нет
- Micro Control AdoresДокумент30 страницMicro Control AdoresRicardo Garcia MelendezОценок пока нет
- La Arquitectura Del Computador XTДокумент10 страницLa Arquitectura Del Computador XTJorge NovoaОценок пока нет
- Unidad 5. Los Procesadores - Arquitectura de ComputadorasДокумент26 страницUnidad 5. Los Procesadores - Arquitectura de ComputadorasJuan CarlosОценок пока нет
- Tipos y Velocidades de ProcesadoresДокумент6 страницTipos y Velocidades de ProcesadoresEdgar FabraОценок пока нет
- TareaДокумент27 страницTareaIsaac OrozcoОценок пока нет
- Familia Microprocesadores X86Документ12 страницFamilia Microprocesadores X86Lucas Matías JuarezОценок пока нет
- Socket de Los ProcesadoresДокумент17 страницSocket de Los ProcesadoresEdgardo Antonio Turcios Salgado100% (1)
- Actividad5 SofialopezДокумент9 страницActividad5 SofialopezSofía López GarcíaОценок пока нет
- Lab-7-2015b Arquitectura de ComputadorasДокумент31 страницаLab-7-2015b Arquitectura de ComputadorasAnderson MarkОценок пока нет
- Intel 8086 y 8088Документ31 страницаIntel 8086 y 8088J'Huanay Heaskin ArletОценок пока нет
- TC1 31Документ26 страницTC1 31nestor240385Оценок пока нет
- Microprocesador Intel 4004Документ3 страницыMicroprocesador Intel 4004Erick MontoyaОценок пока нет
- 1 Parcial de Microprocesadores VirtualДокумент4 страницы1 Parcial de Microprocesadores VirtualjuanitoОценок пока нет
- 5SB - Equipo 02 - Diagrama de ProcesadorДокумент12 страниц5SB - Equipo 02 - Diagrama de ProcesadorKenshin Ancona PerezОценок пока нет
- Intel 386Документ26 страницIntel 386joseph_arce_7Оценок пока нет
- Arquitectura de Computadoras 2018Документ26 страницArquitectura de Computadoras 2018CarlosОценок пока нет
- Intel 8086 y 8088Документ20 страницIntel 8086 y 8088Zarate BismkОценок пока нет
- Evolución de Las CPU Usadas en Los PCДокумент9 страницEvolución de Las CPU Usadas en Los PCCigottoОценок пока нет
- El Microprocesador 8085Документ11 страницEl Microprocesador 8085neptuno97Оценок пока нет
- Chipset Ensamble ComponentesДокумент16 страницChipset Ensamble ComponentesFernando LópezОценок пока нет
- Informe MicrocontroladoresДокумент19 страницInforme MicrocontroladoresJonathan CorreaОценок пока нет
- Microprocesadores y Placas BaseДокумент14 страницMicroprocesadores y Placas BaseMiguel PérezОценок пока нет
- Arquitectura y Diseño de Seguridad Resumen 3Документ16 страницArquitectura y Diseño de Seguridad Resumen 3Miguel Angel Vargas ReynosoОценок пока нет
- Actividad Placa BaseДокумент11 страницActividad Placa BasealexmendozamaestreОценок пока нет
- Tarea de Arquitectura.1Документ12 страницTarea de Arquitectura.1Anonymous P0PJwz1Оценок пока нет
- In For MeДокумент35 страницIn For MeEsmeralda Condori MelgarОценок пока нет
- TEMA 1c. Placa BaseДокумент27 страницTEMA 1c. Placa BaseConstantin Laurentis IrmilikОценок пока нет
- CUESTIONARIO PARA Examen-Mantenimiento-Reparacion-ComputadorasДокумент53 страницыCUESTIONARIO PARA Examen-Mantenimiento-Reparacion-ComputadorasBlut NashiОценок пока нет
- Tipos y Velocidades de ProcesadoresДокумент12 страницTipos y Velocidades de ProcesadoresJuan ValenciaОценок пока нет
- Guía Arq U2Документ7 страницGuía Arq U2Melissa HernandezОценок пока нет
- Laboratorio 1Документ23 страницыLaboratorio 1YEFERSONОценок пока нет
- Micros Lista 06Документ19 страницMicros Lista 06pmfornerisОценок пока нет
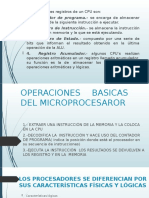
- Operaciones Basicas Del Microprocesaror 1Документ22 страницыOperaciones Basicas Del Microprocesaror 1jesusОценок пока нет
- Procesadores, Sistemas OperativosДокумент53 страницыProcesadores, Sistemas OperativospoguirriОценок пока нет
- Intel Pentium p5Документ15 страницIntel Pentium p5Carlos GuerreroОценок пока нет
- Buses de ExpansionДокумент6 страницBuses de ExpansionKelmer Ashley Comas CardonaОценок пока нет
- Manual POV-RayДокумент152 страницыManual POV-RayprincezitaОценок пока нет
- Taller #3 - Arquitectura 386 CompletadoДокумент19 страницTaller #3 - Arquitectura 386 CompletadoSantiago Riaño LadinoОценок пока нет
- Cuadro Sinoptico Del Hardware 3 2Документ2 страницыCuadro Sinoptico Del Hardware 3 2df3543473Оценок пока нет
- Manual de Uso y Aplicaciones Logic 1 1Документ71 страницаManual de Uso y Aplicaciones Logic 1 1martin marcucciОценок пока нет
- Todo ComputadorasДокумент231 страницаTodo ComputadorasAlberto Cid Morales100% (1)
- Caso DellДокумент5 страницCaso DellluisaОценок пока нет
- PRACTICO 2 Dafne Nicole Vidal VacaДокумент22 страницыPRACTICO 2 Dafne Nicole Vidal VacaVidal Vaca Dafne NicoleОценок пока нет
- Cisco Examen Capitulo 4Документ4 страницыCisco Examen Capitulo 4Oscar Joao Perez MoralesОценок пока нет
- Introducción A La InformáticaДокумент96 страницIntroducción A La InformáticaDavid GallardoОценок пока нет
- Configuración Del BiosДокумент39 страницConfiguración Del Biosパイナップル エマニュエル100% (1)
- Examen de Mantenimiento de PCДокумент6 страницExamen de Mantenimiento de PCJonathan OleasОценок пока нет
- Syllabus - Reparación de ComputadorasДокумент2 страницыSyllabus - Reparación de ComputadorasEmanuel Joel HuamantallaОценок пока нет
- Horner PLC ManualДокумент84 страницыHorner PLC ManualJavier SolisОценок пока нет
- System Requirements SPДокумент10 страницSystem Requirements SPWilliam QuirogaОценок пока нет
- Hardware 2Документ40 страницHardware 2سيد حساب سيد حسابОценок пока нет
- ARQUITECTURAДокумент15 страницARQUITECTURADavid ValenciaОценок пока нет
- Presupuesto Juan Manuel CardonaДокумент3 страницыPresupuesto Juan Manuel CardonaJuanManuelCardonaОценок пока нет
- Origen y Desarrollo de Las Computadoras PersonalesДокумент6 страницOrigen y Desarrollo de Las Computadoras PersonalesHamzter MontesОценок пока нет
- Plaqueta Universal para PC: (Posee Salida para Conector)Документ4 страницыPlaqueta Universal para PC: (Posee Salida para Conector)Rodrymix SoriaОценок пока нет
- Actividad Semana 1-3Документ12 страницActividad Semana 1-3LUIGI davian patiño cardonaОценок пока нет
- Ordenadores IДокумент7 страницOrdenadores IDennisRamirezOjopiОценок пока нет
- SESIÓN - EPT - Placa MadreДокумент10 страницSESIÓN - EPT - Placa MadreAlfonsoОценок пока нет
- Libro de Hardware 1 v4 Unah Vs Ihct 8 Septiembre 2014Документ316 страницLibro de Hardware 1 v4 Unah Vs Ihct 8 Septiembre 2014MarioRubioОценок пока нет
- Texto y Guía Del Alumno: C O O (0 3 QДокумент87 страницTexto y Guía Del Alumno: C O O (0 3 QLilian PreciadoОценок пока нет
- Sistema Operativo Netware de Novell v.5Документ31 страницаSistema Operativo Netware de Novell v.5Jose Montania ScarpelliniОценок пока нет
- La Tarjeta Madre o MainboardДокумент18 страницLa Tarjeta Madre o MainboardJesus PatiñoОценок пока нет
- Generaciones de La ComputadoraДокумент13 страницGeneraciones de La ComputadoraĞřîşēłđå ÇøåqųīřäОценок пока нет