Вам также может понравиться
- Dd03 Proiect Self ParkingДокумент29 страницDd03 Proiect Self ParkingIlie IulianОценок пока нет
- Case Study (Balancing Robot)Документ10 страницCase Study (Balancing Robot)Homer Jay ManabatОценок пока нет
- 1-Servo Motor Control Using ArduinoДокумент12 страниц1-Servo Motor Control Using Arduinosebas.lopez1202Оценок пока нет
- American University of Science & Technology: Faculty of Engineering Department of Mechatronics EngineeringДокумент11 страницAmerican University of Science & Technology: Faculty of Engineering Department of Mechatronics EngineeringDani Hajj Ali SleimanОценок пока нет
- Microcontroller Based Robotic ArmДокумент5 страницMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- Solarise Pick and Place Robot: SynopsisДокумент10 страницSolarise Pick and Place Robot: SynopsisSameer SalamОценок пока нет
- A Report of Mini Project Line Following Robot Car Using ArdinoДокумент10 страницA Report of Mini Project Line Following Robot Car Using Ardinorao asad0% (1)
- Servo Encoder LabДокумент8 страницServo Encoder LabGoran MiljkovicОценок пока нет
- Chapter 4Документ11 страницChapter 4المهندس. EОценок пока нет
- 418 Automatic Railway Gate Control SystemДокумент27 страниц418 Automatic Railway Gate Control SystemRam VBIT100% (1)
- Joe Project RobotДокумент19 страницJoe Project RobotTiruveedula RishendraОценок пока нет
- Lab 3Документ6 страницLab 3Vu LeОценок пока нет
- Voice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoДокумент3 страницыVoice and Touch Screen Based Direction and Speed Control of Wheel Chair For Physically Challenged Using ArduinoseventhsensegroupОценок пока нет
- Short Range Radar SystemДокумент14 страницShort Range Radar SystemHoomi ShbОценок пока нет
- Marcin SZAREK, Gözde ÖZCAN (Biped Robot)Документ13 страницMarcin SZAREK, Gözde ÖZCAN (Biped Robot)Mspavan RaoОценок пока нет
- Touch Screen Controlled Wheel ChairДокумент5 страницTouch Screen Controlled Wheel Chairnirajthakkar100% (2)
- Parallel Parking RC CarДокумент15 страницParallel Parking RC CarazmyzumaОценок пока нет
- Traffic ControlДокумент29 страницTraffic ControlacroaliОценок пока нет
- Stepper Motor TutorialДокумент6 страницStepper Motor TutorialengrodeОценок пока нет
- 1.1 Objective:: MBICTДокумент47 страниц1.1 Objective:: MBICTsagarparikh31yahoo_cОценок пока нет
- Mechatronics System Design - MECA 443 Lab Experiment 4 - Stepper Motor ControlДокумент6 страницMechatronics System Design - MECA 443 Lab Experiment 4 - Stepper Motor ControlAli ChallakОценок пока нет
- Introduction To Accelerometer Controlled Wheel ChairДокумент26 страницIntroduction To Accelerometer Controlled Wheel Chairpradeep100% (1)
- How To Build An Omni Wheels RobotДокумент10 страницHow To Build An Omni Wheels RobotJonty ChanduОценок пока нет
- Quadcopter PDFДокумент14 страницQuadcopter PDFabhiarora4100% (1)
- Mechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderДокумент6 страницMechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderAli ChallakОценок пока нет
- Final Report - EHDcodeДокумент13 страницFinal Report - EHDcodeShreya AgrawalОценок пока нет
- Automatic Railway Gate Controlling SystemДокумент70 страницAutomatic Railway Gate Controlling Systemnarendar32Оценок пока нет
- Line Follower RobotДокумент16 страницLine Follower RobotRohit sharmaОценок пока нет
- 1.abstract: Unmanned Automated Railway Gate ControllerДокумент70 страниц1.abstract: Unmanned Automated Railway Gate ControllerDineshОценок пока нет
- Hand Gesture Control Robot PDFДокумент3 страницыHand Gesture Control Robot PDFMd IrfanОценок пока нет
- Project Report On Obstacel Detector Using 7404Документ43 страницыProject Report On Obstacel Detector Using 7404Hemal Patel100% (2)
- Encoder (Lab 2)Документ15 страницEncoder (Lab 2)brasengan6Оценок пока нет
- Advance Surveillance Using 1 Degree Transformer Robot: Department O F Electronics & Communication EngineeringДокумент26 страницAdvance Surveillance Using 1 Degree Transformer Robot: Department O F Electronics & Communication EngineeringAshish ChaurasiaОценок пока нет
- Autonomous VehicleДокумент7 страницAutonomous VehicleRickson Viahul Rayan CОценок пока нет
- Automobile Dashboard Integration With IOT Google AssistanceДокумент17 страницAutomobile Dashboard Integration With IOT Google AssistanceaaОценок пока нет
- Automatic Railway Gate Control System Using Arduino Uno PresentationДокумент20 страницAutomatic Railway Gate Control System Using Arduino Uno PresentationRio Martin100% (1)
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsДокумент5 страницA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanОценок пока нет
- Stepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaДокумент18 страницStepper Motor - Parallel Port Interface by Jose Rene Flores and Jaime ZavalaMufasa SiddiquiОценок пока нет
- Line Follower Robot Using LabVIEWДокумент6 страницLine Follower Robot Using LabVIEWTrần Huy Vinh QuangОценок пока нет
- A Low-Cost Mirror Mount Control System For Optics SetupsДокумент11 страницA Low-Cost Mirror Mount Control System For Optics SetupsAbou AyhamОценок пока нет
- Mini Project SrihariДокумент14 страницMini Project SrihariAshik GRОценок пока нет
- Ijte 07 01 004Документ9 страницIjte 07 01 004Lê QuýОценок пока нет
- Speedometer-Cum-odometer For MotorbikeДокумент6 страницSpeedometer-Cum-odometer For MotorbikeAnonymous 8pCXXs100% (2)
- A New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino MicrocontrollerДокумент6 страницA New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontrollerرشيد بن صغيرОценок пока нет
- ACCELEROMETER Gesture Controlled WheelchairДокумент24 страницыACCELEROMETER Gesture Controlled Wheelchairamarshirodkar23100% (1)
- Arjun Nagappan (Asn28) Arjun Prakash (Asp36) : Side View of RC CarДокумент111 страницArjun Nagappan (Asn28) Arjun Prakash (Asp36) : Side View of RC CarSanjeev TarigopulaОценок пока нет
- Automatic Railway Gate Control System Using Arduino Uno PresentationДокумент19 страницAutomatic Railway Gate Control System Using Arduino Uno PresentationRio MartinОценок пока нет
- Arduino Model Train ControllerДокумент9 страницArduino Model Train ControlleritzanhОценок пока нет
- A Mobile Platform For Nursing Robot 1985Документ14 страницA Mobile Platform For Nursing Robot 1985mohsindalvi87Оценок пока нет
- Assem ManualДокумент33 страницыAssem ManualMenandro AmbanlocОценок пока нет
- Micro Controller Controlled Servo Motor With Keypad InputДокумент3 страницыMicro Controller Controlled Servo Motor With Keypad InputUsman WaheedОценок пока нет
- Touch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoДокумент4 страницыTouch Screen and Accelerometer Based Wireless Motor Speed and Direction Controlling System Using ArduinoseventhsensegroupОценок пока нет
- B.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARДокумент11 страницB.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARMohammad Tarique Mumtaz100% (1)
- Project Report: Obstacle Avoiding 4WD Arduino RobotДокумент12 страницProject Report: Obstacle Avoiding 4WD Arduino RobotLahmeen HaiderОценок пока нет
- Design Implementation and Control of A H PDFДокумент11 страницDesign Implementation and Control of A H PDFNikhil HasabiОценок пока нет
- Labview Experiment 2 Motor Speed Control Using Usb and Arduino DaqsДокумент11 страницLabview Experiment 2 Motor Speed Control Using Usb and Arduino DaqsTanNguyễnОценок пока нет
- Institute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotДокумент44 страницыInstitute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotTwinkle SinghОценок пока нет
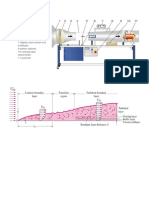
- 1 Inlet Contour, 2 Flow Straightener, 3 Nozzle, 4 Measuring Section, 5 Model, 6 Force Sensor, 7 Display and Control Unit, 8 Diffuser, 9 Switch Cabinet, 10 Inclined Tube Manometer, 11 Axial FanДокумент1 страница1 Inlet Contour, 2 Flow Straightener, 3 Nozzle, 4 Measuring Section, 5 Model, 6 Force Sensor, 7 Display and Control Unit, 8 Diffuser, 9 Switch Cabinet, 10 Inclined Tube Manometer, 11 Axial FanDivyansh BansalОценок пока нет
- Print 3Документ1 страницаPrint 3Divyansh BansalОценок пока нет
- Feed Check Valve PDFДокумент1 страницаFeed Check Valve PDFDivyansh Bansal0% (1)
- Steering WheelДокумент5 страницSteering WheelDivyansh BansalОценок пока нет
- Vane Position Vs Power at Shaft PДокумент1 страницаVane Position Vs Power at Shaft PDivyansh BansalОценок пока нет
- Torque at Turbine Shaft Vs SpeedДокумент1 страницаTorque at Turbine Shaft Vs SpeedDivyansh BansalОценок пока нет
- Observations and Calculations: Ab HydДокумент1 страницаObservations and Calculations: Ab HydDivyansh BansalОценок пока нет
- Torque at Turbine Shaft Vs SpeedДокумент1 страницаTorque at Turbine Shaft Vs SpeedDivyansh BansalОценок пока нет
- Summary Pub DLR 150901Документ8 страницSummary Pub DLR 150901Divyansh BansalОценок пока нет
- CrackzsoftДокумент1 страницаCrackzsoftDivyansh BansalОценок пока нет
- Pipe FittingsДокумент1 страницаPipe FittingsDivyansh BansalОценок пока нет
- ATI Aerosol Photometer & Aerosol Generator Basics: NAFA Meeting April 18, 2012 Scottsdale, AZДокумент41 страницаATI Aerosol Photometer & Aerosol Generator Basics: NAFA Meeting April 18, 2012 Scottsdale, AZDivyansh BansalОценок пока нет
- CIM BlogДокумент1 страницаCIM BlogDivyansh BansalОценок пока нет
- Graphs For Variable Motor Load: Pump Efficiency Vs DischargeДокумент5 страницGraphs For Variable Motor Load: Pump Efficiency Vs DischargeDivyansh BansalОценок пока нет
- Heat LabДокумент4 страницыHeat LabDivyansh BansalОценок пока нет
- Print 2Документ2 страницыPrint 2Divyansh BansalОценок пока нет
- Catálogo RYMSA 2010Документ165 страницCatálogo RYMSA 2010Manuel PalaciosОценок пока нет
- Annex IV - A - LABORATORY Requirements For Chem and PhysicsДокумент8 страницAnnex IV - A - LABORATORY Requirements For Chem and PhysicspicefeatiОценок пока нет
- 2 Protection Course - Overview Protection PDFДокумент53 страницы2 Protection Course - Overview Protection PDFZaid ChelseaОценок пока нет
- ATS22 Modbus Address WordsДокумент21 страницаATS22 Modbus Address WordsASTERIXОценок пока нет
- ECEN 2632 Chapter 3Документ5 страницECEN 2632 Chapter 3tyutyuОценок пока нет
- Cell Phone Jammer Final ReportДокумент10 страницCell Phone Jammer Final ReportujwaljaiswalОценок пока нет
- TPK-2W The TPK Series Are Miniature, Isolated 2W DC/DC Converters in A SIP Package.Документ3 страницыTPK-2W The TPK Series Are Miniature, Isolated 2W DC/DC Converters in A SIP Package.toppowerОценок пока нет
- TransformersДокумент134 страницыTransformersGerald Boy100% (1)
- A. Identify and Familiarize Yourself With The Following Parts of The Microscope and Their FunctionsДокумент5 страницA. Identify and Familiarize Yourself With The Following Parts of The Microscope and Their FunctionsFaye AquinoОценок пока нет
- Datasheet: 5535/5545 Accelerometer Signal ConditionerДокумент3 страницыDatasheet: 5535/5545 Accelerometer Signal ConditionerAllen BradleyОценок пока нет
- CD4001BC/CD4011BC Quad 2-Input NOR Buffered B Series Gate - Quad 2-Input NAND Buffered B Series GateДокумент9 страницCD4001BC/CD4011BC Quad 2-Input NOR Buffered B Series Gate - Quad 2-Input NAND Buffered B Series GateJexel GomezОценок пока нет
- Lab Experiment 4Документ4 страницыLab Experiment 4Saad AliKhanОценок пока нет
- Assembly Kits For 3VA Molded Case Circuit Breakers SIVACON S4 201612151418084694Документ28 страницAssembly Kits For 3VA Molded Case Circuit Breakers SIVACON S4 201612151418084694cc_bauОценок пока нет
- Hantek LCR Hantek1833C Manual PDFДокумент32 страницыHantek LCR Hantek1833C Manual PDFJuan Ramírez100% (1)
- Delay Calculations: Introduction To Cmos Vlsi DesignДокумент27 страницDelay Calculations: Introduction To Cmos Vlsi DesignbiboОценок пока нет
- SSC Apg001 enДокумент20 страницSSC Apg001 enapi-279886039Оценок пока нет
- MN 2 011 32Документ3 страницыMN 2 011 32Chris AshleyОценок пока нет
- Tittle of Internship: Department of Electrical & Electronics EngineeringДокумент15 страницTittle of Internship: Department of Electrical & Electronics EngineeringmadhulavОценок пока нет
- Notes On DC Track CircuitДокумент50 страницNotes On DC Track CircuitVikas Srivastav94% (16)
- Phase I.M DriveДокумент4 страницыPhase I.M DriveJournalNX - a Multidisciplinary Peer Reviewed JournalОценок пока нет
- Staircase Modulating TechniqueДокумент5 страницStaircase Modulating TechniqueMayur ChavdaОценок пока нет
- Samsung HW F750Документ62 страницыSamsung HW F750boroda2410Оценок пока нет
- DYN110794 Technical BulletinДокумент4 страницыDYN110794 Technical BulletinGolbert GolbiОценок пока нет
- Powerscale 10-50 Kva: User ManualДокумент101 страницаPowerscale 10-50 Kva: User ManualaarianОценок пока нет
- Axpert KS 1 5KVA - Manual - 20160301 PDFДокумент35 страницAxpert KS 1 5KVA - Manual - 20160301 PDFjasonsivertsenОценок пока нет
- Psan Series: Digital Pressure Sensor (Fluid Type)Документ0 страницPsan Series: Digital Pressure Sensor (Fluid Type)VIJAYPORОценок пока нет
- Piezo Copolymer Coaxial CableДокумент2 страницыPiezo Copolymer Coaxial CableJose Miguel Madrid ReinaОценок пока нет
- Applications: 11-4 ACSRДокумент3 страницыApplications: 11-4 ACSRJuan Carlos Vivas GuioОценок пока нет
- Hrvs DN 0210 PDFДокумент182 страницыHrvs DN 0210 PDFJefferson Mosquera PerezОценок пока нет
- Course Code: EEE 1102 Course Title: Electrical Circuits I LabДокумент6 страницCourse Code: EEE 1102 Course Title: Electrical Circuits I LabSalah Uddin MridhaОценок пока нет
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsОт EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesОт EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosОт EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosРейтинг: 5 из 5 звезд5/5 (1)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesОт EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesРейтинг: 5 из 5 звезд5/5 (1)
- Shorting the Grid: The Hidden Fragility of Our Electric GridОт EverandShorting the Grid: The Hidden Fragility of Our Electric GridРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialОт EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialРейтинг: 3.5 из 5 звезд3.5/5 (3)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОт EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialОценок пока нет
- Introduction to Power System ProtectionОт EverandIntroduction to Power System ProtectionРейтинг: 5 из 5 звезд5/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentОт EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Analog Design and Simulation Using OrCAD Capture and PSpiceОт EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceОценок пока нет
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tОт EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsОт EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonОт EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonРейтинг: 5 из 5 звезд5/5 (2)
- A Pathway to Decarbonise the Shipping Sector by 2050От EverandA Pathway to Decarbonise the Shipping Sector by 2050Оценок пока нет
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersОт Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersРейтинг: 5 из 5 звезд5/5 (1)