Вам также может понравиться
- Sistema Mecánico y Eléctrico del Automóvil.: Tecnología automotriz: mantenimiento y reparación de vehículosОт EverandSistema Mecánico y Eléctrico del Automóvil.: Tecnología automotriz: mantenimiento y reparación de vehículosРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Workbook Reto de La MariposaДокумент14 страницWorkbook Reto de La MariposaCarolina Castro V100% (1)
- Cálculo de la ventilación en residencial y terciario con CE3X y normativaДокумент13 страницCálculo de la ventilación en residencial y terciario con CE3X y normativajlruizmat8679Оценок пока нет
- Tabla 2 - Distribución T-Student-1Документ2 страницыTabla 2 - Distribución T-Student-1Marcelo Paz0% (1)
- Tabla-T StudentДокумент2 страницыTabla-T StudentDrámeterОценок пока нет
- Propiedades Del Agua Saturada (Cengel)Документ1 страницаPropiedades Del Agua Saturada (Cengel)Mario José100% (1)
- ENSILAJE: CONSERVACIÓN DE FORRAJES EN SILOSДокумент7 страницENSILAJE: CONSERVACIÓN DE FORRAJES EN SILOSYuliet Castaño50% (2)
- Agua caliente flota sobre agua fríaДокумент4 страницыAgua caliente flota sobre agua fríaSirLacroix100% (1)
- Qué es la idea temáticaДокумент1 страницаQué es la idea temáticajjacccobinoОценок пока нет
- Metodologia Proy Automatizacion - 150131Документ98 страницMetodologia Proy Automatizacion - 150131Jeffrey A. ParedesОценок пока нет
- Sin Cos Tan PDFДокумент4 страницыSin Cos Tan PDFRul AdzanaОценок пока нет
- Solucionario Examen Parcial 2020-1Документ19 страницSolucionario Examen Parcial 2020-1Josue Velasquez NavarroОценок пока нет
- Práctica 1Документ15 страницPráctica 1luis rodriguezОценок пока нет
- TABLAS (VAcontinuas)Документ11 страницTABLAS (VAcontinuas)gisiОценок пока нет
- Tarea6 - MartinezCampistranoJuanMisaelДокумент4 страницыTarea6 - MartinezCampistranoJuanMisaelGaspariin GpОценок пока нет
- Unt Levantamiento Topográfico Mediante Poligonal AbiertaДокумент16 страницUnt Levantamiento Topográfico Mediante Poligonal AbiertacyntigonzalesОценок пока нет
- Dugarna 2-AnexosPropiedadesДокумент8 страницDugarna 2-AnexosPropiedadesJorge RiveraОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentVictor RaulОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentMaribel TCОценок пока нет
- Coeficienes de Aproximación A Un Término y Función de BesselДокумент1 страницаCoeficienes de Aproximación A Un Término y Función de BesselLuis FernandezОценок пока нет
- Tabla Distribucion T de Student 405324 Downloable 3344236Документ2 страницыTabla Distribucion T de Student 405324 Downloable 3344236oscar quintanaОценок пока нет
- Tablas Momento 4Документ6 страницTablas Momento 4luis angelОценок пока нет
- Unidad 4Документ9 страницUnidad 4Adriana trujillo peraltaОценок пока нет
- Tabla TДокумент2 страницыTabla TadisonОценок пока нет
- Practicas SimulacionДокумент15 страницPracticas SimulacionOsvaldo MorenoОценок пока нет
- Eolicas S-6Документ83 страницыEolicas S-6Yurico VergaraОценок пока нет
- Activida N 3 HIDRAULICAДокумент6 страницActivida N 3 HIDRAULICADIEGO KOPP ORJUELAОценок пока нет
- Gráficas y Formulas-Iris Alondra Gómez RodríguezДокумент6 страницGráficas y Formulas-Iris Alondra Gómez RodríguezAlondra GómezОценок пока нет
- Tabla 2 - Distribución T-Student-2Документ2 страницыTabla 2 - Distribución T-Student-2Ivan Rudy Arroyo CamacuariОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentJorGe SaliNas MaManiОценок пока нет
- Tabla T Distribución T de StudentДокумент1 страницаTabla T Distribución T de StudentMaría José Correa GuzmánОценок пока нет
- Tabla de Valores de t de StudentДокумент1 страницаTabla de Valores de t de StudentJoel100% (1)
- Primera Simu Manual CompletaДокумент18 страницPrimera Simu Manual CompletaDayanara RuizОценок пока нет
- TABLASДокумент4 страницыTABLASKaterine RuizОценок пока нет
- Tabla D1 AireДокумент21 страницаTabla D1 AireAdolfo Rojas ArellanoОценок пока нет
- Diagrama de Fadum y IsobarasДокумент6 страницDiagrama de Fadum y IsobarasGianedgar Ynoñan LlauceОценок пока нет
- Tablas Estadisticas - ColorДокумент13 страницTablas Estadisticas - Colorjhorch toledoОценок пока нет
- Tabla 2 - Distribución T-Student PDFДокумент2 страницыTabla 2 - Distribución T-Student PDFdacova84Оценок пока нет
- Tabla 2 - Distribución T-Student PDFДокумент2 страницыTabla 2 - Distribución T-Student PDFAlejandro Morante MedranoОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentsharonОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentdarioОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentarthurОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentwillianОценок пока нет
- Tabla 2 - Distribución T-Student PDFДокумент2 страницыTabla 2 - Distribución T-Student PDFJunior TapiaОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-StudentCesar CastrejonОценок пока нет
- Tabla 2 - Distribución T-StudentДокумент2 страницыTabla 2 - Distribución T-Studentjuan carlos gomez sucasaireОценок пока нет
- TABLA 2 - DISTRIBUCIÓN T-STUDENTДокумент2 страницыTABLA 2 - DISTRIBUCIÓN T-STUDENTantonyjesusquerebalusanchezОценок пока нет
- Practica MUA.Документ11 страницPractica MUA.Thiago AguilarОценок пока нет
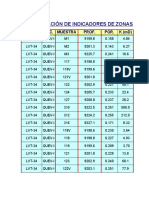
- Determinación de Indicadores de Zonas de Flujo (Fzi) : Núcleo Yac. Muestra Prof. POR. K (MD)Документ26 страницDeterminación de Indicadores de Zonas de Flujo (Fzi) : Núcleo Yac. Muestra Prof. POR. K (MD)VerónicaLilibethОценок пока нет
- Ensayo #5Документ10 страницEnsayo #5Pablo VenturaОценок пока нет
- Ensayo tracción desplazamiento fuerza deformaciónДокумент147 страницEnsayo tracción desplazamiento fuerza deformaciónCristian CgpОценок пока нет
- Copia de Hidraulica - Proyecto1Документ28 страницCopia de Hidraulica - Proyecto1Christian OrtizОценок пока нет
- Transferencia de Calor y Masa Tablas de AguaДокумент1 страницаTransferencia de Calor y Masa Tablas de AguaMaria Jose Gomez RondonОценок пока нет
- MRU Carrito Aire PoleaДокумент16 страницMRU Carrito Aire PoleaLuis Guillermo Vega BacilliОценок пока нет
- TALLER 3 HidrologíaДокумент30 страницTALLER 3 HidrologíaOMAR YESID LEANDRO AYALAОценок пока нет
- PSEUDOISP905Документ16 страницPSEUDOISP905ADRIANA MUNOSОценок пока нет
- Propiedades FenòmenosДокумент8 страницPropiedades FenòmenosBlanco EdithОценок пока нет
- Ejemplo ELV Ajuste de Datos Cloroformo-Metanol Margules PDFДокумент1 страницаEjemplo ELV Ajuste de Datos Cloroformo-Metanol Margules PDFPablo AlejandroОценок пока нет
- Tablas PropiedadesДокумент8 страницTablas PropiedadesDiana Becerra CastroОценок пока нет
- Simulación de crecimiento microbiano y productividad en un biorreactorДокумент2 страницыSimulación de crecimiento microbiano y productividad en un biorreactorMiroku SenshiОценок пока нет
- Transferencia de Calor y Masa. Un Enfoque PrácticoДокумент1 страницаTransferencia de Calor y Masa. Un Enfoque PrácticoKhamilo ArellanoОценок пока нет
- Tablas de PropiedadesДокумент10 страницTablas de PropiedadesPriscila LuceroОценок пока нет
- Informe Corte DirectoДокумент11 страницInforme Corte DirectoKevin MartínezОценок пока нет
- Campo Eléctrico y EquipotencialesДокумент3 страницыCampo Eléctrico y EquipotencialesSüsänRöjäsОценок пока нет
- Laboratorio Cuerpo Rígido OscilacionesДокумент9 страницLaboratorio Cuerpo Rígido OscilacionesSüsänRöjäsОценок пока нет
- Reporte Practica 1Документ4 страницыReporte Practica 1SüsänRöjäsОценок пока нет
- Leyes de KitДокумент3 страницыLeyes de KitSüsänRöjäsОценок пока нет
- RojasBenitez MariaSusanaДокумент2 страницыRojasBenitez MariaSusanaSüsänRöjäsОценок пока нет
- Funciones y Modelos Matematicos en ContextoДокумент23 страницыFunciones y Modelos Matematicos en ContextoSüsänRöjäsОценок пока нет
- MetalesДокумент35 страницMetalesSüsänRöjäsОценок пока нет
- Unidad 2 - Banco de Preguntas-1-1Документ5 страницUnidad 2 - Banco de Preguntas-1-1Karen Montalvan100% (1)
- Bbcs1-6 - La Salvación y Las RecompensasДокумент5 страницBbcs1-6 - La Salvación y Las RecompensasPsa.Mtra. Mirella CoelloОценок пока нет
- Todo para El Aula 2DO CICLO - ABRIL 2019Документ134 страницыTodo para El Aula 2DO CICLO - ABRIL 2019Gloria FloresОценок пока нет
- Libro Los Aburraes PDFДокумент93 страницыLibro Los Aburraes PDFGermán David Vega Arévalo100% (2)
- Cuadro Comparativo Etica y MoralДокумент18 страницCuadro Comparativo Etica y MoralJorge Alberto Vargas CastroОценок пока нет
- Triptico CancerДокумент2 страницыTriptico CancerdenisguilleОценок пока нет
- Grupo 3-Cuestionario1 Al 5Документ19 страницGrupo 3-Cuestionario1 Al 5Josué AcostaОценок пока нет
- CRISPR1Документ4 страницыCRISPR1Jacobo UrbinaОценок пока нет
- Las Resistencias Transferenciales en La Terapia Analítica de Sigmund FreudДокумент17 страницLas Resistencias Transferenciales en La Terapia Analítica de Sigmund FreudjuanpablovildosoОценок пока нет
- Vacunas Inactivas RecombinanteДокумент6 страницVacunas Inactivas RecombinantebypikaОценок пока нет
- Sub Productos Del Beneficio de AnimalesДокумент13 страницSub Productos Del Beneficio de AnimalesAnahí Auqui ArotomaОценок пока нет
- El CarburadorДокумент0 страницEl CarburadorJUANCHURAОценок пока нет
- Pronosticos de InventariosДокумент20 страницPronosticos de Inventarioscrarojas123Оценок пока нет
- Actividad 4 Evidencia 2Документ2 страницыActividad 4 Evidencia 2Zeugirdor Yornom NairdaОценок пока нет
- Avance Proyecto RESIDENCIAДокумент21 страницаAvance Proyecto RESIDENCIAArthur Bustamante ZuritaОценок пока нет
- Spad y EspectrofotometroДокумент8 страницSpad y EspectrofotometroDONALDO RASHID PONCE CARRIZALESОценок пока нет
- Diseño de programa de cosecha para cultivos de estación fríaДокумент3 страницыDiseño de programa de cosecha para cultivos de estación fríaMaicol VizaОценок пока нет
- Desengransante Simple Green - ManttoДокумент2 страницыDesengransante Simple Green - Manttorosalva villarrealОценок пока нет
- Repaso General MedicinaДокумент212 страницRepaso General MedicinaMario ZapataОценок пока нет
- Cambia tu vida con iadДокумент20 страницCambia tu vida con iadPaúl GarcíaОценок пока нет
- TFM Mac DimДокумент61 страницаTFM Mac DimCamilo Acuña CarreñoОценок пока нет
- Vectores Ejercicios PDFДокумент3 страницыVectores Ejercicios PDFBeto YañezОценок пока нет
- Inf. Pruebas Met - Arturo MusirisДокумент3 страницыInf. Pruebas Met - Arturo MusirisJeanpierre TorreblancaОценок пока нет
- 1glaucoma Primario de Ángulo Cerrado (GPAC)Документ22 страницы1glaucoma Primario de Ángulo Cerrado (GPAC)Olga Isabel Pisco ZavaletaОценок пока нет