Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- NET December 2016 Part A: F, On A Moving Ball, Is Proportional To Its VelocityДокумент21 страницаNET December 2016 Part A: F, On A Moving Ball, Is Proportional To Its VelocityRamesh IswaraОценок пока нет
- 1-2 Introduction To Control PDFДокумент10 страниц1-2 Introduction To Control PDFyapacagınız sıteyı s..100% (1)
- Analysis and Design of A Multi Storey Building With Flat Slab (C+G+9) Using ETABSДокумент8 страницAnalysis and Design of A Multi Storey Building With Flat Slab (C+G+9) Using ETABSTurnitin ReportОценок пока нет
- Things To Learn Today: 1. Use Energy Method To Derive Equation of Motion 2. Damping ElementsДокумент15 страницThings To Learn Today: 1. Use Energy Method To Derive Equation of Motion 2. Damping ElementsSayantan GhoshОценок пока нет
- Spring Damping On Matlab PlatformДокумент3 страницыSpring Damping On Matlab PlatformShaharior AnikОценок пока нет
- Optimization of The Damper SettingsДокумент42 страницыOptimization of The Damper SettingsAnderson MoribeОценок пока нет
- Pile Foundations in Engineering Practice by S - by Civildatas - Blogspot.inДокумент784 страницыPile Foundations in Engineering Practice by S - by Civildatas - Blogspot.inTatiana RodríguezОценок пока нет
- Basic Control System 1Документ151 страницаBasic Control System 1ابزار دقیقОценок пока нет
- Assignment 2Документ2 страницыAssignment 2Abhishek ChaurasiyaОценок пока нет
- Mechanical Vibration Solved ExamplesДокумент84 страницыMechanical Vibration Solved ExamplesParas Thakur92% (172)
- AEEM 728 Introduction To Ultrasonics Lecture Notes PDFДокумент147 страницAEEM 728 Introduction To Ultrasonics Lecture Notes PDFEd Gar YundaОценок пока нет
- Lecture On Vibration PDFДокумент298 страницLecture On Vibration PDFAbdul Hamid BhattiОценок пока нет
- Liquid Sloshing in ContainersДокумент192 страницыLiquid Sloshing in Containerstgvnayagam100% (3)
- CH4-Trans Resp PDFДокумент53 страницыCH4-Trans Resp PDFLove StrikeОценок пока нет
- ME8594-Dynamics of MachinesДокумент29 страницME8594-Dynamics of MachinesVinoth KumarОценок пока нет
- Areva Inst TransformersДокумент12 страницAreva Inst TransformersKar ThikОценок пока нет
- Extra Tutorial1b Vibration DampedДокумент3 страницыExtra Tutorial1b Vibration DampedJojnojie DannyzОценок пока нет
- TR 2011 02 PDFДокумент76 страницTR 2011 02 PDFFaris HadiyantoОценок пока нет
- A Guide To Your Dampers Chapter From FSAE Book by Jim Kasprzak UpdatedДокумент26 страницA Guide To Your Dampers Chapter From FSAE Book by Jim Kasprzak UpdatedPRAVEEN KUMARОценок пока нет
- Car Hood v2Документ91 страницаCar Hood v2Filippo L. FerrettiОценок пока нет
- Ballistic GalvanometerLesson 7.2 Basic Parameters Associated With The Ballistic GalvanometerДокумент19 страницBallistic GalvanometerLesson 7.2 Basic Parameters Associated With The Ballistic Galvanometerb.kamalesh shenoyОценок пока нет
- Damping in Structures: Part A: Experimental Data and Recommended Modal Damping RatiosДокумент20 страницDamping in Structures: Part A: Experimental Data and Recommended Modal Damping RatiosMakaraSoyОценок пока нет
- Lab #6 - Second Order Systems Rev 1Документ5 страницLab #6 - Second Order Systems Rev 1ahmed shahОценок пока нет
- MV Viva QuestionsДокумент12 страницMV Viva QuestionsOMKAR KULKARNIОценок пока нет
- Footbridge Guide SetraДокумент131 страницаFootbridge Guide Setraibnmessaoud10100% (1)
- Dynamic Analysis Guide PDFДокумент14 страницDynamic Analysis Guide PDFasifОценок пока нет
- AAE 352 Course Text Weisshaar 2011Документ30 страницAAE 352 Course Text Weisshaar 2011Bhavya AnoohyaОценок пока нет
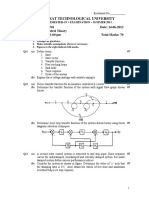
- Control Theory Summer 2013 CTДокумент2 страницыControl Theory Summer 2013 CTvisupinuОценок пока нет
- Control of Tower Cranes With Double-Pendulum Payload DynamicsДокумент14 страницControl of Tower Cranes With Double-Pendulum Payload DynamicsLUIS ALBERTO SALAZAR CHAVEZОценок пока нет
- Chapter 4Документ23 страницыChapter 4Marwa Ismail KamelОценок пока нет