Вам также может понравиться
- Calendario - TCC ECIV 2018.2Документ1 страницаCalendario - TCC ECIV 2018.2Max MillerОценок пока нет
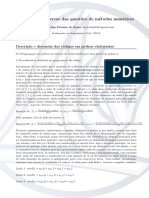
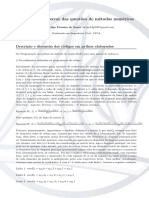
- Resumo C Digos M Todos Num Ricos Bruno FelipeДокумент17 страницResumo C Digos M Todos Num Ricos Bruno FelipeBruno FirminoОценок пока нет
- Guia de Orientações - PLE PDFДокумент34 страницыGuia de Orientações - PLE PDFBruno Felipe Firmino de SouzaОценок пока нет
- 5W2H - Bruno Felipe - MestradoДокумент8 страниц5W2H - Bruno Felipe - MestradoBruno Felipe Firmino de SouzaОценок пока нет
- Exercício Resolvido Bloco de CoroamentoДокумент7 страницExercício Resolvido Bloco de CoroamentoBruno Felipe Firmino de SouzaОценок пока нет
- ListaДокумент2 страницыListaBruno Felipe Firmino de SouzaОценок пока нет
- 12a ExemploДокумент51 страница12a ExemploBruno Felipe Firmino de SouzaОценок пока нет
- Aula 2 e 3 - Surgimento Das Ciencias SociaisДокумент25 страницAula 2 e 3 - Surgimento Das Ciencias SociaisBruno Felipe Firmino de SouzaОценок пока нет
- Aula 2 e 3 - Surgimento Das Ciencias SociaisДокумент25 страницAula 2 e 3 - Surgimento Das Ciencias SociaisBruno Felipe Firmino de SouzaОценок пока нет
- Resumo Programa de Criptografia Bruno Felipe PDFДокумент3 страницыResumo Programa de Criptografia Bruno Felipe PDFBruno Felipe Firmino de SouzaОценок пока нет
- Procedimentos para execução de alvenaria estruturalДокумент4 страницыProcedimentos para execução de alvenaria estruturalBruno Felipe Firmino de Souza100% (3)
- Dimensionamento de sapata retangular para pilar P27Документ1 страницаDimensionamento de sapata retangular para pilar P27Bruno Felipe Firmino de SouzaОценок пока нет
- Projeto - Concreto ProtendidoДокумент19 страницProjeto - Concreto ProtendidoBruno Felipe Firmino de SouzaОценок пока нет
- Resumo C Digos M Todos Num Ricos Bruno FelipeДокумент15 страницResumo C Digos M Todos Num Ricos Bruno FelipeBruno Felipe Firmino de SouzaОценок пока нет
- Resumo Programa de Criptografia Bruno Felipe PDFДокумент3 страницыResumo Programa de Criptografia Bruno Felipe PDFBruno Felipe Firmino de SouzaОценок пока нет
- Resumo C Digos M Todos Num Ricos Bruno FelipeДокумент17 страницResumo C Digos M Todos Num Ricos Bruno FelipeBruno FirminoОценок пока нет
- Manutenção - BFДокумент6 страницManutenção - BFBruno Felipe Firmino de SouzaОценок пока нет
- Cálculo da viga de equilíbrio e estribo vertical para sapata excêntricaДокумент1 страницаCálculo da viga de equilíbrio e estribo vertical para sapata excêntricaBruno Felipe Firmino de SouzaОценок пока нет
- Solução Exemplo 2 FEM Cap3Документ2 страницыSolução Exemplo 2 FEM Cap3Bruno Felipe Firmino de SouzaОценок пока нет
- MEF 01v2Документ8 страницMEF 01v2Bruno Felipe Firmino de SouzaОценок пока нет
- 168 casos reais de fissuração em estruturas de concretoДокумент283 страницы168 casos reais de fissuração em estruturas de concretoviniciussalesОценок пока нет
- Fundações 02Документ15 страницFundações 02Bruno Felipe Firmino de SouzaОценок пока нет
- Consumo Máximo DiárioДокумент1 страницаConsumo Máximo DiárioBruno Felipe Firmino de SouzaОценок пока нет
- AME Arq02 1Документ32 страницыAME Arq02 1Bruno Felipe Firmino de SouzaОценок пока нет
- Cap1 PDFДокумент59 страницCap1 PDFBruno Felipe Firmino de SouzaОценок пока нет
- Estudo de fissuras estruturais e em painéis de vedaçãoДокумент57 страницEstudo de fissuras estruturais e em painéis de vedaçãoBruno Felipe Firmino de SouzaОценок пока нет
- Washington Pirete Da Silva PDFДокумент141 страницаWashington Pirete Da Silva PDFBruno Felipe Firmino de SouzaОценок пока нет
- Relação de Materiais - TodosДокумент1 страницаRelação de Materiais - TodosBruno Felipe Firmino de SouzaОценок пока нет
- Joanes Silvestre Da Cruz Luiz Paniago Neves Difis/DnpmДокумент53 страницыJoanes Silvestre Da Cruz Luiz Paniago Neves Difis/DnpmlucasОценок пока нет
- MGB - Lista 1Документ2 страницыMGB - Lista 1VitorAffonsoОценок пока нет
- A Am 80 A0 A6 CandoaДокумент54 страницыA Am 80 A0 A6 CandoaHailton VieiraОценок пока нет
- Esq EPCUДокумент48 страницEsq EPCURafaelDutil100% (2)
- Avaliação Do Dimensionamento e Da Instalação de Resistor de Aterramento No NeutroДокумент7 страницAvaliação Do Dimensionamento e Da Instalação de Resistor de Aterramento No NeutroRuiVagnerОценок пока нет
- GuiaDidatico - Densidade - Peso, Massa e VolumeДокумент11 страницGuiaDidatico - Densidade - Peso, Massa e VolumeLuísa Helena LОценок пока нет
- Aula Power Point - Equação Do 1º Grau - 7 SérieДокумент3 страницыAula Power Point - Equação Do 1º Grau - 7 SérieMichael LeugimОценок пока нет
- Materiais VolumétricosДокумент3 страницыMateriais VolumétricosLuan Gabriel100% (2)
- Trabalho Sobre Maquinas de Indução TrifásicaДокумент6 страницTrabalho Sobre Maquinas de Indução TrifásicaRubya SouzaОценок пока нет
- Quiz NBR 5410Документ3 страницыQuiz NBR 5410Geoleano PereiraОценок пока нет
- MERCEDES Cx-de-Mudan-G210-211-240 PDFДокумент44 страницыMERCEDES Cx-de-Mudan-G210-211-240 PDFtadeu93% (71)
- Noções de HidráulicaДокумент61 страницаNoções de HidráulicaandreОценок пока нет
- Pocket Dragon: Classes e RaçasДокумент16 страницPocket Dragon: Classes e RaçasGilvan José GouvêaОценок пока нет
- O átomo e a célula como elementos base do Universo e dos seres vivosДокумент10 страницO átomo e a célula como elementos base do Universo e dos seres vivostonywebcam100% (2)
- Generador eléctrico a partir de imanesДокумент3 страницыGenerador eléctrico a partir de imanesspotniОценок пока нет
- NBR 6118 Projeto de estruturas de concretoДокумент9 страницNBR 6118 Projeto de estruturas de concretoNayara Roberta Alves GonzattiОценок пока нет
- Medidor de Vazao Tipo Turbina para Gases - ContechДокумент4 страницыMedidor de Vazao Tipo Turbina para Gases - ContechvitinrjОценок пока нет
- Teste Matemática 7o AnoДокумент3 страницыTeste Matemática 7o AnoAdélia GonçalvesОценок пока нет
- Números complexos e suas aplicaçõesДокумент33 страницыNúmeros complexos e suas aplicaçõesPatty CoelhoОценок пока нет
- Cálculo Integral: Função PrimitivaДокумент43 страницыCálculo Integral: Função PrimitivaFlávio Bernardino de Oliveira JúniorОценок пока нет
- Respostas da Atividade QuímicaДокумент5 страницRespostas da Atividade QuímicaJeronimo MateusОценок пока нет
- Polietileno de Ultra Alto Peso MolecularДокумент46 страницPolietileno de Ultra Alto Peso Molecularpatikavalco100% (1)
- PERMEABILIDADE Trabalho ApresentaçãoДокумент33 страницыPERMEABILIDADE Trabalho ApresentaçãoWagner AlmeidaОценок пока нет
- Apostila Transporte PDFДокумент33 страницыApostila Transporte PDFAndré BrightRevОценок пока нет
- BiomateriaisДокумент39 страницBiomateriaisManasses AgraОценок пока нет
- Revisão Química GeralДокумент53 страницыRevisão Química GeralLuciano MachadoОценок пока нет
- Projeto de uma catraca mecânica para a Universidade Federal da BahiaДокумент13 страницProjeto de uma catraca mecânica para a Universidade Federal da BahiaRafael QueirozОценок пока нет
- Cônicas e Quádricas APSДокумент29 страницCônicas e Quádricas APSRafael CeccattoОценок пока нет
- Como funciona a depilação a laser díodoДокумент3 страницыComo funciona a depilação a laser díodoJosélia MartinsОценок пока нет
- Superfícies Quádricas e de Revolução PDFДокумент12 страницSuperfícies Quádricas e de Revolução PDFwebergdrОценок пока нет