Вам также может понравиться
- Impact and Application of 3D Printing Technology: Key Words: AM, FDM, PLA, ABS, and CADДокумент6 страницImpact and Application of 3D Printing Technology: Key Words: AM, FDM, PLA, ABS, and CADpradeep rocksОценок пока нет
- Rapid Manufacturing Process-3D Printing Technology Advantages, Disadvantages and ApplicationsДокумент3 страницыRapid Manufacturing Process-3D Printing Technology Advantages, Disadvantages and ApplicationsVisvas RajyaguruОценок пока нет
- 3D Printing Research Paper Various Aspects PDFДокумент15 страниц3D Printing Research Paper Various Aspects PDFJames Francis MagdalinoОценок пока нет
- IJRET20160516038Документ4 страницыIJRET20160516038Youssef AliОценок пока нет
- 3D Printing TechnologyДокумент10 страниц3D Printing Technologyngdineshmba100% (1)
- 3D Printing Research Paper - Various Aspects PDFДокумент6 страниц3D Printing Research Paper - Various Aspects PDFhipovemicОценок пока нет
- A Review Paper On 3d Printing Aspects and Various Processes Used in The 3d Printing IJERTV6IS060409 PDFДокумент6 страницA Review Paper On 3d Printing Aspects and Various Processes Used in The 3d Printing IJERTV6IS060409 PDFhipovemicОценок пока нет
- 1 s2.0 S2214785323035393 MainДокумент9 страниц1 s2.0 S2214785323035393 MainTayyab AliОценок пока нет
- Best Engineering JournalsДокумент10 страницBest Engineering JournalsSaritaОценок пока нет
- Design and Fabrication of 3d PrintingДокумент23 страницыDesign and Fabrication of 3d PrintingManikanta Venkata100% (1)
- 3d Printer ReportДокумент18 страниц3d Printer ReportkharvaОценок пока нет
- 3D Printed Face ShieldДокумент8 страниц3D Printed Face ShieldIJRASETPublicationsОценок пока нет
- 3 D Printing Robotic ArmДокумент4 страницы3 D Printing Robotic Armelking gingstarsОценок пока нет
- 3D PrintingДокумент21 страница3D PrintingŞaif Ahąmed Thatsìt100% (1)
- 3-D Printing: ContentДокумент9 страниц3-D Printing: ContentRitik PothareОценок пока нет
- Irjet V7i2660Документ3 страницыIrjet V7i2660vsraju2Оценок пока нет
- JETIR2105498Документ3 страницыJETIR2105498Rakshith Nk KashyapОценок пока нет
- InternshipДокумент16 страницInternshipĀbd DùttОценок пока нет
- "3D Printing: An Emerging Era of Future Printing": Mr. Pravin AhirwarДокумент25 страниц"3D Printing: An Emerging Era of Future Printing": Mr. Pravin AhirwarSudipta NathОценок пока нет
- Mini Project SynopsysДокумент6 страницMini Project SynopsysViraj SukaleОценок пока нет
- Ppt@mech B-@2021Документ19 страницPpt@mech B-@2021SSãï Pãvãñ KümãrОценок пока нет
- Module 3Документ10 страницModule 3Suhas RОценок пока нет
- Design and Implementation of An FDM Based 3D PrinterДокумент5 страницDesign and Implementation of An FDM Based 3D PrinterAyyan MirОценок пока нет
- Seminar Report On 3D PrintingДокумент20 страницSeminar Report On 3D PrintingArchitbhardwaj13Оценок пока нет
- CSE 3D Printing ReportДокумент18 страницCSE 3D Printing ReportAksh RawalОценок пока нет
- Engineering Seminar Topics:: Seminar Paper: 3D Printing TechnologyДокумент6 страницEngineering Seminar Topics:: Seminar Paper: 3D Printing TechnologyAyush SinghalОценок пока нет
- 3D Printing OverviewДокумент4 страницы3D Printing OverviewAziz Ul Hassan MohsanОценок пока нет
- 6 Nagendra Narayan and NeerajaДокумент14 страниц6 Nagendra Narayan and NeerajaNeeraja Desai SinghОценок пока нет
- IJRPR12244Документ7 страницIJRPR12244Sai AnirudhОценок пока нет
- IJERT-A Review Paper On 3D-Printing Aspects and Various Processes Used in The 3D-PrintingДокумент7 страницIJERT-A Review Paper On 3D-Printing Aspects and Various Processes Used in The 3D-PrintingGarapati MurarjiОценок пока нет
- Avances TecnologicosДокумент13 страницAvances TecnologicosSALAZAR VILLEGAS ESTEBAN DAMIANОценок пока нет
- 3D Printing PPT 2 ReviewДокумент17 страниц3D Printing PPT 2 ReviewSSãï Pãvãñ KümãrОценок пока нет
- 3d PrintingДокумент13 страниц3d PrintingE-19-laxmikant reddy100% (1)
- 3D PrinterДокумент16 страниц3D PrinterK.Ramesh Mechanical MIET INSTITUTIONSОценок пока нет
- Module-1 Additive Manufacturing 18 SchemeДокумент47 страницModule-1 Additive Manufacturing 18 SchemeSANTOSH100% (1)
- 3-D Printing: BY:-Abhishek Kumar S.C.E. Sasaram (Bihar) Vi Sem (Mechanical)Документ27 страниц3-D Printing: BY:-Abhishek Kumar S.C.E. Sasaram (Bihar) Vi Sem (Mechanical)Abhishek KumarОценок пока нет
- 1 s2.0 S2666412721000441 MainДокумент10 страниц1 s2.0 S2666412721000441 MainBM20623 Wan Mohamad Danial Bin Wan SyariffudinОценок пока нет
- Anjuman College of Engineering & TechnologyДокумент12 страницAnjuman College of Engineering & TechnologyZaky MuzaffarОценок пока нет
- ARCHAN RAJ 4d-Printing Seminar-ReportДокумент24 страницыARCHAN RAJ 4d-Printing Seminar-ReportArchan rajОценок пока нет
- 3d Printers - NewДокумент6 страниц3d Printers - Newslig storiesОценок пока нет
- Mechatronic System Design Project: A 3D Printer Case Study: November 2015Документ7 страницMechatronic System Design Project: A 3D Printer Case Study: November 2015maitham100Оценок пока нет
- A New Emerging TechnologyДокумент16 страницA New Emerging TechnologyHumanityОценок пока нет
- 3de PrintingДокумент17 страниц3de PrintingNaveen AnanthОценок пока нет
- Abstract (3-d Print)Документ1 страницаAbstract (3-d Print)Srijan UpadhyayОценок пока нет
- A Revolution Called 3D Printing: Prepared By: Ankush, PrashantДокумент46 страницA Revolution Called 3D Printing: Prepared By: Ankush, PrashantNico CarballalОценок пока нет
- Report Assignment 1 - 3D Printing - FINALДокумент10 страницReport Assignment 1 - 3D Printing - FINALAmirAfizJimОценок пока нет
- Design and Development of Cartesian Co-Ordinate Based 3D PrinterДокумент8 страницDesign and Development of Cartesian Co-Ordinate Based 3D PrinterTJPRC PublicationsОценок пока нет
- 3 DPrintingfor Garments Production An Exploratory StudyДокумент5 страниц3 DPrintingfor Garments Production An Exploratory StudyEsraa SabraОценок пока нет
- On 3 D Printing and DronesДокумент72 страницыOn 3 D Printing and DronesDurgesh TripathiОценок пока нет
- Design and Fabrication of Arduino Based Flexible Manufacturing Process On The Desk 3D PrintingДокумент10 страницDesign and Fabrication of Arduino Based Flexible Manufacturing Process On The Desk 3D PrintingIJRASETPublicationsОценок пока нет
- Belayseminarfinal 160707092043Документ7 страницBelayseminarfinal 160707092043Gabriel AursuleseiОценок пока нет
- AComprehensive Studyon 3 DPrinting TechnologyДокумент7 страницAComprehensive Studyon 3 DPrinting TechnologyKaushal PanchalОценок пока нет
- APM Additive Manufacturing FinalДокумент4 страницыAPM Additive Manufacturing FinalAnish KumarОценок пока нет
- Comparison of Camera and Laser Scanner Based 3D Point Cloud: December 2019Документ6 страницComparison of Camera and Laser Scanner Based 3D Point Cloud: December 2019Taha HassanОценок пока нет
- Kamble 2018Документ6 страницKamble 2018Tahmidur FahimОценок пока нет
- Paucellier +whitworth Mechnism1Документ18 страницPaucellier +whitworth Mechnism1Dhanush DhundasiОценок пока нет
- Terminology and Methods: Three-Dimensional Printing or 3D Printing (Also Called Additive Manufacturing) Is Any of VariousДокумент28 страницTerminology and Methods: Three-Dimensional Printing or 3D Printing (Also Called Additive Manufacturing) Is Any of VariousAnaОценок пока нет
- Smart Camera: Revolutionizing Visual Perception with Computer VisionОт EverandSmart Camera: Revolutionizing Visual Perception with Computer VisionОценок пока нет
- DMA Interview QuestionsДокумент7 страницDMA Interview QuestionsMAHESH VОценок пока нет
- 01 Introduction To GtestДокумент15 страниц01 Introduction To GtestMAHESH VОценок пока нет
- DCOM Session 073031Документ15 страницDCOM Session 073031MAHESH VОценок пока нет
- Free RTOSДокумент39 страницFree RTOSMAHESH VОценок пока нет
- COOL and SCOM Connections 074644Документ1 страницаCOOL and SCOM Connections 074644MAHESH VОценок пока нет
- 02 Stubs and MocksДокумент17 страниц02 Stubs and MocksMAHESH VОценок пока нет
- Embedded Systems RoadMapДокумент14 страницEmbedded Systems RoadMapMAHESH VОценок пока нет
- Batch-File TrainingДокумент35 страницBatch-File TrainingMAHESH VОценок пока нет
- ReactodoДокумент3 страницыReactodoMAHESH VОценок пока нет
- Mahesh.V Resume SPACEGRAPHДокумент4 страницыMahesh.V Resume SPACEGRAPHMAHESH VОценок пока нет
- Circular Internship and Seminar - 20200212150059Документ2 страницыCircular Internship and Seminar - 20200212150059MAHESH VОценок пока нет
- Eth AutosarДокумент61 страницаEth AutosarMAHESH VОценок пока нет
- PROJECTДокумент4 страницыPROJECTMAHESH VОценок пока нет
- Functions ExerciseДокумент1 страницаFunctions ExerciseMAHESH VОценок пока нет
- Class Object ExerciseДокумент1 страницаClass Object ExerciseMAHESH VОценок пока нет
- Account Management System: Assignment 4Документ11 страницAccount Management System: Assignment 4MAHESH V0% (1)
- Prime Coding CrackerДокумент90 страницPrime Coding CrackerMAHESH VОценок пока нет
- Static VariablesДокумент1 страницаStatic VariablesMAHESH VОценок пока нет
- Elitmus 2021 Aptitude Questions With Explanation: For More Materials Join Placement Fellas On Telegram (Click Here)Документ8 страницElitmus 2021 Aptitude Questions With Explanation: For More Materials Join Placement Fellas On Telegram (Click Here)MAHESH VОценок пока нет
- SJB Institute of Technology: Department of Electrical & Electronics EngineeringДокумент1 страницаSJB Institute of Technology: Department of Electrical & Electronics EngineeringMAHESH VОценок пока нет
- JD - Global Service DeskДокумент1 страницаJD - Global Service DeskMAHESH VОценок пока нет
- 8sem-Project Review Schedule StudentsДокумент1 страница8sem-Project Review Schedule StudentsMAHESH VОценок пока нет
- SDMДокумент16 страницSDMnandhinidishОценок пока нет
- CostewrthjДокумент89 страницCostewrthjRajat DaliaОценок пока нет
- On AutocadДокумент17 страницOn AutocadNarendra PatelОценок пока нет
- Laser Microfabrication of Conical Microtargets For Laser Driven Particle AccelerationДокумент11 страницLaser Microfabrication of Conical Microtargets For Laser Driven Particle AccelerationfghОценок пока нет
- SSDOДокумент8 страницSSDOjonnys7gОценок пока нет
- HGC Exam Revision Booklet ALL QUESTIONS PDFДокумент141 страницаHGC Exam Revision Booklet ALL QUESTIONS PDFAzrulhizam ShapiIОценок пока нет
- Low-Cost Ku-Band Waveguide Devices Using 3D Printing and Liquid Metal FillingДокумент8 страницLow-Cost Ku-Band Waveguide Devices Using 3D Printing and Liquid Metal FillingAhmed HamoudaОценок пока нет
- Rapid PrototypingДокумент55 страницRapid PrototypingPrashanth SaiОценок пока нет
- MOTUS Open Source 3D Printed Robotic ArmДокумент34 страницыMOTUS Open Source 3D Printed Robotic ArmTF Escritório MGОценок пока нет
- Manual Usuario Impresora 3d Me Creator 2Документ56 страницManual Usuario Impresora 3d Me Creator 2bruxotoloОценок пока нет
- Certified Additive Manufacturing For Aircraft InteriorsДокумент9 страницCertified Additive Manufacturing For Aircraft InteriorsCRISA3000000Оценок пока нет
- World Class ManufacturingДокумент78 страницWorld Class ManufacturingRAJASREE SОценок пока нет
- 3D Slicing Cura InterfaceДокумент4 страницы3D Slicing Cura InterfaceMarcus Enzo LisingОценок пока нет
- 3D Printing Pen PDFДокумент7 страниц3D Printing Pen PDFHàří ŞhàňkåŕОценок пока нет
- Future of FoodДокумент9 страницFuture of FoodAcademic JournalОценок пока нет
- Round Robin Tests in AMДокумент9 страницRound Robin Tests in AMCRISA3000000Оценок пока нет
- A Practical Guide On Normal Mapping For GamesДокумент93 страницыA Practical Guide On Normal Mapping For Gamesatila1985Оценок пока нет
- AR4 Robot ManulДокумент289 страницAR4 Robot ManulMohammad NasutionОценок пока нет
- App 3DPДокумент130 страницApp 3DPvaibhavОценок пока нет
- Deep Shift: Technology Tipping Points and Societal ImpactДокумент44 страницыDeep Shift: Technology Tipping Points and Societal ImpactAVОценок пока нет
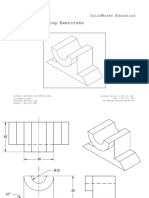
- SolidWorks Education Detailed Drawing ExДокумент51 страницаSolidWorks Education Detailed Drawing ExMarcos José da SilvaОценок пока нет
- Experimental Analysis of Electrical Conductivity of The 3D Printed Graphene2019international Journal of Engineering and Advanced Technology PDFДокумент6 страницExperimental Analysis of Electrical Conductivity of The 3D Printed Graphene2019international Journal of Engineering and Advanced Technology PDFrhusheinОценок пока нет
- Recent Developments in High Temperature Heat Exchangers: A ReviewДокумент14 страницRecent Developments in High Temperature Heat Exchangers: A ReviewdfvgdfvdfvdsvsfsdasdvОценок пока нет
- BuchananandGardner2019 Metal3Dprintinginconstruction AreviewДокумент37 страницBuchananandGardner2019 Metal3Dprintinginconstruction AreviewJoão PraganaОценок пока нет
- Assembly - August 2017Документ84 страницыAssembly - August 2017Varun KumarОценок пока нет
- Mojave 9 Spec SheetДокумент2 страницыMojave 9 Spec SheetAmmoLand Shooting Sports NewsОценок пока нет
- A Comprehensive Literature Review On Auxetic MaterialsДокумент3 страницыA Comprehensive Literature Review On Auxetic MaterialsKrafty GirlОценок пока нет
- The Development of Nature-Inspired Gripping System of A Flat CFRP Strip For Stress-Ribbon Structural LayoutДокумент11 страницThe Development of Nature-Inspired Gripping System of A Flat CFRP Strip For Stress-Ribbon Structural LayoutAleksandrs ArnautovsОценок пока нет
- Problem It AsДокумент379 страницProblem It Asfernando paucarОценок пока нет
- Shintemirov MESA 2014Документ7 страницShintemirov MESA 2014اقْرَأْ وَرَبُّكَ الْأَكْرَمُОценок пока нет