Вам также может понравиться
- ETEG 425 Internal Exam Questions 2021Документ2 страницыETEG 425 Internal Exam Questions 2021subashОценок пока нет
- Large Language ModelДокумент6 страницLarge Language ModelABCОценок пока нет
- Biasing and Transfer Characteristic of Mach-Zehnder Modulator (MZM) 1Документ12 страницBiasing and Transfer Characteristic of Mach-Zehnder Modulator (MZM) 1Ranjan KumarОценок пока нет
- Sampling, Reconstruction, and Elementary Digital Filters: R.C. MaherДокумент21 страницаSampling, Reconstruction, and Elementary Digital Filters: R.C. MaherPVL NARASIMHA RAOОценок пока нет
- L4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Документ15 страницL4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Hunter VerneОценок пока нет
- Fundamentals of Digital Signal ProcessingДокумент26 страницFundamentals of Digital Signal ProcessingNini LashariОценок пока нет
- CMOS Transceiver For Nano-Photonic Links in Data-Centers: Undergraduate Project Solomon Micheal SerunjogiДокумент24 страницыCMOS Transceiver For Nano-Photonic Links in Data-Centers: Undergraduate Project Solomon Micheal SerunjogihimОценок пока нет
- 7-SSB VSBДокумент23 страницы7-SSB VSBLive MCQ ExamОценок пока нет
- 30-PAPR in OFDM-22-Mar-2018 - Reference Material I - OFDM2 PDFДокумент22 страницы30-PAPR in OFDM-22-Mar-2018 - Reference Material I - OFDM2 PDFBharghav RoyОценок пока нет
- Department of Electrical Engineering EE365L: Communication SystemsДокумент15 страницDepartment of Electrical Engineering EE365L: Communication SystemsAbrahan ShahzadОценок пока нет
- SS07 Sampling TheoremДокумент16 страницSS07 Sampling TheoremZhang Shenjia JessicaОценок пока нет
- Appendix A: MOSFET and Logic Gate Parameters (PTM HP Models)Документ26 страницAppendix A: MOSFET and Logic Gate Parameters (PTM HP Models)Anuradha KhalkhoОценок пока нет
- Wireless and Mobile Communications: Abhijit Bhowmick Sense VIT, Vellore, TN, IndiaДокумент38 страницWireless and Mobile Communications: Abhijit Bhowmick Sense VIT, Vellore, TN, IndiaBharghav RoyОценок пока нет
- 2 - Characteristics of An RF System: Additive NoiseДокумент44 страницы2 - Characteristics of An RF System: Additive NoiseDiogoKraußОценок пока нет
- Lecture10 DigitalДокумент53 страницыLecture10 DigitalMaggiОценок пока нет
- Chapter 1-2 Digital Baseband Modulation TechniquesДокумент25 страницChapter 1-2 Digital Baseband Modulation Techniqueslu huangОценок пока нет
- ADC Unit 2Документ16 страницADC Unit 2Satyendra PrasadОценок пока нет
- Lecture 11: LTI FIR Filter Design: Instructor: Dr. Gleb V. Tcheslavski Contact: Office Hours: Class Web SiteДокумент52 страницыLecture 11: LTI FIR Filter Design: Instructor: Dr. Gleb V. Tcheslavski Contact: Office Hours: Class Web SiteFahadKhОценок пока нет
- Module 5 4 AdvMixer PDFДокумент54 страницыModule 5 4 AdvMixer PDFManoj KumarОценок пока нет
- L2: Signals & Spectra: Motivation For Frequency DomainДокумент24 страницыL2: Signals & Spectra: Motivation For Frequency DomainHunter VerneОценок пока нет
- Signals and Systems 08 TL Section II Class Test 2: F X F YДокумент1 страницаSignals and Systems 08 TL Section II Class Test 2: F X F YFaizan MateenОценок пока нет
- Unit 5Документ78 страницUnit 5Pavithra SivanathanОценок пока нет
- Elec3505 Formula SheetДокумент10 страницElec3505 Formula Sheetkavita4123Оценок пока нет
- FALLSEM2023-24 ECE4009 ETH VL2023240102914 2023-09-25 Reference-Material-IДокумент40 страницFALLSEM2023-24 ECE4009 ETH VL2023240102914 2023-09-25 Reference-Material-IPraneshОценок пока нет
- Support 2021 P1Документ11 страницSupport 2021 P1Remi LОценок пока нет
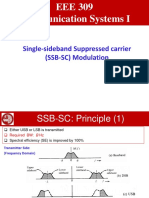
- EEE 309 Communication Systems I: Single-Sideband Suppressed Carrier (SSB-SC) ModulationДокумент21 страницаEEE 309 Communication Systems I: Single-Sideband Suppressed Carrier (SSB-SC) ModulationRaihan AliОценок пока нет
- Wavelet TransformДокумент76 страницWavelet TransformWarrior BroОценок пока нет
- QAB 4083 Seismic Data Processing: Lecture 7c: Wiener Filter For Spiking DeconvolutionДокумент27 страницQAB 4083 Seismic Data Processing: Lecture 7c: Wiener Filter For Spiking DeconvolutionMithunОценок пока нет
- EEE 107 Lecture 8 - Effects of Noise in Analog Modulation TechniquesДокумент29 страницEEE 107 Lecture 8 - Effects of Noise in Analog Modulation Techniques許耕立Оценок пока нет
- Signals and Systems Class 17Документ23 страницыSignals and Systems Class 17wizarderbrОценок пока нет
- Chap1 Jan.23Документ83 страницыChap1 Jan.23yamen.nasser7Оценок пока нет
- From AM Radio To Digital I/Q ModulationДокумент57 страницFrom AM Radio To Digital I/Q Modulationjtz00000Оценок пока нет
- An Improvement of Defected Ground Structure Lowpass/Bandpass Filters Using H-Slot Resonators and Coupling Matrix MethodДокумент13 страницAn Improvement of Defected Ground Structure Lowpass/Bandpass Filters Using H-Slot Resonators and Coupling Matrix MethodEmad AlsurrajОценок пока нет
- Chap4 Lec2Документ16 страницChap4 Lec2Boshra BharОценок пока нет
- SpreadДокумент36 страницSpreadVikrant Sahu0% (1)
- Typical Radio Receivers Commercial AM: Envelope Detection AM PowerДокумент24 страницыTypical Radio Receivers Commercial AM: Envelope Detection AM PowerbalkyderОценок пока нет
- Fourier (2) : Yedi George YL Program Studi Teknik Telekomunikasi Jurusan Teknik Elektro PNUPДокумент19 страницFourier (2) : Yedi George YL Program Studi Teknik Telekomunikasi Jurusan Teknik Elektro PNUPBlacklist XОценок пока нет
- Reciprocity MixersДокумент48 страницReciprocity MixersMax MarkОценок пока нет
- Berlin Direct MethodsДокумент21 страницаBerlin Direct MethodsGobiОценок пока нет
- Part 03-3 EEE309 Amplitude Modulation - SSB - QAM - VSBДокумент23 страницыPart 03-3 EEE309 Amplitude Modulation - SSB - QAM - VSBUma GoОценок пока нет
- Signals and Systems For Signals and Systems ForДокумент106 страницSignals and Systems For Signals and Systems ForGandhi NapitupuluОценок пока нет
- Digital Sound Generation 2Документ46 страницDigital Sound Generation 2Grado ZeroОценок пока нет
- Slide Set Data Converters - Background ElementsДокумент59 страницSlide Set Data Converters - Background Elementsvuaphu100% (1)
- Experiment No. 6: Study of Time Division Multiplexing (TDM)Документ7 страницExperiment No. 6: Study of Time Division Multiplexing (TDM)api-19756875Оценок пока нет
- Modeling The Baseband Output Envelope of A Microwave DetectorДокумент5 страницModeling The Baseband Output Envelope of A Microwave DetectorLiesbethОценок пока нет
- 04 Series de Fourier - 1Документ50 страниц04 Series de Fourier - 1Edu AguirreОценок пока нет
- L18: FM Threshold Effect & Pre /de Emphasis: N S T M P D N SДокумент11 страницL18: FM Threshold Effect & Pre /de Emphasis: N S T M P D N SHunter VerneОценок пока нет
- SP - Lecture - W5 - 2 - ModДокумент20 страницSP - Lecture - W5 - 2 - ModEngkhadega HaresОценок пока нет
- HT9200A/HT9200B DTMF Generators: FeaturesДокумент14 страницHT9200A/HT9200B DTMF Generators: Featuresشادي العمرОценок пока нет
- DSP C5000: Polyphase FIR Filter Implementation For Communication SystemsДокумент28 страницDSP C5000: Polyphase FIR Filter Implementation For Communication SystemsVinodKumarTummalurОценок пока нет
- 04-Line Codes and SpectraДокумент19 страниц04-Line Codes and SpectraJayden AdevaОценок пока нет
- Continuous-Time Fourier Transform: Prof. Adnan KavakДокумент14 страницContinuous-Time Fourier Transform: Prof. Adnan Kavakhobi dunyamОценок пока нет
- Sistemas de ComunicaciónДокумент18 страницSistemas de ComunicaciónDaniel GarcíaОценок пока нет
- Lecture 2 Outline: AnnouncementsДокумент9 страницLecture 2 Outline: AnnouncementsKidalaОценок пока нет
- A Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelДокумент10 страницA Log Periodic Series-Fed Antennas Array Design Using A Simple Transmission Line ModelSugunaОценок пока нет
- Hull OFOD11 e Solutions CH 28Документ7 страницHull OFOD11 e Solutions CH 28Park GeunhyeОценок пока нет
- 05 NG WDM Device CommissioningДокумент58 страниц05 NG WDM Device CommissioningFaris Azhari AbdulfattahОценок пока нет
- UNIT-1: Wireless Propagation Mechanisms, Statistical Multipath Channel Models and Evolution From 1G To 4GДокумент83 страницыUNIT-1: Wireless Propagation Mechanisms, Statistical Multipath Channel Models and Evolution From 1G To 4GManas RakshitОценок пока нет
- A Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelДокумент10 страницA Log Periodic Series Fed Antennas Array Design Using A Simple Transmission Line ModelSubhanjali MyneniОценок пока нет
- Orthogonal Wavelets Via Filter BanksДокумент22 страницыOrthogonal Wavelets Via Filter Banksgabiscar01Оценок пока нет
- ECN 542: Microwave Integrated Circuits Lecture Module #5: Mixer DesignДокумент33 страницыECN 542: Microwave Integrated Circuits Lecture Module #5: Mixer DesignAman SharmaОценок пока нет
- Mes 6 enДокумент2 страницыMes 6 enKoldodeRostovОценок пока нет
- Canali Zac I One SssДокумент10 страницCanali Zac I One SssKoldodeRostovОценок пока нет
- A3 CHF 2018 Passives T Lines 2Документ17 страницA3 CHF 2018 Passives T Lines 2KoldodeRostovОценок пока нет
- Exam 2Документ1 страницаExam 2KoldodeRostovОценок пока нет
- Ads 8509Документ34 страницыAds 8509KoldodeRostovОценок пока нет
- KLДокумент2 страницыKLKoldodeRostovОценок пока нет
- Atmel 8456 8 and 32 Bit Avr Microcontrollers Avr127 Understanding Adc Parameters Application NoteДокумент24 страницыAtmel 8456 8 and 32 Bit Avr Microcontrollers Avr127 Understanding Adc Parameters Application NoteBiswajit SinghОценок пока нет
- KLÑMMMДокумент6 страницKLÑMMMKoldodeRostovОценок пока нет
- A5 Microelectronic Systems 5 Nyquist ADДокумент25 страницA5 Microelectronic Systems 5 Nyquist ADKoldodeRostovОценок пока нет
- KLÑMMMДокумент6 страницKLÑMMMKoldodeRostovОценок пока нет
- Designs of All Digital Phase Locked Loop: A ReviewДокумент5 страницDesigns of All Digital Phase Locked Loop: A ReviewKoldodeRostovОценок пока нет
- Guia MadridДокумент1 страницаGuia MadridKoldodeRostovОценок пока нет
- Designs of All Digital Phase Locked Loop: A ReviewДокумент5 страницDesigns of All Digital Phase Locked Loop: A ReviewKoldodeRostovОценок пока нет
- Ads 8509Документ34 страницыAds 8509KoldodeRostovОценок пока нет
- Laboratory Work Preparation: Lab Work 1: Introduction To MatlabДокумент25 страницLaboratory Work Preparation: Lab Work 1: Introduction To MatlabKoldodeRostovОценок пока нет
- A5 Microelectronic Systems 5 Nyquist ADДокумент25 страницA5 Microelectronic Systems 5 Nyquist ADKoldodeRostovОценок пока нет
- Phase-Locked Techniques-A Survey: (Invited Paper)Документ7 страницPhase-Locked Techniques-A Survey: (Invited Paper)KoldodeRostovОценок пока нет
- 02 A Biomedical - Data.and - DatabasesДокумент50 страниц02 A Biomedical - Data.and - DatabasesKoldodeRostovОценок пока нет
- 2016 Calendar Clementine Creative PDFДокумент12 страниц2016 Calendar Clementine Creative PDFKoldodeRostovОценок пока нет
- Software Engineering GTU SyllabusДокумент3 страницыSoftware Engineering GTU SyllabusKeyur ThakkarОценок пока нет
- Natural Computing: Lecture 13: Particle Swarm OptimisationДокумент22 страницыNatural Computing: Lecture 13: Particle Swarm OptimisationthavaselvanОценок пока нет
- CV Project1Документ11 страницCV Project1Girish KumarОценок пока нет
- Building Blocks For CaseДокумент5 страницBuilding Blocks For CaseSharmistha Mukherjee60% (5)
- As 3575Документ3 страницыAs 3575ziabuttОценок пока нет
- 5 Root Locus DesignnnДокумент5 страниц5 Root Locus Designnnyapacagınız sıteyı s..Оценок пока нет
- Unit - 2 Se (Sybca Sem-3)Документ12 страницUnit - 2 Se (Sybca Sem-3)Jenish GojariyaОценок пока нет
- Best Practices On Agile MetricsДокумент8 страницBest Practices On Agile MetricsRamesh MaduraiОценок пока нет
- Full Text 02Документ45 страницFull Text 02xzcОценок пока нет
- AFPGMI MSc-38-6Документ31 страницаAFPGMI MSc-38-6nouman khanОценок пока нет
- Most Important Topic and Questions (BCS051)Документ3 страницыMost Important Topic and Questions (BCS051)D starОценок пока нет
- Lecture 1 Intro TP Process ControlДокумент42 страницыLecture 1 Intro TP Process Controlara_1909Оценок пока нет
- ECSS Q ST 30 09 (31july2008)Документ31 страницаECSS Q ST 30 09 (31july2008)jsadachiОценок пока нет
- Linear Quadratic Regulator (LQR) ControlДокумент12 страницLinear Quadratic Regulator (LQR) Controlmike236520Оценок пока нет
- Design of Temperature Control System Using Conventional PID and Intelligent Fuzzy Logic ControllerДокумент6 страницDesign of Temperature Control System Using Conventional PID and Intelligent Fuzzy Logic ControllerAnonymous uYbQQWОценок пока нет
- Study On Pid Parameters Tuning Method Based On MatlabSimulinkДокумент4 страницыStudy On Pid Parameters Tuning Method Based On MatlabSimulinkjalilemadiОценок пока нет
- Identifying Enablers For Coordination Across Construction Supply Chain Processes A Systematic Literature ReviewДокумент31 страницаIdentifying Enablers For Coordination Across Construction Supply Chain Processes A Systematic Literature ReviewTrimakis100% (1)
- English To Luganda TranslationДокумент13 страницEnglish To Luganda TranslationKisejjere RashidОценок пока нет
- The V Model 1Документ18 страницThe V Model 1JoshuaThackerОценок пока нет
- Testing: Instructor: Iqra JavedДокумент32 страницыTesting: Instructor: Iqra Javedzagi techОценок пока нет
- UT Dallas Syllabus For Ee4361.001 05s Taught by P Rajasekaran (pkr021000)Документ2 страницыUT Dallas Syllabus For Ee4361.001 05s Taught by P Rajasekaran (pkr021000)UT Dallas Provost's Technology GroupОценок пока нет
- Chapter 12: Information System DevelopmentДокумент28 страницChapter 12: Information System DevelopmentMuhammad Iqbal HanafriОценок пока нет
- H InfinityДокумент15 страницH InfinityvenikiranОценок пока нет
- Loop ShapingДокумент182 страницыLoop Shapingtasos7639Оценок пока нет
- EXP2 NiggaДокумент10 страницEXP2 Niggachamaar h2Оценок пока нет
- Distributed Control Systems (DCS)Документ2 страницыDistributed Control Systems (DCS)Syamkumar Sasidharan25% (4)
- WSTДокумент82 страницыWSTSmita KadianОценок пока нет
- Public Administration Theory and Practice Hoshiar Singh All ChapterДокумент67 страницPublic Administration Theory and Practice Hoshiar Singh All Chapterrobert.wright838100% (5)