Вам также может понравиться
- Evaluación PALLANCATA (Etapa 2)Документ3 страницыEvaluación PALLANCATA (Etapa 2)Pablo Aguilar MartinezОценок пока нет
- ANALISIS de La COMPOSICION DE UNA OBRAДокумент19 страницANALISIS de La COMPOSICION DE UNA OBRAPablo Aguilar MartinezОценок пока нет
- Plan de MantenimientoДокумент2 страницыPlan de MantenimientoPablo Aguilar MartinezОценок пока нет
- El Arte Ha Estado Presente Desde El Inicio de La Humanidad Por Lo Que Se Ha Vuelto en La Fuente Mas Importante de Expresión. AdemasДокумент1 страницаEl Arte Ha Estado Presente Desde El Inicio de La Humanidad Por Lo Que Se Ha Vuelto en La Fuente Mas Importante de Expresión. AdemasPablo Aguilar MartinezОценок пока нет
- Memorias Técnicas de Diseño y Validación (Autoguardado)Документ22 страницыMemorias Técnicas de Diseño y Validación (Autoguardado)Pablo Aguilar MartinezОценок пока нет
- Carta para TrikaДокумент1 страницаCarta para TrikaPablo Aguilar MartinezОценок пока нет
- PartДокумент47 страницPartPablo Aguilar MartinezОценок пока нет
- Mantenimiento motores eléctricos checklistДокумент2 страницыMantenimiento motores eléctricos checklistPablo Aguilar Martinez100% (1)
- MecatronicaДокумент30 страницMecatronicaPablo Aguilar MartinezОценок пока нет
- Memorias Técnicas de Diseño y ValidaciónДокумент4 страницыMemorias Técnicas de Diseño y ValidaciónPablo Aguilar MartinezОценок пока нет
- Articulo Par El ItpДокумент1 страницаArticulo Par El ItpPablo Aguilar MartinezОценок пока нет
- Especificaciones de Laptops PDFДокумент13 страницEspecificaciones de Laptops PDFPablo Aguilar MartinezОценок пока нет
- Memorias TécnicasДокумент14 страницMemorias TécnicasPablo Aguilar MartinezОценок пока нет
- Informe 1 Expediente Con Los Resultados de Las Pruebas de Validación Del Secador (Autoguardado)Документ45 страницInforme 1 Expediente Con Los Resultados de Las Pruebas de Validación Del Secador (Autoguardado)Pablo Aguilar MartinezОценок пока нет
- Memorias TécnicasДокумент14 страницMemorias TécnicasPablo Aguilar MartinezОценок пока нет
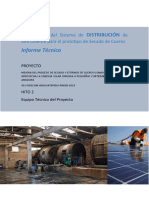
- Informe Técnico: Construcción Del Sistema de de Aire Caliente para El Prototipo de Secado de CuerosДокумент25 страницInforme Técnico: Construcción Del Sistema de de Aire Caliente para El Prototipo de Secado de CuerosPablo Aguilar MartinezОценок пока нет
- DocumentoДокумент1 страницаDocumentoPablo Aguilar MartinezОценок пока нет
- DocumentoДокумент1 страницаDocumentoPablo Aguilar MartinezОценок пока нет
- Modelo de Resolución de TrasladoДокумент2 страницыModelo de Resolución de TrasladoPablo Aguilar MartinezОценок пока нет
- Informe 1 Expediente Con Los Resultados de Las Pruebas de Validación Del Secador (Autoguardado)Документ45 страницInforme 1 Expediente Con Los Resultados de Las Pruebas de Validación Del Secador (Autoguardado)Pablo Aguilar MartinezОценок пока нет
- DocumentoДокумент1 страницаDocumentoPablo Aguilar MartinezОценок пока нет
- Memorias Técnicas de Diseño y Validación (Autoguardado)Документ22 страницыMemorias Técnicas de Diseño y Validación (Autoguardado)Pablo Aguilar MartinezОценок пока нет
- MecatronicaДокумент30 страницMecatronicaPablo Aguilar MartinezОценок пока нет
- Especificaciones de Laptops PDFДокумент13 страницEspecificaciones de Laptops PDFPablo Aguilar MartinezОценок пока нет
- Articulo Par El ItpДокумент1 страницаArticulo Par El ItpPablo Aguilar MartinezОценок пока нет
- Calculos de Intercambiador de CalorДокумент2 страницыCalculos de Intercambiador de CalorPablo Aguilar MartinezОценок пока нет
- Yo Aprendo en Casa 21-04-20Документ3 страницыYo Aprendo en Casa 21-04-20Pablo Aguilar MartinezОценок пока нет
- 02 - Procedimientos de Titulación (Jul2019)Документ17 страниц02 - Procedimientos de Titulación (Jul2019)angelОценок пока нет
- Informe 1 Expediente de Construcción Del Sistema de Generación de Aire Caliente Utilizando Energía Solar para El Secado y Estirado de CueroДокумент21 страницаInforme 1 Expediente de Construcción Del Sistema de Generación de Aire Caliente Utilizando Energía Solar para El Secado y Estirado de CueroPablo Aguilar MartinezОценок пока нет
- Libro de Trigonometria de Preparatoria Preuniversitaria PDFДокумент110 страницLibro de Trigonometria de Preparatoria Preuniversitaria PDFJeremías Daniel Altamirano Castro100% (2)
- PPM - PWMДокумент3 страницыPPM - PWMChavi PesantezОценок пока нет
- 7 1 6 1 10 20170814 PDFДокумент4 страницы7 1 6 1 10 20170814 PDFMonserrat CoronaОценок пока нет
- Motores Electricos U3S11Документ49 страницMotores Electricos U3S11Bladimir Sandoval ServaОценок пока нет
- Electrónica Analógica y DigitalДокумент7 страницElectrónica Analógica y Digitaldaniel.rodriguez2Оценок пока нет
- Cómo controlar un servo usando GRBL y generar código G para la calibraciónДокумент32 страницыCómo controlar un servo usando GRBL y generar código G para la calibraciónmimurar28100% (1)
- Semana 5 - Refuerzo de Tarea de Diagnostico - Servomecanismo y Robotica - 3aДокумент4 страницыSemana 5 - Refuerzo de Tarea de Diagnostico - Servomecanismo y Robotica - 3aGionella Rodriguez AlarconОценок пока нет
- Brazo Robotico Labview+ArduinoДокумент16 страницBrazo Robotico Labview+ArduinoGio Rmz100% (5)
- Informe Prototipo Brazo RoboticoДокумент23 страницыInforme Prototipo Brazo RoboticoKelly GomezxdedОценок пока нет
- Laboratorio 15 - Uso de Librerías en Arduino para Salida de Datos.0Документ15 страницLaboratorio 15 - Uso de Librerías en Arduino para Salida de Datos.0yonyОценок пока нет
- Modelo de motor DC usando diagrama de bloquesДокумент20 страницModelo de motor DC usando diagrama de bloqueshectorОценок пока нет
- Librería para El Control de ServomotoresДокумент7 страницLibrería para El Control de ServomotoresAdelaidoОценок пока нет
- Introducción Arduino y PrácticasДокумент11 страницIntroducción Arduino y PrácticasJorge ArevalosОценок пока нет
- ServomotorДокумент1 страницаServomotorVanessa MendozaОценок пока нет
- S04 - Actuadores Electricos PDFДокумент42 страницыS04 - Actuadores Electricos PDFVictor Alvarado100% (3)
- Motores EspecialesДокумент10 страницMotores EspecialesLuis Ángel Ramirez NavaОценок пока нет
- Que Es Un ServomotorДокумент10 страницQue Es Un ServomotorJoel CordovaОценок пока нет
- Proyecto FinalДокумент14 страницProyecto FinalAlan David Rojo HernandezОценок пока нет
- Reporte de ServomotoresДокумент7 страницReporte de ServomotoresRubens GarciaОценок пока нет
- LAB2 Parametrizacion Basica ABBДокумент8 страницLAB2 Parametrizacion Basica ABBRichard Chalco LipaОценок пока нет
- Tesis FinalДокумент97 страницTesis FinalSantiago Felipe AguirreОценок пока нет
- Control de MovimientoДокумент4 страницыControl de MovimientoharangoeОценок пока нет
- Brazo robótico controlado por servomotoresДокумент5 страницBrazo robótico controlado por servomotoresUlises MirelesОценок пока нет
- SERVOMOTORESДокумент6 страницSERVOMOTORESFelix OjedaОценок пока нет
- Marco Teorico y Aplicaciones Del ProyectoДокумент48 страницMarco Teorico y Aplicaciones Del Proyectogabriel chunga yucraОценок пока нет
- Orlando Ramirez-Tipo de MotoresДокумент14 страницOrlando Ramirez-Tipo de MotoresOrlando RamirezОценок пока нет
- Manual Imagina-Scratch2 3dbot v2.1 Rev3.0 EspДокумент47 страницManual Imagina-Scratch2 3dbot v2.1 Rev3.0 EspJulio RayuelaОценок пока нет
- Curso ServosДокумент153 страницыCurso Servosanne smithОценок пока нет
- AnemometroДокумент2 страницыAnemometroCesar LumeОценок пока нет
- Manual TécnicoДокумент10 страницManual TécnicoJordi A. R.Оценок пока нет
- TFG UbuДокумент117 страницTFG UbuLucasОценок пока нет