Вам также может понравиться
- Manual PDFДокумент200 страницManual PDFEddie grassgunter100% (1)
- Macaulays Method For A Timoshenko Beam PDFДокумент9 страницMacaulays Method For A Timoshenko Beam PDFPablo RicoОценок пока нет
- Format For Summer Internship ReportДокумент2 страницыFormat For Summer Internship Reportmanju47788% (24)
- Drag of A Disk Rotating in A Viscous FluidДокумент50 страницDrag of A Disk Rotating in A Viscous FluidBaptiste RéaudОценок пока нет
- Chen-Li2013 Article Size-dependentFreeVibrationAnaДокумент15 страницChen-Li2013 Article Size-dependentFreeVibrationAnaSilas Sverre ChristensenОценок пока нет
- Final Report FluttterДокумент17 страницFinal Report FluttterMohamed KhairyОценок пока нет
- An Analysis On Quantum Mechanical Stability of Regular Polygons On A Point Base Using Heisenberg Uncertainty PrincipleДокумент8 страницAn Analysis On Quantum Mechanical Stability of Regular Polygons On A Point Base Using Heisenberg Uncertainty PrincipleIJRASETPublicationsОценок пока нет
- Modeling of Large Deformations of Hyperelastic MaterialsДокумент4 страницыModeling of Large Deformations of Hyperelastic MaterialsSEP-PublisherОценок пока нет
- Band StructureДокумент9 страницBand StructurelolaОценок пока нет
- Linear Non Linear FEMДокумент24 страницыLinear Non Linear FEMwial8295Оценок пока нет
- Determination of The Critical Buckling Loads of Euler Columns Using Stodola-Vianello Iteration MethodДокумент18 страницDetermination of The Critical Buckling Loads of Euler Columns Using Stodola-Vianello Iteration MethodMEER MUSTAFA ALIОценок пока нет
- Classical Electrodynamics - A Tutorial On Its FoundationsДокумент21 страницаClassical Electrodynamics - A Tutorial On Its FoundationsPCB SEJ MACEОценок пока нет
- Alain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsДокумент20 страницAlain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDopameОценок пока нет
- A Critical Study of Howell Theory: Et Al.'s Nonlinear BeamДокумент11 страницA Critical Study of Howell Theory: Et Al.'s Nonlinear BeamAsimov RiyazОценок пока нет
- 1 s2.0 0022460X83904431 Main PDFДокумент27 страниц1 s2.0 0022460X83904431 Main PDFLeonardo Calheiros RodriguesОценок пока нет
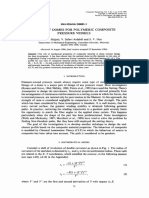
- Design of Domes For Polymeric Composite Pressure Vessels-Hojjati1995Документ9 страницDesign of Domes For Polymeric Composite Pressure Vessels-Hojjati1995Hiến Đinh VănОценок пока нет
- Bianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityДокумент8 страницBianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityManuel RodriguesОценок пока нет
- Smart Materials and Structures: International WorkshopДокумент10 страницSmart Materials and Structures: International WorkshopPartha SarathiiОценок пока нет
- Mean-Field View On Rotating Magnetoconvection and A Geodynamo ModelДокумент5 страницMean-Field View On Rotating Magnetoconvection and A Geodynamo ModelRavindra CharyОценок пока нет
- Modal Analysis Odf CFRP PanelДокумент21 страницаModal Analysis Odf CFRP Paneldimos dimouОценок пока нет
- Transient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryДокумент11 страницTransient Dynamics of Laminated Beams, An Evaluation With A Higher-Order Refined TheoryFAIZОценок пока нет
- The Paradox of Fourier Heat EquationДокумент7 страницThe Paradox of Fourier Heat EquationAngélica RuizОценок пока нет
- Torsion Pendulum InternationalДокумент10 страницTorsion Pendulum InternationalJason LeeОценок пока нет
- Finite Deformation Continuum Model For Single-Walled Carbon NanotubesДокумент9 страницFinite Deformation Continuum Model For Single-Walled Carbon NanotubesEduardo GarciaОценок пока нет
- Sound WavesДокумент19 страницSound WavesbenyfirstОценок пока нет
- Nonlocal DefectionДокумент8 страницNonlocal DefectionWintoloОценок пока нет
- Effect of Micro Inertia in The Propagation of Waves in - 2017 - Applied MathematДокумент11 страницEffect of Micro Inertia in The Propagation of Waves in - 2017 - Applied MathematjuneedyawarОценок пока нет
- A Beam Theory For Anisotropic MaterialsДокумент7 страницA Beam Theory For Anisotropic MaterialsSandip PatelОценок пока нет
- Haken 1975Документ2 страницыHaken 1975cesar abraham torrico chavezОценок пока нет
- Moulton Catenoid in E-Field Revised2Документ20 страницMoulton Catenoid in E-Field Revised2HARDIKОценок пока нет
- Lecture 5 - Deflection DIMДокумент51 страницаLecture 5 - Deflection DIMRod VincentОценок пока нет
- A Note On Generalized Electrodynamics: Electronic Journal of Theoretical Physics January 2011Документ18 страницA Note On Generalized Electrodynamics: Electronic Journal of Theoretical Physics January 2011Toon PillaertОценок пока нет
- On Two Micromechanics Theories For Determining Micro Macro Relations in Heterogeneous SolidsДокумент16 страницOn Two Micromechanics Theories For Determining Micro Macro Relations in Heterogeneous Solidsdavibarbosa91Оценок пока нет
- Physica B: Keyin Li, Kangxian Guo, Litao LiangДокумент5 страницPhysica B: Keyin Li, Kangxian Guo, Litao LiangMohamed JaawaneОценок пока нет
- Flexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyДокумент10 страницFlexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyAkshat RastogiОценок пока нет
- Rayleigh Scattering of Light in Glasses: E. E. A. M. Yu. F. A. V. SДокумент8 страницRayleigh Scattering of Light in Glasses: E. E. A. M. Yu. F. A. V. SOrhan VeliОценок пока нет
- Validation of Analytical Damping Ratio by Fatigue Stress LimitДокумент8 страницValidation of Analytical Damping Ratio by Fatigue Stress LimitTalles OliveiraОценок пока нет
- 1959 Cowley3Документ8 страниц1959 Cowley3Marly Martinez CaballeroОценок пока нет
- A Curved Finite Element For Thin ElasticДокумент38 страницA Curved Finite Element For Thin ElasticJosé Cléber Rodrigues da SilvaОценок пока нет
- Differential Operator Technique in The Ising Spin Systems: Review ArticleДокумент36 страницDifferential Operator Technique in The Ising Spin Systems: Review ArticleNyiam HlubОценок пока нет
- Preliminary Analysis of The Scaling Exponents in Channel Ow TurbulenceДокумент9 страницPreliminary Analysis of The Scaling Exponents in Channel Ow TurbulencechrissbansОценок пока нет
- John B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsДокумент13 страницJohn B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsPlamcfeОценок пока нет
- Modelo de IsingДокумент27 страницModelo de IsingidalmirОценок пока нет
- 2016 Fernandes Etal CONEMДокумент10 страниц2016 Fernandes Etal CONEMStudent ForeignОценок пока нет
- 2016 Fernandes Etal CONEM PDFДокумент10 страниц2016 Fernandes Etal CONEM PDFStudent ForeignОценок пока нет
- The Interpretation of The Shear Locking IN Beam ElementsДокумент8 страницThe Interpretation of The Shear Locking IN Beam ElementsankurОценок пока нет
- Idges PDFДокумент14 страницIdges PDFBarış ÖzcanОценок пока нет
- Raedt Pra 2012 SlitДокумент7 страницRaedt Pra 2012 SlitJamesQuachОценок пока нет
- 2008 MOVIC DohnalMaceДокумент11 страниц2008 MOVIC DohnalMaceChiara GastaldiОценок пока нет
- Surface Plasmon Resonance SPR Theory TutorialДокумент34 страницыSurface Plasmon Resonance SPR Theory TutorialKumar AvinashОценок пока нет
- Goos-Hanchen Shift For Higher-Order Hermite-GaussiДокумент11 страницGoos-Hanchen Shift For Higher-Order Hermite-Gaussikarima.mihoubiОценок пока нет
- SCI.1. Optical Modeling of Hasimoto Map For Antiferromagnetic TimelikeДокумент8 страницSCI.1. Optical Modeling of Hasimoto Map For Antiferromagnetic TimelikeAhmet SAZAKОценок пока нет
- The Bending of Beams and The Second Moment of Area: Chris Bailey, Tim Bull and Aaron LawrenceДокумент12 страницThe Bending of Beams and The Second Moment of Area: Chris Bailey, Tim Bull and Aaron LawrenceNitin shepurОценок пока нет
- A D-Brane Inspired Trinification Model. G. K. Leontaris and J. RizosДокумент12 страницA D-Brane Inspired Trinification Model. G. K. Leontaris and J. RizosColmain NassiriОценок пока нет
- Vibration Energy Harvesting Using Single and Comb-Shaped Piezoelectric Beam Structures: Modeling and SimulationДокумент7 страницVibration Energy Harvesting Using Single and Comb-Shaped Piezoelectric Beam Structures: Modeling and SimulationAmir JoonОценок пока нет
- Mathematics 02 00172Документ24 страницыMathematics 02 00172Far AwayОценок пока нет
- Group Theory: Physics Department, Drexel University, Philadelphia, Pennsylvania 19104, USAДокумент30 страницGroup Theory: Physics Department, Drexel University, Philadelphia, Pennsylvania 19104, USAMatejaBoskovic100% (1)
- No Standard OctavioДокумент8 страницNo Standard OctavioInst Robert Díaz RiemannОценок пока нет
- Timo ShinkoДокумент13 страницTimo ShinkoayantuОценок пока нет
- Noncommutative Geometry and Matrix Theory: Compactification On ToriДокумент42 страницыNoncommutative Geometry and Matrix Theory: Compactification On TorimlmilleratmitОценок пока нет
- Free Vibrations of Stepped Nano-BeamsДокумент10 страницFree Vibrations of Stepped Nano-BeamsNguyễn Sơn LâmОценок пока нет
- Blow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)От EverandBlow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)Оценок пока нет
- Maulana Azad National Institute of Technology, BhopalДокумент1 страницаMaulana Azad National Institute of Technology, BhopalpdhurveyОценок пока нет
- Indian Institute of Technology Indore: Call For Proposals For Technology Innovation Hub (Drishti-Cps)Документ3 страницыIndian Institute of Technology Indore: Call For Proposals For Technology Innovation Hub (Drishti-Cps)pdhurveyОценок пока нет
- 10 1 1 1024 3373Документ12 страниц10 1 1 1024 3373pdhurveyОценок пока нет
- 10 Causes For Low Strength in ConcreteДокумент17 страниц10 Causes For Low Strength in ConcreteTatineni RaviОценок пока нет
- RCivil PG P Adm ListДокумент7 страницRCivil PG P Adm ListpdhurveyОценок пока нет
- Faculty Slots Arch Deptt TIME TABLE JULY-DEC2021Документ4 страницыFaculty Slots Arch Deptt TIME TABLE JULY-DEC2021pdhurveyОценок пока нет
- 164 PDFДокумент6 страниц164 PDFpdhurveyОценок пока нет
- Mos - Lab ManualДокумент80 страницMos - Lab ManualDr. Ashok Kr DargarОценок пока нет
- UDC (12pt Italic, Centered, Spacing Before 6 PT, Spacing After 30 PT, Keep With Next)Документ4 страницыUDC (12pt Italic, Centered, Spacing Before 6 PT, Spacing After 30 PT, Keep With Next)pdhurveyОценок пока нет
- Springer TemplateДокумент8 страницSpringer TemplateAnonymous xAjD4l6Оценок пока нет
- AI Concrete StrengthДокумент8 страницAI Concrete StrengthpdhurveyОценок пока нет
- Springer TemplateДокумент8 страницSpringer TemplateAnonymous xAjD4l6Оценок пока нет
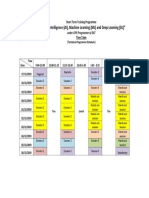
- Artificial Intelligence (AI), Machine Learning (ML) and Deep Learning (DL)Документ1 страницаArtificial Intelligence (AI), Machine Learning (ML) and Deep Learning (DL)pdhurveyОценок пока нет
- Bridge DesignДокумент12 страницBridge DesignpdhurveyОценок пока нет
- Investigation of Blade Performance of Horizontal Axis Wind Turbine Based On Blade Element Momentum Theory (BEMT) Using NACA AirfoilsДокумент12 страницInvestigation of Blade Performance of Horizontal Axis Wind Turbine Based On Blade Element Momentum Theory (BEMT) Using NACA AirfoilspdhurveyОценок пока нет
- Dynamic Instability Analysis of Rotating Delaminated Tapered Composite Plates Subjected To Periodic In-Plane LoadingДокумент5 страницDynamic Instability Analysis of Rotating Delaminated Tapered Composite Plates Subjected To Periodic In-Plane LoadingpdhurveyОценок пока нет
- Template (A)Документ3 страницыTemplate (A)sushilkumarОценок пока нет
- Sustainability 11 01081Документ17 страницSustainability 11 01081pdhurveyОценок пока нет
- Review On The Usage of Ceramic Wastes in Concrete ProductionДокумент7 страницReview On The Usage of Ceramic Wastes in Concrete ProductionpdhurveyОценок пока нет
- Intzetankdesign 170211222454Документ43 страницыIntzetankdesign 170211222454Vishwanath KrОценок пока нет
- Intze Water Tank Based On K. RajuДокумент49 страницIntze Water Tank Based On K. RajuRamachandra SahuОценок пока нет
- Design-Rcc Over Head TankДокумент82 страницыDesign-Rcc Over Head Tankjay_p_shah60% (5)
- Exam List C CertificateДокумент1 страницаExam List C CertificatepdhurveyОценок пока нет
- CardsДокумент2 страницыCardspdhurveyОценок пока нет
- Guide For Authors: Materials Today: ProceedingsДокумент3 страницыGuide For Authors: Materials Today: ProceedingspdhurveyОценок пока нет
- Postbuckling Analysis of Symmetrically Laminated Composite PlateДокумент1 страницаPostbuckling Analysis of Symmetrically Laminated Composite PlatepdhurveyОценок пока нет
- NCC Items HandoverДокумент1 страницаNCC Items HandoverpdhurveyОценок пока нет
- Matter and Consciousness - Iain McGilcristДокумент34 страницыMatter and Consciousness - Iain McGilcristmalcrowe100% (1)
- CHE317 Intro LectureДокумент32 страницыCHE317 Intro LectureKevin MulkernОценок пока нет
- Fundamentals of Deformable BodiesДокумент73 страницыFundamentals of Deformable Bodiesacurvz2005Оценок пока нет
- LMI Series G Metering Pump Datasheet PDFДокумент6 страницLMI Series G Metering Pump Datasheet PDFVkita MolinaОценок пока нет
- INV - 2229 Failure of Exciter Gearbox (DF601V) of Sinter Screens at SP4 - 124048Документ25 страницINV - 2229 Failure of Exciter Gearbox (DF601V) of Sinter Screens at SP4 - 124048ghanshyam chandrakarОценок пока нет
- Settlement Analysis of SoilsДокумент22 страницыSettlement Analysis of SoilsMuhammad Hasham100% (1)
- AxaxxДокумент19 страницAxaxxkara_25Оценок пока нет
- (0000-A) Signals and Systems Using MATLAB An Effective Application For Exploring and Teaching Media Signal ProcessingДокумент5 страниц(0000-A) Signals and Systems Using MATLAB An Effective Application For Exploring and Teaching Media Signal ProcessingAnonymous WkbmWCa8MОценок пока нет
- Eh tw480Документ12 страницEh tw480fefotroncitoОценок пока нет
- Whole Numbers and Basic OperationsДокумент6 страницWhole Numbers and Basic Operationsapi-389461198Оценок пока нет
- Corresponds To The Correct Answer. Write You Answers On The Space Before Each NumberДокумент2 страницыCorresponds To The Correct Answer. Write You Answers On The Space Before Each NumberJESSA SUMAYANGОценок пока нет
- Dew PointДокумент1 страницаDew PointSaeed Ahmed Shaikh100% (2)
- Board Question Paper: July 2019: PhysicsДокумент3 страницыBoard Question Paper: July 2019: PhysicsMahendra ShahОценок пока нет
- 2021 PHYS F3 T1 Exam1 NohighlightДокумент17 страниц2021 PHYS F3 T1 Exam1 NohighlightElsaaaОценок пока нет
- Metal FormingДокумент13 страницMetal Formingabdsu75Оценок пока нет
- Low Stress Mechanical Properties of Woven Silk Fabrics (Part-1)Документ6 страницLow Stress Mechanical Properties of Woven Silk Fabrics (Part-1)Mohammed Atiqul Hoque ChowdhuryОценок пока нет
- 121 B.P.S. XII - Physics Chapter Notes 2014 15 PDFДокумент87 страниц121 B.P.S. XII - Physics Chapter Notes 2014 15 PDFkumarnpccОценок пока нет
- 7636 PDFДокумент7 страниц7636 PDFGerryОценок пока нет
- Instructions HMG 47-48Документ2 страницыInstructions HMG 47-48arindamdhar2004Оценок пока нет
- Finisher q1 q3 PMДокумент62 страницыFinisher q1 q3 PMutilscОценок пока нет
- 1 s2.0 S2352484722007922 MainДокумент21 страница1 s2.0 S2352484722007922 MainEspinoza Payano Blas RussОценок пока нет
- U (1) 'S and Charge: Department of Physics, University of Toronto, Toronto, Ontario, Canada M5S IA 7Документ3 страницыU (1) 'S and Charge: Department of Physics, University of Toronto, Toronto, Ontario, Canada M5S IA 7Catrina MatasarОценок пока нет
- E6 SAS 14 Example Sheet 2 SolutionsДокумент8 страницE6 SAS 14 Example Sheet 2 Solutionstamucha.fx.derivОценок пока нет
- BillDipenser NCR 5633Документ166 страницBillDipenser NCR 5633Amanda Brown100% (1)
- Johor-Answer P2-Trial SPM 2007Документ8 страницJohor-Answer P2-Trial SPM 2007kamalharmozaОценок пока нет
- 207.OTN 260SCX2 and 130SCX10 Cards V1 04 11feb16Документ24 страницы207.OTN 260SCX2 and 130SCX10 Cards V1 04 11feb16Ronald N Meza C100% (1)
- 2011121503-3-Wannate 8221enДокумент2 страницы2011121503-3-Wannate 8221en8612106535Оценок пока нет
- InggrissinkholeДокумент2 страницыInggrissinkholeRika Rika SilvianaОценок пока нет