Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- TN73-2 Electromagnetic Disturbance Troubleshooting HelpДокумент6 страницTN73-2 Electromagnetic Disturbance Troubleshooting HelpCharls GuevaraОценок пока нет
- Manual Mircom FA-1000 Manual PDFДокумент72 страницыManual Mircom FA-1000 Manual PDFwerusso30Оценок пока нет
- DURApulse VFD gs20mДокумент650 страницDURApulse VFD gs20mJim EngineeringОценок пока нет
- Cmos 3Документ26 страницCmos 3nandanvrОценок пока нет
- L15P200AK Spec SheetДокумент2 страницыL15P200AK Spec SheetLucas LucasОценок пока нет
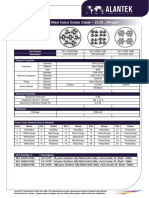
- Outdoor Gel-Filled Cat3 2550100pair UTP v2.1Документ1 страницаOutdoor Gel-Filled Cat3 2550100pair UTP v2.1BinhОценок пока нет
- MTДокумент14 страницMTHernanJHSОценок пока нет
- Wiring Device Second Fix Installation &wiring Termination Rev01Документ7 страницWiring Device Second Fix Installation &wiring Termination Rev01Mohammed Mujeeb Ali FathaanОценок пока нет
- Manual - CRATE, BassAmp PDFДокумент8 страницManual - CRATE, BassAmp PDFwiseeapОценок пока нет
- Uset 18 Physical Science PaperДокумент16 страницUset 18 Physical Science PaperAayushi VermaОценок пока нет
- Cherry, Hooper - Amplifying Devices and Low-Pass Amplifier Design (1968) - RR - TextДокумент1 070 страницCherry, Hooper - Amplifying Devices and Low-Pass Amplifier Design (1968) - RR - TextvjmayrОценок пока нет
- Voltage Transformer National GridДокумент5 страницVoltage Transformer National GridBruce CoxОценок пока нет
- 6.1. Circuit ManipulationsДокумент11 страниц6.1. Circuit ManipulationsZia AteeqОценок пока нет
- Analog Communications Lab Manual - AsraoДокумент128 страницAnalog Communications Lab Manual - AsraoAllanki Sanyasi RaoОценок пока нет
- Datasheet UBECДокумент1 страницаDatasheet UBECjajang_elektro_untirtaОценок пока нет
- CPC 100 User ManualДокумент65 страницCPC 100 User ManualMuhammad Talha100% (2)
- Ece 2003Документ61 страницаEce 2003ghanakrishna100% (2)
- A Reaserch Paper On Solar SystemДокумент6 страницA Reaserch Paper On Solar Systemkhan hadidОценок пока нет
- Yaesu FT-680R Instruction ManualДокумент50 страницYaesu FT-680R Instruction ManualYayok S. AnggoroОценок пока нет
- IEEE Standard For Transient Overvoltage Protection of DC Electrification Systems by Application of DC Surge ArrestersДокумент15 страницIEEE Standard For Transient Overvoltage Protection of DC Electrification Systems by Application of DC Surge ArrestersAbhijeet Kumar SinghОценок пока нет
- Designing Magnetic Components For HF DC-DC ConvertersДокумент456 страницDesigning Magnetic Components For HF DC-DC ConvertersBookard100% (1)
- Sensor and TransducerДокумент15 страницSensor and Transducerrashmi patil100% (1)
- Wireless World 1962 06Документ58 страницWireless World 1962 06Jan PranОценок пока нет
- Dynamometer, Analysis of DynamometerДокумент10 страницDynamometer, Analysis of DynamometerGullible soulОценок пока нет
- 2019 Summer Model Answer Paper (Msbte Study Resources)Документ25 страниц2019 Summer Model Answer Paper (Msbte Study Resources)samarthenterprises122Оценок пока нет
- LG Flatron E700SHДокумент2 страницыLG Flatron E700SHjayakarwОценок пока нет
- Study of Microwave ComponentsДокумент4 страницыStudy of Microwave ComponentsThomas JosephОценок пока нет
- Xtr116 (IC T o 4 - 20ma)Документ17 страницXtr116 (IC T o 4 - 20ma)IEA.BOD.I2 - Sơn, Vũ Văn - Giám đốc E&A - INTECH GROUPОценок пока нет
- Chapter 4 Differential ProtectionДокумент27 страницChapter 4 Differential ProtectionJames100% (1)
- RC CircuitsДокумент4 страницыRC Circuitsjack daniels0% (1)