Вам также может понравиться
- Planificacion de Una SolucionДокумент5 страницPlanificacion de Una SoluciongfdsacxzОценок пока нет
- Bloque1 NumerosComplejosДокумент12 страницBloque1 NumerosComplejosgfdsacxzОценок пока нет
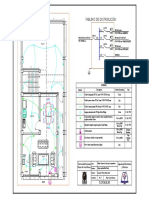
- Hoja de Procesos CaballoДокумент2 страницыHoja de Procesos CaballogfdsacxzОценок пока нет
- Consulta Delta de DiracДокумент3 страницыConsulta Delta de DiracgfdsacxzОценок пока нет
- Triangulo de Potencia PDFДокумент2 страницыTriangulo de Potencia PDFMarco AlvarezОценок пока нет
- Fisica Unidad 2Документ7 страницFisica Unidad 2gfdsacxzОценок пока нет
- Preparatorio Practica j1Документ2 страницыPreparatorio Practica j1gfdsacxzОценок пока нет
- Malla TelecomunicacionesДокумент1 страницаMalla TelecomunicacionesSebastian GaleanoОценок пока нет
- Lab07 - Primera Ley de Kirchhoff Laboratorio 001 PDFДокумент6 страницLab07 - Primera Ley de Kirchhoff Laboratorio 001 PDFSan Maycol FielОценок пока нет
- Torre de Antena ParabolicaДокумент8 страницTorre de Antena ParabolicaLylian HidalgoОценок пока нет
- Aip Sup C37 A25 2019 SKLTДокумент7 страницAip Sup C37 A25 2019 SKLTAndres SegoviaОценок пока нет
- Mapa Conceptual PDFДокумент1 страницаMapa Conceptual PDFFabio Rico Silva100% (1)
- 2.-Teoría de La Informacion - Chaile Unidad 4Документ18 страниц2.-Teoría de La Informacion - Chaile Unidad 4jose ruizОценок пока нет
- Mariana Andrea Oyarzún Ruiz - Protocolo DMXДокумент8 страницMariana Andrea Oyarzún Ruiz - Protocolo DMXazumi_93Оценок пока нет
- Organización y Arquitectura de computadoras-Resumen-StallingДокумент67 страницOrganización y Arquitectura de computadoras-Resumen-StallingJorge Linares75% (4)
- User Guide VERTIV - GXT RT+ (REV0 11-2019) (EU Spanish)Документ34 страницыUser Guide VERTIV - GXT RT+ (REV0 11-2019) (EU Spanish)saci.01022023Оценок пока нет
- Seccion 9.6 y 20 - InstrumentacionIndustrialДокумент123 страницыSeccion 9.6 y 20 - InstrumentacionIndustrialpauloОценок пока нет
- Componentes Basicos 2Документ5 страницComponentes Basicos 2Mauricio CaballeroОценок пока нет
- Informe ECGДокумент8 страницInforme ECGhopkeinstОценок пока нет
- Practica 8Документ7 страницPractica 8IFrigoFatalОценок пока нет
- Informe 2.2Документ41 страницаInforme 2.2DavidОценок пока нет
- Receptor Imu-Rtk Inteligente Y Versátil: Topografía & IngenieríaДокумент4 страницыReceptor Imu-Rtk Inteligente Y Versátil: Topografía & IngenieríaMisael M. Mendoza M.Оценок пока нет
- HSC Domonial ES DS C PDFДокумент2 страницыHSC Domonial ES DS C PDFRaul SaviОценок пока нет
- Cámara Termográfica Flir T200Документ54 страницыCámara Termográfica Flir T200hexmar rodriguezОценок пока нет
- Ramirez Alexis Preparatorio1aДокумент19 страницRamirez Alexis Preparatorio1aAlexis RamirezОценок пока нет
- Plano de Distribución - 1 NivelДокумент1 страницаPlano de Distribución - 1 NivelMax Fredi Quispe AguilarОценок пока нет
- Protocolo OSIДокумент12 страницProtocolo OSIEliannys PalaciosОценок пока нет
- Laseres MonomodoДокумент10 страницLaseres Monomodokisara137Оценок пока нет
- AdyacenciasДокумент6 страницAdyacenciasCristian LlanosОценок пока нет
- Unidad1.Fundamentos de Programación Industrial. Diapositivas PDFДокумент33 страницыUnidad1.Fundamentos de Programación Industrial. Diapositivas PDFJorge Carrascal GarcíaОценок пока нет
- Exposicion ARQUITECTURA DE VON NEUMANNДокумент9 страницExposicion ARQUITECTURA DE VON NEUMANNYimabel TumbacoОценок пока нет
- 02 - Practica Compuertas LógicasДокумент6 страниц02 - Practica Compuertas LógicasPeggyОценок пока нет
- Practica Procesamiento de ImagenesДокумент12 страницPractica Procesamiento de ImagenesMarialii LunaaОценок пока нет
- Circuitos Combinatorios ModularesДокумент19 страницCircuitos Combinatorios ModularesNicolas CastilloОценок пока нет
- MANUAL RSH - UMTS 1900 +LTE SHARING 2600 - v6.1 - AMДокумент39 страницMANUAL RSH - UMTS 1900 +LTE SHARING 2600 - v6.1 - AMJoan SebastianОценок пока нет
- Manual Punto A Punto-UbiquitiДокумент9 страницManual Punto A Punto-UbiquitiEsteban José García ZamoraОценок пока нет
- Canalizacion Fibra OpticaДокумент22 страницыCanalizacion Fibra Opticanazbba4Оценок пока нет