Вам также может понравиться
- NDT Treasures From The Past: Six Novel Technical Articles Spanning Four Decades of Industrial RadiographyОт EverandNDT Treasures From The Past: Six Novel Technical Articles Spanning Four Decades of Industrial RadiographyОценок пока нет
- Radio Research PaperДокумент5 страницRadio Research Paperibhuglbkf100% (1)
- NDT Handbook Vol - 8 2ed S1P2 History of The BorescopeДокумент5 страницNDT Handbook Vol - 8 2ed S1P2 History of The BorescopeJ. Carlos RGОценок пока нет
- Physics Group 5 & 6Документ32 страницыPhysics Group 5 & 6LELIОценок пока нет
- Forrest M. Mims III Semiconductor - DiodeLasersДокумент191 страницаForrest M. Mims III Semiconductor - DiodeLasersهبة صوالОценок пока нет
- Ben Cassen and The Development of The Rectilinear ScannerДокумент6 страницBen Cassen and The Development of The Rectilinear ScannerTuấn Hồ TrọngОценок пока нет
- Infra Red Detectors: M. Tech Credit Seminar Report, Electronic Systems Group, EE Dept, IIT Bombay Submitted Oct O4Документ28 страницInfra Red Detectors: M. Tech Credit Seminar Report, Electronic Systems Group, EE Dept, IIT Bombay Submitted Oct O4Tan HuynhОценок пока нет
- PM280Документ29 страницPM280SAMEERA FATHIMAL M (RA2113011011002)Оценок пока нет
- Brijesh Laser TechnologyДокумент32 страницыBrijesh Laser TechnologyBrijesh YadavОценок пока нет
- 12 2devphasedarrayДокумент20 страниц12 2devphasedarrayReza GholamiОценок пока нет
- Literature Review On Night Vision TechnologyДокумент7 страницLiterature Review On Night Vision Technologyxwrcmecnd100% (1)
- Fiber-Optic Technologies - A Brief History of Fiber-Optic Communications PDFДокумент17 страницFiber-Optic Technologies - A Brief History of Fiber-Optic Communications PDFNhat Khanh BuiОценок пока нет
- The History, Trends, and Future of Infrared Technology - DSIACДокумент21 страницаThe History, Trends, and Future of Infrared Technology - DSIACg c agnihotriОценок пока нет
- Industrial X-Ray Inspection - An Overview: 1. PreliminariesДокумент9 страницIndustrial X-Ray Inspection - An Overview: 1. Preliminariesfredy1969Оценок пока нет
- History of Vibration AnalyzersДокумент6 страницHistory of Vibration AnalyzersCrusherjpОценок пока нет
- TEMPEST: A Signal ProblemДокумент5 страницTEMPEST: A Signal ProblemJoe BloeОценок пока нет
- 30 Years of Radionics (Kelly)Документ6 страниц30 Years of Radionics (Kelly)Frater T.A.S.100% (1)
- Laser)Документ18 страницLaser)preeti307100% (3)
- TEMPEST: A Signal ProblemДокумент5 страницTEMPEST: A Signal ProblemChintan GhateОценок пока нет
- This Chapter Includes The Following Sections:: A Brief History of Fiber-Optic CommunicationsДокумент26 страницThis Chapter Includes The Following Sections:: A Brief History of Fiber-Optic Communicationstaahir25Оценок пока нет
- Photo Multiplier HandbookДокумент179 страницPhoto Multiplier HandbookibexatОценок пока нет
- Basic Principles of Ultrasonic TestingДокумент98 страницBasic Principles of Ultrasonic TestingSaikat HalderОценок пока нет
- Electronics Research Laboratory: University of CaliforniaДокумент24 страницыElectronics Research Laboratory: University of Californiaطربوش التميميОценок пока нет
- LASERS: A Walk Through History: Laser: Fundamentals and ApplicationsДокумент25 страницLASERS: A Walk Through History: Laser: Fundamentals and ApplicationsOsborne KachajeОценок пока нет
- Chapter 1 Optical Fiber Transmission Media - TOMASIДокумент46 страницChapter 1 Optical Fiber Transmission Media - TOMASImaharaniayulestariОценок пока нет
- Anachem Reporting With Miming12Документ24 страницыAnachem Reporting With Miming12Kyrelle FerrerОценок пока нет
- Grid, Appron and Gonad ShieldДокумент18 страницGrid, Appron and Gonad ShieldFinna Tryasti Fidianti1BОценок пока нет
- Computed Tomography FinalДокумент180 страницComputed Tomography FinalreycardoОценок пока нет
- Basic Principles of Ultrasonic TestingДокумент73 страницыBasic Principles of Ultrasonic TestingAhmed Adel100% (2)
- Project Cyclops-A Design Study of A System For Detecting Extraterrestrial Intelligent LifeДокумент258 страницProject Cyclops-A Design Study of A System For Detecting Extraterrestrial Intelligent LifeClinton RiddleОценок пока нет
- Event Horizon Telescope: Case Study 2Документ4 страницыEvent Horizon Telescope: Case Study 2Vaibhav Krishna SinghОценок пока нет
- Chirp RadarДокумент64 страницыChirp RadarLuis Gonzalo Baldeon HuanquiОценок пока нет
- A Brief History of UWB CommunicationsДокумент8 страницA Brief History of UWB CommunicationsNoha MoustafaОценок пока нет
- Centrífuga BeckmanДокумент1 страницаCentrífuga BeckmanItzel JuárezОценок пока нет
- Presenting by SE-BME Students: Nisarg Mehetre (A-10) Nidhi Mhatre (A-11)Документ23 страницыPresenting by SE-BME Students: Nisarg Mehetre (A-10) Nidhi Mhatre (A-11)A-42 Aditya PandeОценок пока нет
- Laser Technik Journal - 2010 - Hecht - The First Half Century of Laser DevelopmentДокумент6 страницLaser Technik Journal - 2010 - Hecht - The First Half Century of Laser DevelopmentQuý Tân HàОценок пока нет
- ARRL AC v2Документ213 страницARRL AC v2Rdp 4Оценок пока нет
- Optical FibresДокумент21 страницаOptical FibresSanjeev Kumar80% (5)
- 308 Prelim Topic 1 4Документ13 страниц308 Prelim Topic 1 4ptrcksx.jОценок пока нет
- Technical Journal: The Bell SystemДокумент64 страницыTechnical Journal: The Bell SystemVEGA SPACEОценок пока нет
- Brief Overview: What Is Cyborg Communication Channels Brain-Computer Interfacing Applications Future FantasyДокумент24 страницыBrief Overview: What Is Cyborg Communication Channels Brain-Computer Interfacing Applications Future FantasyZatin GuptaОценок пока нет
- PetEvalCh1 PDFДокумент16 страницPetEvalCh1 PDFIbtihaj AtiqОценок пока нет
- 1 4963228644928389236 PDFДокумент196 страниц1 4963228644928389236 PDFAlexandre Barbieri Folatre100% (3)
- Lect 1 Introduction Radar Signal ProcessingДокумент31 страницаLect 1 Introduction Radar Signal ProcessingMuhammad Imran Baig100% (1)
- Why L-Band - News - SparkFun ElectronicsДокумент7 страницWhy L-Band - News - SparkFun ElectronicsExia CloneОценок пока нет
- Fiber Optics: Lovely Professional UniversityДокумент16 страницFiber Optics: Lovely Professional UniversityEr Vijay Shukla100% (1)
- Utt NotesДокумент82 страницыUtt NotesDenzil D'SouzaОценок пока нет
- A Fiber Optics TimelineДокумент3 страницыA Fiber Optics Timelineshadia saad balochОценок пока нет
- Balanis - Antenna Theory ReviewДокумент17 страницBalanis - Antenna Theory ReviewVulpe FlorianОценок пока нет
- A Blind Mobility Aid Modeled After Echolocation of Bats: A On in FM A in A Is 70 So As A A inДокумент5 страницA Blind Mobility Aid Modeled After Echolocation of Bats: A On in FM A in A Is 70 So As A A inSagor SahaОценок пока нет
- Digital Radio GraphsДокумент80 страницDigital Radio GraphsMunish DograОценок пока нет
- Chapter 13Документ10 страницChapter 13EjОценок пока нет
- The Diode Laser The First 30 Days, 40 Years AgoДокумент6 страницThe Diode Laser The First 30 Days, 40 Years AgodoroteaОценок пока нет
- Production of X-RaysДокумент22 страницыProduction of X-RaysMohammad AashikSS34Оценок пока нет
- Radar Signals: An Introduction to Theory and ApplicationОт EverandRadar Signals: An Introduction to Theory and ApplicationРейтинг: 3 из 5 звезд3/5 (2)
- Fiber Optic Sensors: An Introduction for Engineers and ScientistsОт EverandFiber Optic Sensors: An Introduction for Engineers and ScientistsEric UddОценок пока нет
- American University of Beirut PSPA 210: Intro. To Political ThoughtДокумент4 страницыAmerican University of Beirut PSPA 210: Intro. To Political Thoughtcharles murrОценок пока нет
- Kübra Şendoğan CVДокумент5 страницKübra Şendoğan CVKübra ŞendoğanОценок пока нет
- Hssive-Xi-Chem-4. Chemical Bonding and Molecular Structure Q & AДокумент11 страницHssive-Xi-Chem-4. Chemical Bonding and Molecular Structure Q & AArties MОценок пока нет
- Dadm Assesment #2: Akshat BansalДокумент24 страницыDadm Assesment #2: Akshat BansalAkshatОценок пока нет
- Weather Prediction Using Machine Learning TechniquessДокумент53 страницыWeather Prediction Using Machine Learning Techniquessbakiz89Оценок пока нет
- 2019 Auto Truck Key Blank Reference PDFДокумент188 страниц2019 Auto Truck Key Blank Reference PDFAlbert RodaОценок пока нет
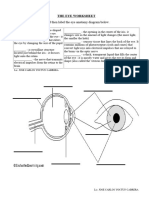
- The Eye WorksheetДокумент3 страницыThe Eye WorksheetCally ChewОценок пока нет
- MnemonicsДокумент1 страницаMnemonicsSunil Boyz-uОценок пока нет
- First Semester-NOTESДокумент182 страницыFirst Semester-NOTESkalpanaОценок пока нет
- Army Public School No.1 Jabalpur Practical List - Computer Science Class - XIIДокумент4 страницыArmy Public School No.1 Jabalpur Practical List - Computer Science Class - XIIAdityaОценок пока нет
- Summer Internship Project Report ANALYSIДокумент60 страницSummer Internship Project Report ANALYSIKshitija KudacheОценок пока нет
- MATLAB For Data VisualizationДокумент63 страницыMATLAB For Data Visualizationfahmi fawjiОценок пока нет
- Fortigate System Admin 40 Mr2Документ115 страницFortigate System Admin 40 Mr2KhaleelОценок пока нет
- Green ChemistryДокумент17 страницGreen ChemistryAaditya RamanОценок пока нет
- Instruction Manual Il-Obct-R1: Slip-Over Current Transformer ObctДокумент2 страницыInstruction Manual Il-Obct-R1: Slip-Over Current Transformer Obctبوحميدة كمالОценок пока нет
- Manual ML 1675 PDFДокумент70 страницManual ML 1675 PDFSergio de BedoutОценок пока нет
- Datasheet Brahma (2023)Документ8 страницDatasheet Brahma (2023)Edi ForexОценок пока нет
- Water Works RTAДокумент15 страницWater Works RTAalfaza3Оценок пока нет
- Exchange 2010 UnderstandДокумент493 страницыExchange 2010 UnderstandSeKoFieОценок пока нет
- Project - Dreambox Remote Video StreamingДокумент5 страницProject - Dreambox Remote Video StreamingIonut CristianОценок пока нет
- Early Childhood Education and CareДокумент53 страницыEarly Childhood Education and CareBianca ALbuquerqueОценок пока нет
- Th-Sunday Magazine 6 - 2Документ8 страницTh-Sunday Magazine 6 - 2NianotinoОценок пока нет
- Bridging The Divide Between Saas and Enterprise Datacenters: An Oracle White Paper Feb 2010Документ18 страницBridging The Divide Between Saas and Enterprise Datacenters: An Oracle White Paper Feb 2010Danno NОценок пока нет
- LADP HPДокумент11 страницLADP HPrupeshsoodОценок пока нет
- VDA Volume Assessment of Quality Management Methods Guideline 1st Edition November 2017 Online-DocumentДокумент36 страницVDA Volume Assessment of Quality Management Methods Guideline 1st Edition November 2017 Online-DocumentR JОценок пока нет
- GDCR - Second RevisedДокумент290 страницGDCR - Second RevisedbhaveshbhoiОценок пока нет
- Annexure To SOW 3 STD Specification For Welding and NDT PipingДокумент15 страницAnnexure To SOW 3 STD Specification For Welding and NDT PipingASHISH GORDEОценок пока нет
- Pathophysiology: DR - Wasfi Dhahir Abid AliДокумент9 страницPathophysiology: DR - Wasfi Dhahir Abid AliSheryl Ann PedinesОценок пока нет
- Part TOEFLДокумент7 страницPart TOEFLFrisca Rahma DwinantiОценок пока нет
- RL78 L1B UsermanualДокумент1 062 страницыRL78 L1B UsermanualHANUMANTHA RAO GORAKAОценок пока нет