Вам также может понравиться
- A Numerical Study On Bolted End-Plate Connection Using Shape Memory Alloys PDFДокумент9 страницA Numerical Study On Bolted End-Plate Connection Using Shape Memory Alloys PDFmdkmlОценок пока нет
- Buckling Analysis of Woven Glass Epoxy Laminated Composite PlateДокумент8 страницBuckling Analysis of Woven Glass Epoxy Laminated Composite PlateAJER JOURNALОценок пока нет
- Advanced Mechanics of Composite Materials and Structural ElementsОт EverandAdvanced Mechanics of Composite Materials and Structural ElementsОценок пока нет
- Free From Damage Beam-To-Column Joints: Testing and Design of DST Connections With Friction PadsДокумент30 страницFree From Damage Beam-To-Column Joints: Testing and Design of DST Connections With Friction PadsVincenzo PilusoОценок пока нет
- 4.2 Solution (Static Analysis) 44Документ67 страниц4.2 Solution (Static Analysis) 44Raj Deep TiwariОценок пока нет
- Biaxial Testing of High Strength Carbon Fiber Composite Cylinders For Pulsed Magnet ReinforcementДокумент6 страницBiaxial Testing of High Strength Carbon Fiber Composite Cylinders For Pulsed Magnet ReinforcementMartín KunuschОценок пока нет
- Research Article: Comparison of Bending Fatigue of Niti and Cualmn Shape Memory Alloy BarsДокумент10 страницResearch Article: Comparison of Bending Fatigue of Niti and Cualmn Shape Memory Alloy Barsr3dh34rtОценок пока нет
- SMR Matr Struct 11Документ13 страницSMR Matr Struct 11Zaher Mhd SharafОценок пока нет
- Finite Element Analysis of Composite Pressure Vessels With A Load Sharing Metallic LinerДокумент9 страницFinite Element Analysis of Composite Pressure Vessels With A Load Sharing Metallic Linervsraju2Оценок пока нет
- Analysis of Compression of Hollow Circular Elastomeric Bearings 1992Документ9 страницAnalysis of Compression of Hollow Circular Elastomeric Bearings 1992ciscoОценок пока нет
- Behaviour of Smart Reinforced Concrete Beam With Super Elastic Shape Memory Alloy Subjected To Monotonic LoadingДокумент11 страницBehaviour of Smart Reinforced Concrete Beam With Super Elastic Shape Memory Alloy Subjected To Monotonic Loadingnoor ayaadОценок пока нет
- Bond Strength of Lap Spliced Bars in ConcreteДокумент12 страницBond Strength of Lap Spliced Bars in ConcreteDilhara WickramaarachchiОценок пока нет
- FPL 2020 Pantelides001Документ11 страницFPL 2020 Pantelides001SharonPaladinesОценок пока нет
- Effects of Stacking Sequence and Clamping Forceon The Bearing Strength of Mechanically Fastened Joints in Composite LaminatesДокумент9 страницEffects of Stacking Sequence and Clamping Forceon The Bearing Strength of Mechanically Fastened Joints in Composite Laminateskhudhayer1970Оценок пока нет
- Cyclic Loading AdalahДокумент13 страницCyclic Loading AdalahsyaniliffaОценок пока нет
- Toshihisa - IABSEДокумент12 страницToshihisa - IABSEvicmoc2000Оценок пока нет
- 3D Finite Element Modeling To Study The Behavior of Shape Memory Alloy Confined ConcreteДокумент10 страниц3D Finite Element Modeling To Study The Behavior of Shape Memory Alloy Confined ConcreteYahia Raad Al-AniОценок пока нет
- Bond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingДокумент11 страницBond of Deformed Bars in Steel Fibre Reinforced Concrete Under Cyclic LoadingMarimuthu KaliyamoorthyОценок пока нет
- Ductility and Ultimate Strength of Eccentric Braced Frame: AbstractДокумент7 страницDuctility and Ultimate Strength of Eccentric Braced Frame: AbstractAmy VinehouseОценок пока нет
- Plastic Buckling of Axially Compressed Cylinders: Correlation Between Theory and ExperimentsДокумент10 страницPlastic Buckling of Axially Compressed Cylinders: Correlation Between Theory and ExperimentsTJPRC PublicationsОценок пока нет
- Published 10.1201 - 9780429426506-204 PDFДокумент5 страницPublished 10.1201 - 9780429426506-204 PDFMohammad Ali MahdavipourОценок пока нет
- Failure Behaviour of Particulate-Reinforced Aluminium Alloy Composites Under Uniaxial TensionДокумент10 страницFailure Behaviour of Particulate-Reinforced Aluminium Alloy Composites Under Uniaxial Tensionamalendu_biswas_1Оценок пока нет
- Composite Patch Reinforcement of A Cracked Simply-Supported Beam Traversed by Moving MassДокумент14 страницComposite Patch Reinforcement of A Cracked Simply-Supported Beam Traversed by Moving MassMike PenceОценок пока нет
- Composite Materials Technology 31-07-2010 25Документ7 страницComposite Materials Technology 31-07-2010 25aannbb12Оценок пока нет
- Correlation Between Tensile and Indentation Behavior of Particle-Reinforced Metal Matrix Composites: An Experimental and Numerical StudyДокумент11 страницCorrelation Between Tensile and Indentation Behavior of Particle-Reinforced Metal Matrix Composites: An Experimental and Numerical StudyPeeka Prabhakara RaoОценок пока нет
- Interfaces and Interfacial Mechanics: Influence On The Mechanical Behavior of Ceramic Matrix Composites (CMC)Документ11 страницInterfaces and Interfacial Mechanics: Influence On The Mechanical Behavior of Ceramic Matrix Composites (CMC)Kãmílïå KamilaОценок пока нет
- A Modified Test For Measuring The Interlaminar Tensile Strength of Fiber Reinforced Composites Anthony G Evans ModifiedWeaverДокумент7 страницA Modified Test For Measuring The Interlaminar Tensile Strength of Fiber Reinforced Composites Anthony G Evans ModifiedWeaverSyavash EnshaОценок пока нет
- FPFComposite JPCSA4 R1Документ9 страницFPFComposite JPCSA4 R1Adell FebriОценок пока нет
- Column Webs in Steel Beam-To-Column Connexions Part I-Formulation and VerificationДокумент27 страницColumn Webs in Steel Beam-To-Column Connexions Part I-Formulation and VerificationSabra SABRAОценок пока нет
- "Small-Span Bending TestДокумент7 страниц"Small-Span Bending TestMinhazul Abedin RiadОценок пока нет
- Mechanisms of Shotcrete Roof Support: C. Banton, M.S. Diederichs, D.J. Hutchinson S. EspleyДокумент6 страницMechanisms of Shotcrete Roof Support: C. Banton, M.S. Diederichs, D.J. Hutchinson S. EspleyAlexandre GomesОценок пока нет
- The Effect of Galvanizing On The Mechanical Resistance and Fatigue Toughness of A Spot Welded Assembly Made of AISI410 MartensiteДокумент12 страницThe Effect of Galvanizing On The Mechanical Resistance and Fatigue Toughness of A Spot Welded Assembly Made of AISI410 Martensitenico0001586Оценок пока нет
- Torsional Deformation and Fatigue Behaviour of 6061 Aluminium AlloyДокумент12 страницTorsional Deformation and Fatigue Behaviour of 6061 Aluminium Alloyvahid66466Оценок пока нет
- External Prestressing Concrete Columns With Fibrous Composite BeltsДокумент16 страницExternal Prestressing Concrete Columns With Fibrous Composite BeltsmagdyamdbОценок пока нет
- 2010EQConf 000687Документ8 страниц2010EQConf 000687noor ayaadОценок пока нет
- Stuttgart Seiltagung IMWДокумент14 страницStuttgart Seiltagung IMWSelva Kumar0% (1)
- IEEE PapersДокумент12 страницIEEE PapersPANNERSELVAMОценок пока нет
- Fatigue Properties of Vibration-Welded Nylon 6 and Nylon 66 Reinforced With Glass FibresДокумент9 страницFatigue Properties of Vibration-Welded Nylon 6 and Nylon 66 Reinforced With Glass Fibresdan_rusaiОценок пока нет
- Thin Film Shape Memory CompositesДокумент15 страницThin Film Shape Memory Compositesletter_ashish4444Оценок пока нет
- Static and Fatigue Behaviour of Hexagonal Honeycomb Cores Under In-Plane Shear LoadsДокумент19 страницStatic and Fatigue Behaviour of Hexagonal Honeycomb Cores Under In-Plane Shear LoadsAnto PellisseryОценок пока нет
- Lab3testingfinish 171218033623Документ29 страницLab3testingfinish 171218033623jahremade jahremadeОценок пока нет
- Buckling of Thin-Walled Conical Shells Under Uniform External PressureДокумент14 страницBuckling of Thin-Walled Conical Shells Under Uniform External PressureAnonymous wWOWz9UnWОценок пока нет
- Experimental Investigation On Buckling and Post-Buckling Behavior of Superelastic Shape Memory Alloy BarsДокумент14 страницExperimental Investigation On Buckling and Post-Buckling Behavior of Superelastic Shape Memory Alloy BarsDuraBraceОценок пока нет
- Tension Buckling in Multilayer Elastomeric Isolation BearingsДокумент18 страницTension Buckling in Multilayer Elastomeric Isolation BearingsRodolfo CAОценок пока нет
- Design and Analysis of Filament Wound Composite Pressure Vessel With Integrated-End DomesДокумент9 страницDesign and Analysis of Filament Wound Composite Pressure Vessel With Integrated-End DomesmrezaianОценок пока нет
- Composite Beams: P. AnsourianДокумент27 страницComposite Beams: P. AnsourianLeonardoMadeira11Оценок пока нет
- Testing and Design of Gravity-Loaded Steel Purlins Restrained by SheetingДокумент10 страницTesting and Design of Gravity-Loaded Steel Purlins Restrained by SheetingamokeОценок пока нет
- Load Carrying Capacity of Z-Purlins With A.C. Sheet CladdingДокумент21 страницаLoad Carrying Capacity of Z-Purlins With A.C. Sheet CladdingSRINIVAS DОценок пока нет
- Performance of Joints in Steel Storage Pallet RacksДокумент11 страницPerformance of Joints in Steel Storage Pallet RacksMichael Torres100% (1)
- Jurnal FiberglassДокумент10 страницJurnal FiberglassChristian Jovie YudhanantaОценок пока нет
- Tensile Stress-Strain Relationship For Ferro Cement StructuresДокумент14 страницTensile Stress-Strain Relationship For Ferro Cement StructuresSulaiman Mohsin AbdulAzizОценок пока нет
- Delamination ConceptДокумент8 страницDelamination ConceptHIMANSHU KUMARОценок пока нет
- Analysis of An Adhesively Bonded Single Strap Join 2007 International JournaДокумент18 страницAnalysis of An Adhesively Bonded Single Strap Join 2007 International Journa姚志豪Оценок пока нет
- The Torsional Restraint of Sandwich Panels ToДокумент8 страницThe Torsional Restraint of Sandwich Panels ToViorel UngureanuОценок пока нет
- AMME - Volume 18 - Issue 18th International Conference On Applied Mechanics and Mechanical Engineering. - Pages 1-15Документ15 страницAMME - Volume 18 - Issue 18th International Conference On Applied Mechanics and Mechanical Engineering. - Pages 1-15Valentina DiamanteОценок пока нет
- Design of Fiber Reinforced Composite PreДокумент13 страницDesign of Fiber Reinforced Composite Premirza_munir_baig995Оценок пока нет
- Analyzing The Buckling Strength of Stiffened Steel Plates With Longitudinal Stiffeners Subjected To Uniaxial CompressionДокумент5 страницAnalyzing The Buckling Strength of Stiffened Steel Plates With Longitudinal Stiffeners Subjected To Uniaxial CompressionOraib AljaafrehОценок пока нет
- Plaxis Input Soldier PileДокумент5 страницPlaxis Input Soldier PileAhmed KarimОценок пока нет
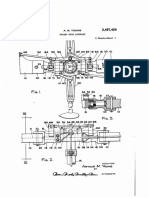
- Bell Helicopter Stabilizer BarДокумент6 страницBell Helicopter Stabilizer Barjorge paez100% (1)
- 12VCE Physics Notes 2014Документ135 страниц12VCE Physics Notes 2014zachbeefОценок пока нет
- Annular Pressure Seals and Hydrostatic Bearings: Luis San AndrésДокумент36 страницAnnular Pressure Seals and Hydrostatic Bearings: Luis San AndrésisidropeОценок пока нет
- Study of Electromagnetic Vibration Energy Harvesti PDFДокумент15 страницStudy of Electromagnetic Vibration Energy Harvesti PDFPravesh KumarОценок пока нет
- Thermodynamics For Mechanical EngineeringДокумент294 страницыThermodynamics For Mechanical EngineeringCalix TV100% (1)
- Turning Effect of ForcesДокумент7 страницTurning Effect of ForcesSyed M HassanОценок пока нет
- Me8693 LNДокумент210 страницMe8693 LNGautham BVОценок пока нет
- Transverse Cantiliver, Free, Simply SupportedДокумент3 страницыTransverse Cantiliver, Free, Simply SupportedmuralidharanОценок пока нет
- ENSC 12 Chapter 1 Part 1Документ52 страницыENSC 12 Chapter 1 Part 1Shyla JopiaОценок пока нет
- Analysis of Unidirectional and Bi Directional Flow Heat ExchangersДокумент6 страницAnalysis of Unidirectional and Bi Directional Flow Heat ExchangersvinodОценок пока нет
- Column Interaction DiagramДокумент4 страницыColumn Interaction Diagramraju_420034520Оценок пока нет
- Solidworks Flow Simulation PDFДокумент10 страницSolidworks Flow Simulation PDFtyuОценок пока нет
- 035 JHP 09Документ15 страниц035 JHP 09Javier AlvarezОценок пока нет
- Vortex Methods Theory and Practice by Georges Henri Cottet PDFДокумент4 страницыVortex Methods Theory and Practice by Georges Henri Cottet PDFLam Trinh NguyenОценок пока нет
- Hacon TMДокумент68 страницHacon TMTiago CoutoОценок пока нет
- LandingString, 80%, 5.875 OD, 0.750 Wall, IEU, S-135.. XT57 (7.250 X 3.500)Документ3 страницыLandingString, 80%, 5.875 OD, 0.750 Wall, IEU, S-135.. XT57 (7.250 X 3.500)Garcia C L AlbertoОценок пока нет
- Module 4. Induction Type Indicating InstrumentsДокумент6 страницModule 4. Induction Type Indicating InstrumentsAmit Kr GodaraОценок пока нет
- UGSemsterSyllabus Physics 6Sem618Physics English ModernPhysics PDFДокумент212 страницUGSemsterSyllabus Physics 6Sem618Physics English ModernPhysics PDFhidara7158Оценок пока нет
- CHEN3005 Process Instrumentation and ControlДокумент4 страницыCHEN3005 Process Instrumentation and ControlVincent Ys TanОценок пока нет
- Chapter 4 RadiationДокумент47 страницChapter 4 RadiationKamal JamaliОценок пока нет
- Welded C ChannelДокумент3 страницыWelded C ChannelНемања Караклајић100% (1)
- ABAQUS TutorialДокумент6 страницABAQUS TutorialAffiz_Afripin_4289Оценок пока нет
- Effect On Barrage Raft Floor Due To Intrusion of RockДокумент7 страницEffect On Barrage Raft Floor Due To Intrusion of RockgovindarajОценок пока нет
- Design of The University of Akrons 2015 FSAE Electric Vehicle BRДокумент57 страницDesign of The University of Akrons 2015 FSAE Electric Vehicle BRrahul jainОценок пока нет
- Valve Sizing - Flow RateДокумент19 страницValve Sizing - Flow RateMohammed AzeemОценок пока нет
- VibrationДокумент18 страницVibrationKamille NayraОценок пока нет
- Topic 2 - Practical 2: Determination of Mass Using Balanced ForcesДокумент2 страницыTopic 2 - Practical 2: Determination of Mass Using Balanced ForcesYash MehtaОценок пока нет
- Aviation Aerodynamics Notes For CPLДокумент93 страницыAviation Aerodynamics Notes For CPL6E-TeamОценок пока нет
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tОт EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Analog Design and Simulation Using OrCAD Capture and PSpiceОт EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceОценок пока нет
- The Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneОт EverandThe Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneРейтинг: 4.5 из 5 звезд4.5/5 (5)
- Laws of UX: Using Psychology to Design Better Products & ServicesОт EverandLaws of UX: Using Psychology to Design Better Products & ServicesРейтинг: 5 из 5 звезд5/5 (9)
- 507 Mechanical Movements: Mechanisms and DevicesОт Everand507 Mechanical Movements: Mechanisms and DevicesРейтинг: 4 из 5 звезд4/5 (28)
- Articulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceОт EverandArticulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceРейтинг: 4 из 5 звезд4/5 (19)
- The Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsОт EverandThe Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsОценок пока нет
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureОт EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsОт EverandThe Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsРейтинг: 5 из 5 звезд5/5 (1)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchОт EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchРейтинг: 4 из 5 звезд4/5 (10)
- UX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesОт EverandUX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesОценок пока нет
- Delft Design Guide -Revised edition: Perspectives- Models - Approaches - MethodsОт EverandDelft Design Guide -Revised edition: Perspectives- Models - Approaches - MethodsОценок пока нет
- A Baker's Dozen: Real Analog Solutions for Digital DesignersОт EverandA Baker's Dozen: Real Analog Solutions for Digital DesignersРейтинг: 4 из 5 звезд4/5 (1)
- Designing for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionОт EverandDesigning for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionОценок пока нет
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersОт EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersРейтинг: 4 из 5 звезд4/5 (13)
- Design for How People Think: Using Brain Science to Build Better ProductsОт EverandDesign for How People Think: Using Brain Science to Build Better ProductsРейтинг: 4 из 5 звезд4/5 (8)
- Design Thinking and Innovation Metrics: Powerful Tools to Manage Creativity, OKRs, Product, and Business SuccessОт EverandDesign Thinking and Innovation Metrics: Powerful Tools to Manage Creativity, OKRs, Product, and Business SuccessОценок пока нет