Вам также может понравиться
- Modelo Carta de Renuncia ChileДокумент1 страницаModelo Carta de Renuncia ChileMiguel Ramirez Medina0% (2)
- Modelo Carta de Renuncia ChileДокумент1 страницаModelo Carta de Renuncia ChileMiguel Ramirez Medina0% (2)
- 2002 Manual para La Creación de Empresas Por UniversitariosДокумент170 страниц2002 Manual para La Creación de Empresas Por UniversitariosJavier Alfonso MarinОценок пока нет
- Tarea 2Документ22 страницыTarea 2Sativa IndicaОценок пока нет
- Casa P Cerro Azul-1-11-11Документ1 страницаCasa P Cerro Azul-1-11-11Juliho AlmonacidОценок пока нет
- II - EE CHINCHA NEW-ModelДокумент1 страницаII - EE CHINCHA NEW-ModelJuliho AlmonacidОценок пока нет
- Casa P Cerro Azul-1-11-9Документ1 страницаCasa P Cerro Azul-1-11-9Juliho AlmonacidОценок пока нет
- Casa P Cerro Azul-1-11-10Документ1 страницаCasa P Cerro Azul-1-11-10Juliho AlmonacidОценок пока нет
- Proyecto 111Документ2 страницыProyecto 111Juliho AlmonacidОценок пока нет
- Downlight LED 18W para Adosar: EnergíaДокумент1 страницаDownlight LED 18W para Adosar: EnergíaJuliho AlmonacidОценок пока нет
- PromartДокумент2 страницыPromartJuliho AlmonacidОценок пока нет
- (Ex) Une-En 61537 2002Документ4 страницы(Ex) Une-En 61537 2002Juliho Almonacid0% (1)
- Mermoria de Inst. Eléctricas SE R6000Документ8 страницMermoria de Inst. Eléctricas SE R6000Juliho AlmonacidОценок пока нет
- ROOSEVELT - IIEE-01 R6000 SE REV2 - ENERO 2022-ModelДокумент1 страницаROOSEVELT - IIEE-01 R6000 SE REV2 - ENERO 2022-ModelJuliho AlmonacidОценок пока нет
- Hoja Técnica Luminaria Lineal Prismática Anhui LanruiДокумент1 страницаHoja Técnica Luminaria Lineal Prismática Anhui LanruiJuliho AlmonacidОценок пока нет
- 76 102 Led 36W 65K SensДокумент2 страницы76 102 Led 36W 65K SensJuliho AlmonacidОценок пока нет
- Formato Acuerdo de Reubicación de Infraestructura de TelecomunicacionesДокумент13 страницFormato Acuerdo de Reubicación de Infraestructura de TelecomunicacionesJuliho AlmonacidОценок пока нет
- Diptico Sgi PDFДокумент2 страницыDiptico Sgi PDFApplicant ForveОценок пока нет
- Requerimientos RinconadaДокумент1 страницаRequerimientos RinconadaJuliho AlmonacidОценок пока нет
- Fichas Tecnicas - Equipos Centrifugos en GabineteДокумент16 страницFichas Tecnicas - Equipos Centrifugos en GabineteJuliho AlmonacidОценок пока нет
- PromartДокумент2 страницыPromartJuliho AlmonacidОценок пока нет
- Eticket Ics010 11678021 2Документ1 страницаEticket Ics010 11678021 2Juliho AlmonacidОценок пока нет
- Esencial Rfi-208 (Ii - MM.)Документ1 страницаEsencial Rfi-208 (Ii - MM.)Juliho AlmonacidОценок пока нет
- Requerimientos RinconadaДокумент1 страницаRequerimientos RinconadaJuliho AlmonacidОценок пока нет
- Casco para La PracticaДокумент1 страницаCasco para La PracticaJuliho AlmonacidОценок пока нет
- Requerimientos Pedro Pablo AtuspariaДокумент1 страницаRequerimientos Pedro Pablo AtuspariaJuliho AlmonacidОценок пока нет
- Requerimientos Pedro Pablo AtuspariaДокумент1 страницаRequerimientos Pedro Pablo AtuspariaJuliho AlmonacidОценок пока нет
- Requerimientos Arcc1560 Inmaculda ConcepciónДокумент2 страницыRequerimientos Arcc1560 Inmaculda ConcepciónJuliho AlmonacidОценок пока нет
- Requerimientos Arcc1560 Inmaculda ConcepciónДокумент2 страницыRequerimientos Arcc1560 Inmaculda ConcepciónJuliho AlmonacidОценок пока нет
- EvaPrá03 E0159HДокумент1 страницаEvaPrá03 E0159HJuliho AlmonacidОценок пока нет
- EvaPrá03 E0159HДокумент1 страницаEvaPrá03 E0159HJuliho AlmonacidОценок пока нет
- Requerimientos Pedro Pablo AtuspariaДокумент1 страницаRequerimientos Pedro Pablo AtuspariaJuliho AlmonacidОценок пока нет
- Comunicado Semanal N 008 - Secundaria 2022Документ3 страницыComunicado Semanal N 008 - Secundaria 2022Dhalia Angosto MalpartidaОценок пока нет
- Plantilla Excel Gastos e Ingresos Del Hogar 1 1Документ3 страницыPlantilla Excel Gastos e Ingresos Del Hogar 1 1JesusОценок пока нет
- Denegatoria A GasnorpДокумент29 страницDenegatoria A GasnorpVictor LizaОценок пока нет
- Ingeniería de Transito y Transporte Actividad 2Документ13 страницIngeniería de Transito y Transporte Actividad 2Juan AndresОценок пока нет
- Trabajo de PavimentosДокумент35 страницTrabajo de PavimentosDoris Linares OlanoОценок пока нет
- La Matemática y Su Relación Con Las Ciencias Como Recurso PedagógicoДокумент3 страницыLa Matemática y Su Relación Con Las Ciencias Como Recurso PedagógicoRocioJulcaDiazОценок пока нет
- Guía No 10 - Catálogo de Costos Unitarios Primarios PDFДокумент123 страницыGuía No 10 - Catálogo de Costos Unitarios Primarios PDFLouis MatuzОценок пока нет
- 1.1°informe de Seminario de TituloДокумент10 страниц1.1°informe de Seminario de TituloMarco Nicolas Alarcon MendezОценок пока нет
- Ductos MetálicosДокумент10 страницDuctos MetálicosChave ChabeОценок пока нет
- Calculo Edificio PrefabricadoДокумент98 страницCalculo Edificio Prefabricadoguillermo_orteg5742100% (4)
- Diez Historias Sobre Vivienda ColectivaДокумент3 страницыDiez Historias Sobre Vivienda Colectivaanon_958087773Оценок пока нет
- Catalogue 3 SpanishДокумент216 страницCatalogue 3 Spanishrafael espinosa semperОценок пока нет
- Actividad de Aprendizaje 1.1Документ4 страницыActividad de Aprendizaje 1.1Ross CFОценок пока нет
- Ecp AndalucitaДокумент54 страницыEcp AndalucitagregoryОценок пока нет
- Curso Diseño y Seguridad de Sistemas Contra IncendiosДокумент2 страницыCurso Diseño y Seguridad de Sistemas Contra IncendiosGuille LRОценок пока нет
- Riego en EuropaДокумент19 страницRiego en EuropaJuan Jhunnior OAОценок пока нет
- Manual de Calificación de Soldadores para Acero Estructural PDFДокумент108 страницManual de Calificación de Soldadores para Acero Estructural PDFSebastian AhumadaОценок пока нет
- 201103041149200.MINEDUC Manual de Apoyo para Fortalecer Los Consejos EscolaresДокумент7 страниц201103041149200.MINEDUC Manual de Apoyo para Fortalecer Los Consejos EscolaresMaria Teresa RuizОценок пока нет
- Analisis y Diseño A FlexionДокумент13 страницAnalisis y Diseño A FlexionNubeat S.Оценок пока нет
- Plantilla ACTITUDESДокумент15 страницPlantilla ACTITUDESyenny naviaОценок пока нет
- Estiba y Carga CerezasДокумент6 страницEstiba y Carga CerezasPaula Andrea Del Valle0% (1)
- Sensor EsДокумент652 страницыSensor EsVicmanОценок пока нет
- Cotización Letrero en Neón y MuroДокумент4 страницыCotización Letrero en Neón y MuroVictor H. SánchezОценок пока нет
- 05 - Acritud y Recocido - 2020 - Rev2 - StudsДокумент41 страница05 - Acritud y Recocido - 2020 - Rev2 - StudsMartin ToscanoОценок пока нет
- LCD, Led y PlasmaДокумент40 страницLCD, Led y PlasmaGabriel De la CruzОценок пока нет
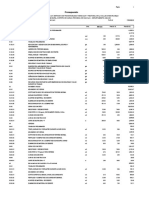
- Presupuesto CondormarcaДокумент2 страницыPresupuesto CondormarcaDeivy Andagua RamirezОценок пока нет
- Herramienta JawsДокумент2 страницыHerramienta JawsRené Fabricio RomeroОценок пока нет
- Fragmento, Aventura LiterrariaДокумент3 страницыFragmento, Aventura LiterrariaTheoCastroFigueroaОценок пока нет