Вам также может понравиться
- Variations Sur Le Schéma de Horner.Документ42 страницыVariations Sur Le Schéma de Horner.Ali Ait MessaoudОценок пока нет
- Calculs Vectoriels 2 Eme Sciences 2023Документ7 страницCalculs Vectoriels 2 Eme Sciences 2023coiffa100% (1)
- DM Ts Zeta2Документ1 страницаDM Ts Zeta2abdelОценок пока нет
- CM1&2 Algebre Boole PDFДокумент97 страницCM1&2 Algebre Boole PDFferdaousОценок пока нет
- Devoir Commun Math 1 Lycee PissarroДокумент3 страницыDevoir Commun Math 1 Lycee PissarroSaikou Oumar BarryОценок пока нет
- Schéma de HornerДокумент2 страницыSchéma de HornerJonas Vautherin100% (5)
- DéterminantsДокумент14 страницDéterminantsibouОценок пока нет
- Feuille de TD N°4Документ4 страницыFeuille de TD N°4landry dossahОценок пока нет
- 10 Fiche Inegalites Classiques EleveДокумент2 страницы10 Fiche Inegalites Classiques EleveABDELMOGHIT IDHSAINEОценок пока нет
- Arada Espaces Sobolev CoursДокумент44 страницыArada Espaces Sobolev CoursALFA -SILVERNIMOОценок пока нет
- PReparationДокумент1 страницаPReparationWldSla WatchОценок пока нет
- Leçon 1 Calcul LittéralДокумент10 страницLeçon 1 Calcul LittéralDieu Est FidèleОценок пока нет
- 1689273606Документ13 страниц1689273606Ahzen's AbОценок пока нет
- Examen D'analyse UPB2021-2022Документ1 страницаExamen D'analyse UPB2021-2022Ernest AnoОценок пока нет
- 2nde S2-TrigonometrieДокумент4 страницы2nde S2-TrigonometrieAhmadou Niass100% (1)
- Dérivation Et Etude Des FonctionsДокумент5 страницDérivation Et Etude Des FonctionsGueye Ousmane100% (1)
- TD71 Nombres ComplexesДокумент5 страницTD71 Nombres ComplexesayoubnextgenОценок пока нет
- CNC 2021 Math-2 MPДокумент4 страницыCNC 2021 Math-2 MPJoel WilliamsОценок пока нет
- Epreuve D'algèbre LinéaireДокумент1 страницаEpreuve D'algèbre LinéaireJ LioreОценок пока нет
- Prob A1Документ20 страницProb A1KilgraveОценок пока нет
- BaccalaureatS1999 PDFДокумент48 страницBaccalaureatS1999 PDFfahbilouf100% (1)
- 1594879511Документ16 страниц1594879511achrafОценок пока нет
- M1 Analyse Fonctionnelle Arada - NADIRДокумент42 страницыM1 Analyse Fonctionnelle Arada - NADIRALFA -SILVERNIMOОценок пока нет
- Corrigé (Matrices) PDFДокумент7 страницCorrigé (Matrices) PDFКхавла Ал-АиасхиОценок пока нет
- Examen SR (2017 18)Документ1 страницаExamen SR (2017 18)Mouad ElhaОценок пока нет
- Sujet Bac Série D - MathsДокумент3 страницыSujet Bac Série D - MathsBouba SmithОценок пока нет
- IntégrationДокумент27 страницIntégrationibouОценок пока нет
- TD 1Документ4 страницыTD 1Younes EL BAHRAOUI100% (1)
- Livre Du Professeur - Chapitre 2 - Fonctions de RéférenceДокумент97 страницLivre Du Professeur - Chapitre 2 - Fonctions de RéférencebnjОценок пока нет
- Commutant D'une MatriceДокумент12 страницCommutant D'une MatriceWarrior of the light100% (1)
- Matricecor PDFДокумент15 страницMatricecor PDFothman okОценок пока нет
- TD #1 (2023-2024 Logique) .AuxДокумент2 страницыTD #1 (2023-2024 Logique) .AuxGhof SARAОценок пока нет
- Le Barycentre Dans Le Plan Cours 1Документ7 страницLe Barycentre Dans Le Plan Cours 1thomsen azizОценок пока нет
- 1as ds1 (5exp) PDFДокумент12 страниц1as ds1 (5exp) PDFAhmed benabdelkaderОценок пока нет
- Banque CCP Sup Analyse Corrige 1Документ10 страницBanque CCP Sup Analyse Corrige 1Arnold KpovihouanouОценок пока нет
- Feuille 6 Calcul MatricielДокумент9 страницFeuille 6 Calcul MatricielAbdias PierreОценок пока нет
- TD - Intégration Des Fonctions Continues Sur Un SegmentДокумент2 страницыTD - Intégration Des Fonctions Continues Sur Un SegmentMaryam MaryamОценок пока нет
- 6.-Corrige Colle06 Reduction EndomorphismeДокумент6 страниц6.-Corrige Colle06 Reduction EndomorphismePeuitoОценок пока нет
- Bac 19 DДокумент3 страницыBac 19 DDieu Est Fidèle100% (1)
- Sujet Et Corrige Bac 2021 Mathematiques Serie DДокумент14 страницSujet Et Corrige Bac 2021 Mathematiques Serie DSabirou BAPARAPEОценок пока нет
- Exo BilДокумент2 страницыExo BilKhalid Zeg100% (1)
- Cours Math - Arithmétique Divisibilité Ans Z - Bac Math (2009-2010) MR Abdelbasset LaataouiДокумент4 страницыCours Math - Arithmétique Divisibilité Ans Z - Bac Math (2009-2010) MR Abdelbasset LaataouiSami KetataОценок пока нет
- Cahier de TextesДокумент9 страницCahier de Textesgenie RyodaneОценок пока нет
- Oly 2005 Inter-2Документ11 страницOly 2005 Inter-2Adan LunaОценок пока нет
- 2019 TD09 DerivationДокумент2 страницы2019 TD09 DerivationDoshey AllouОценок пока нет
- TP FreeFemДокумент15 страницTP FreeFemZakaria MaazazОценок пока нет
- Chapitre 2 - Vecteurs, Droites Et Plans de L'espaceДокумент63 страницыChapitre 2 - Vecteurs, Droites Et Plans de L'espaceblack HОценок пока нет
- Déterminants de Vandermonde Et de CauchyДокумент6 страницDéterminants de Vandermonde Et de CauchyMoad MalmiОценок пока нет
- ExercicesДокумент11 страницExercicesAE07Оценок пока нет
- Yas Anal4Документ171 страницаYas Anal4Fatima Doc0% (1)
- Matric 1Документ2 страницыMatric 1Sleh Ben Soltan100% (1)
- Exercices Angles OrientesДокумент2 страницыExercices Angles OrientesjosuemanueljsmОценок пока нет
- ExAlg2 PDFДокумент2 страницыExAlg2 PDFNabil Ait Brahim100% (1)
- ComparaisonДокумент9 страницComparaisonMaria Jose de las mercedes Costa AzulОценок пока нет
- Intégrales-Calcul D'aire-Bac S Métropole 2008 PDFДокумент3 страницыIntégrales-Calcul D'aire-Bac S Métropole 2008 PDFMourad MouradbensalemОценок пока нет
- Bac D-Ti Maths 2021Документ2 страницыBac D-Ti Maths 2021Abdelmoumene MousОценок пока нет
- Exercices Corriges 5Документ5 страницExercices Corriges 5AliBenMessaoud100% (1)
- La théorie des jeux: Thrillers judiciaires de Katerina Carter, #2От EverandLa théorie des jeux: Thrillers judiciaires de Katerina Carter, #2Оценок пока нет
- 1301857Документ29 страниц1301857Hamza ElallamОценок пока нет
- Exercice Pied À CoulisseДокумент5 страницExercice Pied À CoulisseKouki NizarОценок пока нет
- DessinДокумент9 страницDessinKouki NizarОценок пока нет
- Mecanicien FR BAT PDFДокумент20 страницMecanicien FR BAT PDFKouki NizarОценок пока нет
- Tournage ConiqueДокумент4 страницыTournage ConiqueKouki Nizar100% (1)
- CoupesДокумент4 страницыCoupesKouki NizarОценок пока нет
- 03 Techniquesdemesure PDFДокумент19 страниц03 Techniquesdemesure PDFStephane Durel Mbida100% (1)
- HPBS Repair Guideline Pagid FRДокумент34 страницыHPBS Repair Guideline Pagid FRKouki NizarОценок пока нет
- Chapitre 4 Moteur Courant Continu PDFДокумент7 страницChapitre 4 Moteur Courant Continu PDFKouki Nizar50% (2)
- Chapitre 5 Machine Asynchrone PDFДокумент10 страницChapitre 5 Machine Asynchrone PDFKouki NizarОценок пока нет
- Chapitre 2 Transformateur Monophase PDFДокумент5 страницChapitre 2 Transformateur Monophase PDFbeautiful music100% (1)
- Chapitre 1 Systemes Triphases Equilibres PDFДокумент9 страницChapitre 1 Systemes Triphases Equilibres PDFhdahmane78100% (1)
- Chapitre 3 Transformateur Triphase PDFДокумент4 страницыChapitre 3 Transformateur Triphase PDFbeautiful musicОценок пока нет
- CONTROLER ET REPARER UN SYSTEME DE FREIN A DISQUE. Fin TP OBJECTIF GENERALДокумент7 страницCONTROLER ET REPARER UN SYSTEME DE FREIN A DISQUE. Fin TP OBJECTIF GENERALKouki NizarОценок пока нет
- Shema MultifilaireДокумент1 страницаShema MultifilaireKouki NizarОценок пока нет
- GMAO OptiMaint - Procédures Installation Et Mise À JourДокумент21 страницаGMAO OptiMaint - Procédures Installation Et Mise À JourMike Nkouetcha100% (1)
- Chapitre 6b PDFДокумент30 страницChapitre 6b PDFJebari Abdellah100% (2)
- h5 TC Maintenance Coursv2 Coursv2 1783Документ180 страницh5 TC Maintenance Coursv2 Coursv2 1783stevin_doc100% (1)
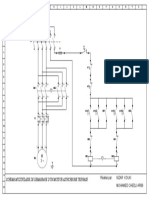
- Schemas de Demarrage MoteurДокумент1 страницаSchemas de Demarrage MoteurKouki NizarОценок пока нет
- Desc 241DO Maintenance IndustrielleДокумент4 страницыDesc 241DO Maintenance IndustrielleKouki NizarОценок пока нет
- Cours Module LGM 531-GHANMI PDFДокумент83 страницыCours Module LGM 531-GHANMI PDFKouki NizarОценок пока нет
- OptiMaint PDFДокумент7 страницOptiMaint PDFAymen Hssaini100% (1)
- 2 - Support Du Module Creation DEntreprises 1.2Документ84 страницы2 - Support Du Module Creation DEntreprises 1.2فدوى غانيОценок пока нет
- Culture D Entreprise - FondamentauxДокумент9 страницCulture D Entreprise - FondamentauxRégis AguileraОценок пока нет
- Cultureentreprise PDFДокумент13 страницCultureentreprise PDFKouki NizarОценок пока нет
- Dossier8 Management de Lorganisation Et Culture DentrepriseДокумент20 страницDossier8 Management de Lorganisation Et Culture DentrepriseKouki NizarОценок пока нет
- Chapitre 2 Transformateur Monophase PDFДокумент5 страницChapitre 2 Transformateur Monophase PDFbeautiful music100% (1)
- Chapitre 3 Transformateur Triphase PDFДокумент4 страницыChapitre 3 Transformateur Triphase PDFbeautiful musicОценок пока нет
- PierreJean BarreHDRДокумент159 страницPierreJean BarreHDRKouki NizarОценок пока нет
- Chapitre 1 Systemes Triphases Equilibres PDFДокумент9 страницChapitre 1 Systemes Triphases Equilibres PDFhdahmane78100% (1)
- Techniques de ClimatisationДокумент27 страницTechniques de ClimatisationMohamud Lhaf100% (1)
- CCNA 02 Introduction À l'IOSДокумент138 страницCCNA 02 Introduction À l'IOSyikhlefОценок пока нет
- Matematica În Egipul Antic FR 3Документ3 страницыMatematica În Egipul Antic FR 3Valeriu TurcanuОценок пока нет
- TP 2 InstrumentationДокумент6 страницTP 2 Instrumentationrami kafiОценок пока нет
- LC 22-001Документ7 страницLC 22-001Simon Houde100% (2)
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Документ4 страницыExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatОценок пока нет
- Macro ImportДокумент29 страницMacro ImportKamil ChamОценок пока нет
- QCM 5Документ2 страницыQCM 5HAPMRIОценок пока нет
- SALOMÉ Test Management FrameworkДокумент101 страницаSALOMÉ Test Management FrameworkPharell William BaldorОценок пока нет
- PLE CoursДокумент95 страницPLE CoursFranck-Olivier KassouОценок пока нет
- Enrobage EC2Документ7 страницEnrobage EC2Abdelkader Drr100% (1)
- Examen National Du BTS - Maintenance Industrielle - Session de Mai 2015Документ4 страницыExamen National Du BTS - Maintenance Industrielle - Session de Mai 2015enjy top1Оценок пока нет
- Joyeux Anniversaire Tab F - Partition Et PartiesДокумент2 страницыJoyeux Anniversaire Tab F - Partition Et PartiesMartinОценок пока нет
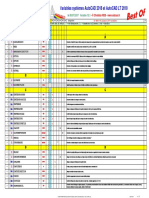
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESДокумент7 страницVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazeОценок пока нет
- TP BDV 2016Документ17 страницTP BDV 2016Khabtane AbdelhamidОценок пока нет
- Pvsyst Evaluation: Pvsyst - Rapport de SimulationДокумент7 страницPvsyst Evaluation: Pvsyst - Rapport de Simulationidriss habibiОценок пока нет
- TD1 CorДокумент9 страницTD1 Coramine jodar100% (1)
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jДокумент1 страницаADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DièneОценок пока нет
- Ifr AttДокумент9 страницIfr AttpatrouilledeafranceОценок пока нет
- FX808394F FlexES Control FX10 (10 Boucles)Документ1 страницаFX808394F FlexES Control FX10 (10 Boucles)Ramdane RamdanoОценок пока нет
- Crabol XXIV-3Документ2 страницыCrabol XXIV-3Pham Van DuongОценок пока нет
- 1-html CssДокумент88 страниц1-html CssSouleymane TraoreОценок пока нет
- Formulaire SUP SuitesДокумент2 страницыFormulaire SUP Suiteshala shooowОценок пока нет
- Cours Systemes de Transmission de MouvementДокумент5 страницCours Systemes de Transmission de MouvementdjalikadjouОценок пока нет
- Cours AngularДокумент44 страницыCours Angularyosri grira100% (1)
- 0-Rappel Langage SQLДокумент4 страницы0-Rappel Langage SQLaminehosnyОценок пока нет
- cm2 Exercices SymetrieДокумент4 страницыcm2 Exercices Symetriegjx7qcfwmyОценок пока нет
- Mem Corr AndriantavyДокумент66 страницMem Corr AndriantavyWael TrabelsiОценок пока нет
- Cours Probabilités (Chapitre 1 - Analyse Combinatoire)Документ41 страницаCours Probabilités (Chapitre 1 - Analyse Combinatoire)Khadija Dia100% (1)
- ParetoДокумент13 страницParetoIkram El GhazouaniОценок пока нет