Вам также может понравиться
- Tarea 2. Cuadro SinopticoДокумент4 страницыTarea 2. Cuadro SinopticoIsac Uc MooОценок пока нет
- T2. Microbiología de La Carne. Uc, IsacДокумент2 страницыT2. Microbiología de La Carne. Uc, IsacIsac Uc MooОценок пока нет
- Cuadro Comparativo Del Desarrollo Economico & Crecimiento EconomicoДокумент4 страницыCuadro Comparativo Del Desarrollo Economico & Crecimiento EconomicoIsac Uc MooОценок пока нет
- Repaso de Biología U5Документ4 страницыRepaso de Biología U5Isac Uc MooОценок пока нет
- T2. Microbiología de La Leche y Los Productos Lácteos. Uc, IsacДокумент3 страницыT2. Microbiología de La Leche y Los Productos Lácteos. Uc, IsacIsac Uc MooОценок пока нет
- Linea de TiempoДокумент1 страницаLinea de TiempoIsac Uc MooОценок пока нет
- Exposición 3 DSДокумент5 страницExposición 3 DSIsac Uc MooОценок пока нет
- T2. Microbiología de Productos Cárnicos. Uc, IsacДокумент2 страницыT2. Microbiología de Productos Cárnicos. Uc, IsacIsac Uc MooОценок пока нет
- U2. ETA. Toxoplasma Gondii y Bacillus CereusДокумент12 страницU2. ETA. Toxoplasma Gondii y Bacillus CereusIsac Uc MooОценок пока нет
- Expos 3Документ2 страницыExpos 3Isac Uc MooОценок пока нет
- Reporte U4.1Документ4 страницыReporte U4.1Isac Uc MooОценок пока нет
- Exposición de Desarrollo SustentableДокумент1 страницаExposición de Desarrollo SustentableIsac Uc MooОценок пока нет
- Formulario de Transformaciones LinealesДокумент6 страницFormulario de Transformaciones LinealesIsac Uc Moo100% (1)
- Composición Química de Los Seres VivosДокумент3 страницыComposición Química de Los Seres VivosIsac Uc MooОценок пока нет
- Formulario de Matrices & DeterminantesДокумент13 страницFormulario de Matrices & DeterminantesIsac Uc Moo80% (5)
- Formulario de Numero ComplejosДокумент2 страницыFormulario de Numero ComplejosIsac Uc MooОценок пока нет
- Formulario de Espacios VectorialesДокумент12 страницFormulario de Espacios VectorialesIsac Uc Moo100% (1)
- Formulario de Sistemas de Ecuaciones LinealesДокумент11 страницFormulario de Sistemas de Ecuaciones LinealesIsac Uc MooОценок пока нет
- Tecnológico Nacional De México Calidad DocumentaciónДокумент3 страницыTecnológico Nacional De México Calidad DocumentaciónIsac Uc MooОценок пока нет
- REFRENCIASДокумент2 страницыREFRENCIASIsac Uc MooОценок пока нет
- Resumen Del Tema 2 Parte 2Документ3 страницыResumen Del Tema 2 Parte 2Isac Uc MooОценок пока нет
- Tarea 6. Trabajo Final & EvaluaciónДокумент11 страницTarea 6. Trabajo Final & EvaluaciónIsac Uc MooОценок пока нет
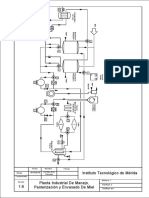
- Diagrama de ProcesoДокумент1 страницаDiagrama de ProcesoIsac Uc MooОценок пока нет
- Tarea 5. Trabajo Final & Evaluación Del Tema 7 PDFДокумент9 страницTarea 5. Trabajo Final & Evaluación Del Tema 7 PDFIsac Uc MooОценок пока нет
- Hexofuranosas de La Serie DДокумент4 страницыHexofuranosas de La Serie DIsac Uc MooОценок пока нет
- EstequiometriaДокумент20 страницEstequiometriaIsac Uc MooОценок пока нет
- Resumen Del Tema 2 Parte 3 & Tema 3Документ7 страницResumen Del Tema 2 Parte 3 & Tema 3Isac Uc MooОценок пока нет
- Linea de TiempoДокумент1 страницаLinea de TiempoIsac Uc MooОценок пока нет
- Guia de Matematica 6Документ7 страницGuia de Matematica 6gerson7figueroaОценок пока нет
- Conservatorio de Música de Buenos Aires: Violoncello CIIДокумент1 страницаConservatorio de Música de Buenos Aires: Violoncello CIIOrquesta Tipica Caleta OliviaОценок пока нет
- Determinacion Del Error de IndicacionДокумент4 страницыDeterminacion Del Error de IndicacionJonathan Steven B RamirezОценок пока нет
- OptotiposДокумент8 страницOptotiposgenesis holguinОценок пока нет
- Anexo1 - IGA PrimariaДокумент12 страницAnexo1 - IGA PrimariaJacquelinLinettChipanaMamaniОценок пока нет
- Preescritura nivel prekinderДокумент49 страницPreescritura nivel prekinderjessica vilches gonzalezОценок пока нет
- Autoridades responsables del proceso de contrataciónДокумент8 страницAutoridades responsables del proceso de contrataciónVicvicXGonzxОценок пока нет
- Tarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-AДокумент8 страницTarea Académica 1 - Ensayo Sobre La Aplicación de Las TIC en El Proceso de E-AMisheyraLucayОценок пока нет
- Placenta PreviaДокумент70 страницPlacenta PreviaEstherОценок пока нет
- Ficha de Aplicacion - Julio 3 A SДокумент120 страницFicha de Aplicacion - Julio 3 A Sgerald augusto lopez bardales100% (2)
- Impacto en La Salud Mental Por El Derrame de Petroleo en Las Costas Del Peru 2022Документ8 страницImpacto en La Salud Mental Por El Derrame de Petroleo en Las Costas Del Peru 2022ELIAS ENOC SAMANEZ GOMEROОценок пока нет
- Prótesis parcial removible: clases, componentes y retenedoresДокумент10 страницPrótesis parcial removible: clases, componentes y retenedoreskoizorabigОценок пока нет
- Cosmovisión de Los Pueblos de GuatemalaДокумент3 страницыCosmovisión de Los Pueblos de Guatemalaleo081989Оценок пока нет
- Muestreo y Analisis de DatosДокумент6 страницMuestreo y Analisis de DatosCruces OscarОценок пока нет
- PRE KINDER. 28 Sept Al 2 OctДокумент7 страницPRE KINDER. 28 Sept Al 2 OctDenisse MarinОценок пока нет
- Técnicas - Trabajo de EquipoДокумент17 страницTécnicas - Trabajo de EquipoAstrip100% (15)
- 43AA73.-Desarrollo de Habilidades Profesionales 1-G1AL (G1AM) - CF1-TE-SP-JAIME PULIDO ALVARADOДокумент4 страницы43AA73.-Desarrollo de Habilidades Profesionales 1-G1AL (G1AM) - CF1-TE-SP-JAIME PULIDO ALVARADOMatias PorrasОценок пока нет
- Censo Electores Madrid 1858Документ30 страницCenso Electores Madrid 1858Felipe Diez100% (1)
- Eje LocoДокумент1 страницаEje LocoAngelo Torres TerrerosОценок пока нет
- LOGISTICAДокумент19 страницLOGISTICAfiorella carbajalОценок пока нет
- Economia Politica CuestionarioДокумент6 страницEconomia Politica CuestionarioNisa Nelly LudeñoОценок пока нет
- Negociación y Contratación InternacionalДокумент3 страницыNegociación y Contratación Internacionalyara espinozaОценок пока нет
- Manual Tecnico SISTEMA DE ASMINISTRACIÓN 2Документ26 страницManual Tecnico SISTEMA DE ASMINISTRACIÓN 2Marco Antonio Martinez PacoОценок пока нет
- Tics Grau Antabamba AymaraesДокумент232 страницыTics Grau Antabamba AymaraesEdwin Flores RojasОценок пока нет
- Procesamiento e interpretación de SEVs utilizando softwareДокумент7 страницProcesamiento e interpretación de SEVs utilizando softwarePaul SoriaОценок пока нет
- Técnicas Analíticas Instrumentales IДокумент6 страницTécnicas Analíticas Instrumentales IJoelОценок пока нет
- Examen Diagnostico 3Документ17 страницExamen Diagnostico 3Nahomi Samantha Silva Barrera100% (1)
- YAN-HS-STA-021 Control de Materiales y Químicos Peligrosos V 15Документ14 страницYAN-HS-STA-021 Control de Materiales y Químicos Peligrosos V 15ivan saldañaОценок пока нет
- Itse Instrucciones para Llenado Del Formato DD - JJ .Документ3 страницыItse Instrucciones para Llenado Del Formato DD - JJ .Carlos GuerreroОценок пока нет
- Ensayo Consumo Comida ChatarraДокумент4 страницыEnsayo Consumo Comida ChatarraDora Samayoa Cavallini0% (2)