Вам также может понравиться
- Los transportes en la ingeniería industria: TeoríaОт EverandLos transportes en la ingeniería industria: TeoríaРейтинг: 5 из 5 звезд5/5 (2)
- Diseño de Pavimento Rigido para La Urbanización Caballero Gongora, Municipio de Honda-TolimaДокумент94 страницыDiseño de Pavimento Rigido para La Urbanización Caballero Gongora, Municipio de Honda-Tolimatorres8006Оценок пока нет
- Proyecto - Formulación Del Plan de Saneamiento Básico Universidad Libre Sede Bosque PopularДокумент134 страницыProyecto - Formulación Del Plan de Saneamiento Básico Universidad Libre Sede Bosque PopularJohanna MolinaОценок пока нет
- Vargas Buitrago Camila 2019Документ93 страницыVargas Buitrago Camila 2019brayebranОценок пока нет
- Evaluación Del Funcionamiento de Un Prototipo A Escala de LaДокумент151 страницаEvaluación Del Funcionamiento de Un Prototipo A Escala de LaMarco Soraluz CubasОценок пока нет
- TFMAitana Díaz Suárez RUOДокумент90 страницTFMAitana Díaz Suárez RUOCarlos CastilloОценок пока нет
- Tesis de GradoДокумент63 страницыTesis de GradoGonzaloQuellcaMamaniОценок пока нет
- Monografía, Propuesta de Un Sistema Fotovoltaico para Consumo Eléctrico en El Municipio de Quebra PDFДокумент92 страницыMonografía, Propuesta de Un Sistema Fotovoltaico para Consumo Eléctrico en El Municipio de Quebra PDFSergio Oviedo CastroОценок пока нет
- Manual de Implementación Fotovoltaica PDFДокумент76 страницManual de Implementación Fotovoltaica PDFFabian RamirezОценок пока нет
- Universidad Tecnológica Equinoccial: Facultad de Ciencias de La Ingeniería Carrera de Ingeniería AutomotrizДокумент158 страницUniversidad Tecnológica Equinoccial: Facultad de Ciencias de La Ingeniería Carrera de Ingeniería AutomotrizSalvador Ramirez PachecoОценок пока нет
- Análisis Diseño Óptimo Rejillas ConcretopermeableДокумент89 страницAnálisis Diseño Óptimo Rejillas ConcretopermeableAnonymous ouVCCOzpmОценок пока нет
- Implementación de Una Metodología para La Estimación de Costos de Soldadura y Consumibles Con El Proceso Gmaw en Las Dos - 1Документ88 страницImplementación de Una Metodología para La Estimación de Costos de Soldadura y Consumibles Con El Proceso Gmaw en Las Dos - 1flores floresОценок пока нет
- Metodología para El Diseño de Una Línea de Transmisión de 220 KV en El Perú, Según Consideraciones Nacionales e InternacionalesДокумент125 страницMetodología para El Diseño de Una Línea de Transmisión de 220 KV en El Perú, Según Consideraciones Nacionales e InternacionalesMadnessia OficialОценок пока нет
- Gutierrez Farfan Jhonfaber-2017-Desarrollo e Implementación de Un Equipo Medidor de EnergíaДокумент85 страницGutierrez Farfan Jhonfaber-2017-Desarrollo e Implementación de Un Equipo Medidor de EnergíaMario Hilari CalderonОценок пока нет
- Actualizacion de La Cartilla Modelos de Puentes de Plca, Viga y Alcantarillas de Cajon de 1988 para Superestructuras Con Luces Entre 10 y 20 Metros PDFДокумент179 страницActualizacion de La Cartilla Modelos de Puentes de Plca, Viga y Alcantarillas de Cajon de 1988 para Superestructuras Con Luces Entre 10 y 20 Metros PDFPrado Pérez RosalíaОценок пока нет
- Diseño de Una Propuesta para La Reducción de Los Tiempos de Entrega en Indumetálicas Carz Empleando Herramientas de Lean ManufacturingДокумент94 страницыDiseño de Una Propuesta para La Reducción de Los Tiempos de Entrega en Indumetálicas Carz Empleando Herramientas de Lean ManufacturingELIEZER ZURISADAI MARTINEZ DE LA TRINIDADОценок пока нет
- Novoa Peñaloza John Edison 2019Документ98 страницNovoa Peñaloza John Edison 2019Asael González LópezОценок пока нет
- NovoaAndres2013 PDFДокумент256 страницNovoaAndres2013 PDFjuan david ricaurteОценок пока нет
- Revisar Revisor 20230515084313Документ66 страницRevisar Revisor 20230515084313William QuisbertОценок пока нет
- Trabajo 4 Final FinaДокумент88 страницTrabajo 4 Final FinaKari IngUrОценок пока нет
- Caceres Diego 2018 PDFДокумент169 страницCaceres Diego 2018 PDFAronChoqueChauca0% (1)
- Tesis Red Cloacal La Calera, Cordoba, Argentina. Vega, Cesar GabrielДокумент94 страницыTesis Red Cloacal La Calera, Cordoba, Argentina. Vega, Cesar GabrielGabriel VegaОценок пока нет
- SH1. Estudio Hidrológico e Hidraulico Puente JaifeДокумент112 страницSH1. Estudio Hidrológico e Hidraulico Puente JaifeLilianMAОценок пока нет
- Proyecto de Grado "Aplicación de Nuevas Estrategias P Ara Perforar Con Arreglo de Fondo" (Campo Propuesto Tatarenda Pozo (TTR - X9)Документ191 страницаProyecto de Grado "Aplicación de Nuevas Estrategias P Ara Perforar Con Arreglo de Fondo" (Campo Propuesto Tatarenda Pozo (TTR - X9)Ronald Pinto MamaniОценок пока нет
- PFC Villar Lagos 2017Документ156 страницPFC Villar Lagos 2017Carlos LlfОценок пока нет
- Rodríguez Lombana Johans Manuel 2017Документ76 страницRodríguez Lombana Johans Manuel 2017Mervin HernandezОценок пока нет
- Tesis MBRДокумент88 страницTesis MBRcarolina garciaОценок пока нет
- Formulación de Estudio TécnicoДокумент288 страницFormulación de Estudio TécnicoVladimir AntonioОценок пока нет
- Material ProenfarДокумент176 страницMaterial ProenfaranetrtuidОценок пока нет
- UPB - Análisis de Obras Civiles en La Línea de Transmisión 230 KV San Jose - SantivañezДокумент249 страницUPB - Análisis de Obras Civiles en La Línea de Transmisión 230 KV San Jose - SantivañezFernando Alexander Torres FerrufinoОценок пока нет
- Diseño e Implementación de Un Sistema de Enfriamiento para Molinos de Bolas PDFДокумент101 страницаDiseño e Implementación de Un Sistema de Enfriamiento para Molinos de Bolas PDFRenzo J. Catacora SОценок пока нет
- Propuesta de Mejoramiento de Las Operaciones en La Planta de Tratamiento de Agua Residual en El Municipio de La Calera (Cundinamarca) PDFДокумент62 страницыPropuesta de Mejoramiento de Las Operaciones en La Planta de Tratamiento de Agua Residual en El Municipio de La Calera (Cundinamarca) PDFCamila BeltranОценок пока нет
- Trabajo de Grado Acueducto PDFДокумент60 страницTrabajo de Grado Acueducto PDFGARRY MICHELОценок пока нет
- 13puente Analisis PDFДокумент189 страниц13puente Analisis PDFAnonymous mlmnk1MОценок пока нет
- TMCT 0021CДокумент64 страницыTMCT 0021COskar LancherosОценок пока нет
- INFORME GRANULOMETRIA - Tamiz - Hidrometro - limitesplasticosMEC. SUELOSДокумент45 страницINFORME GRANULOMETRIA - Tamiz - Hidrometro - limitesplasticosMEC. SUELOSWILLIAM CAMILO PIZO PAJOYОценок пока нет
- Manual de Operaciones Refineria, Procesos y Componentes Ocr PDFДокумент131 страницаManual de Operaciones Refineria, Procesos y Componentes Ocr PDFcristhian0% (1)
- T 532 T315 2014Документ155 страницT 532 T315 2014Feliciano KalaОценок пока нет
- Manual Tecnico Acueductos VillavicencioДокумент101 страницаManual Tecnico Acueductos VillavicencioALEX CERTUCHE MUÑOZОценок пока нет
- Muñoz Cano Ivan Camilo 2018Документ90 страницMuñoz Cano Ivan Camilo 2018Glenis CastellarОценок пока нет
- Norma NSR 10Документ78 страницNorma NSR 10Anonymous ozaLzF30i100% (1)
- Trabajo de Grado ParatebuenoДокумент106 страницTrabajo de Grado ParatebuenoDiana Valentina CostasОценок пока нет
- Diseño e Implementación de Prototipo para Sistema Automatizado de Recolección y Extracción de CodornazaДокумент73 страницыDiseño e Implementación de Prototipo para Sistema Automatizado de Recolección y Extracción de CodornazaDario Likes SurfingОценок пока нет
- Dia HuachocolpaДокумент185 страницDia HuachocolpaNoe Pilco isuizaОценок пока нет
- Narváez DarwinДокумент95 страницNarváez DarwinAcciones y Gestiones Eléctricas S.A.S.Оценок пока нет
- PROYECTO PavimentosДокумент113 страницPROYECTO PavimentosOmar Lozano FernandezОценок пока нет
- Análisis de Factor de Carga y de DiversidadДокумент299 страницAnálisis de Factor de Carga y de Diversidaddjlarez2000100% (1)
- Estudio de Las Principales Canteras Abastecedoras de Agregados para Un Optimo Diseño de Mezcla en PDFДокумент119 страницEstudio de Las Principales Canteras Abastecedoras de Agregados para Un Optimo Diseño de Mezcla en PDFMIGUEL135100% (1)
- PFC Juan Francisco Rodriguez GarciaДокумент325 страницPFC Juan Francisco Rodriguez GarciaNestor HidalgoОценок пока нет
- Tesis Reologia PDFДокумент211 страницTesis Reologia PDFAntony Albines LozanoОценок пока нет
- Modelo de Contratacion de Mantenimiento de Tanques en Ecopetrol SaДокумент106 страницModelo de Contratacion de Mantenimiento de Tanques en Ecopetrol SajairoramosheОценок пока нет
- Tesis MecánicaДокумент146 страницTesis MecánicaJuan Carlos Lasluisa NaranjoОценок пока нет
- Trabajo de Grado - Wilmer Y Rojas 505632Документ82 страницыTrabajo de Grado - Wilmer Y Rojas 505632Cristhian RodríguezОценок пока нет
- Informe Practica Jessica Paola AzaДокумент36 страницInforme Practica Jessica Paola AzaPaulina PuelloОценок пока нет
- Estudio de Morteros de La POrtada de La Catedral de CuscoДокумент165 страницEstudio de Morteros de La POrtada de La Catedral de CuscoRuffo Belisario Sallo CubaОценок пока нет
- Trabajo de Grado-060Документ169 страницTrabajo de Grado-060luis eduardo0% (1)
- 2021 SergiocruzДокумент75 страниц2021 Sergiocruzmaj3stickОценок пока нет
- 4P Com NJ 10 21Документ5 страниц4P Com NJ 10 21Jhordi NuñezОценок пока нет
- Muestreo: Estadística Inferencial Mgtr. Janet Josco MendozaДокумент23 страницыMuestreo: Estadística Inferencial Mgtr. Janet Josco MendozaJose CevallosОценок пока нет
- Muestreo: Estadística Inferencial Mgtr. Janet Josco MendozaДокумент23 страницыMuestreo: Estadística Inferencial Mgtr. Janet Josco MendozaJose CevallosОценок пока нет
- Objetiv OsДокумент1 страницаObjetiv OsJhordi NuñezОценок пока нет
- Trabajo de Grado - Alejandro Enrique Martínez VélezДокумент94 страницыTrabajo de Grado - Alejandro Enrique Martínez VélezJhordi NuñezОценок пока нет
- PA02 Validado COДокумент8 страницPA02 Validado COJhordi NuñezОценок пока нет
- Monografia - Precalentador de AireДокумент15 страницMonografia - Precalentador de AireJhordi NuñezОценок пока нет
- OBSERVACIONES, Conclusiones y RecomendacionesДокумент1 страницаOBSERVACIONES, Conclusiones y RecomendacionesJhordi NuñezОценок пока нет
- Investigacion de Operaciones Abel Martin Vargas Garcia Pa1 2021Документ13 страницInvestigacion de Operaciones Abel Martin Vargas Garcia Pa1 2021Jhordi NuñezОценок пока нет
- Producto Academico 3 - Derecho Administrativo 2 - 2021 10BДокумент10 страницProducto Academico 3 - Derecho Administrativo 2 - 2021 10BJhordi NuñezОценок пока нет
- Trifasicos DesbalanceadosДокумент21 страницаTrifasicos DesbalanceadosJhordi NuñezОценок пока нет
- Producto Academico 2.vfДокумент5 страницProducto Academico 2.vfJhordi Nuñez100% (1)
- Emprendimiento e Innovación - P3 2021-10BДокумент2 страницыEmprendimiento e Innovación - P3 2021-10BJhordi NuñezОценок пока нет
- INFORME3Документ24 страницыINFORME3Jhordi NuñezОценок пока нет
- Laboratorio 7 Grupo 8Документ22 страницыLaboratorio 7 Grupo 8Jhordi NuñezОценок пока нет
- Alvaro Charris Informe 8 Transistores de Efecto de Campo JFETДокумент6 страницAlvaro Charris Informe 8 Transistores de Efecto de Campo JFETJhordi NuñezОценок пока нет
- Informe Final N 3 El Transistor de Efecto de Campo Laboratorio de Electronica IДокумент32 страницыInforme Final N 3 El Transistor de Efecto de Campo Laboratorio de Electronica IJhordi NuñezОценок пока нет
- 4P Com NJ 13 21Документ3 страницы4P Com NJ 13 21Jhordi NuñezОценок пока нет
- PA3 TAREA - PlantillaДокумент5 страницPA3 TAREA - PlantillaJhordi NuñezОценок пока нет
- PDF Como Influye El Emprendimiento y La Innovacion en El Desarrollo Economico DDДокумент3 страницыPDF Como Influye El Emprendimiento y La Innovacion en El Desarrollo Economico DDJhordi NuñezОценок пока нет
- Avance de Monografía Grupo 4Документ27 страницAvance de Monografía Grupo 4Jhordi NuñezОценок пока нет
- Producto Académico 03Документ4 страницыProducto Académico 03Jhordi NuñezОценок пока нет
- Pa1 202110 IioДокумент10 страницPa1 202110 IioJhordi NuñezОценок пока нет
- P.C. 4 Del 2107-1Документ6 страницP.C. 4 Del 2107-1Jhordi NuñezОценок пока нет
- P.C 4 Del 2016 2Документ6 страницP.C 4 Del 2016 2jeanОценок пока нет
- Producto Académico N 1 (Entregable)Документ1 страницаProducto Académico N 1 (Entregable)Jhordi NuñezОценок пока нет
- Emprendimiento e Innovación - p1 2019-00Документ1 страницаEmprendimiento e Innovación - p1 2019-00Jhordi NuñezОценок пока нет
- Informe 1-Laboratorio de Circuitos 2Документ58 страницInforme 1-Laboratorio de Circuitos 2Jhordi NuñezОценок пока нет
- Informe 1-Laboratorio de Circuitos 2Документ58 страницInforme 1-Laboratorio de Circuitos 2Jhordi NuñezОценок пока нет
- MB536 EF 2017 1 ImpresionДокумент6 страницMB536 EF 2017 1 ImpresionFernando Paez MendizabalОценок пока нет
- A C T AДокумент2 страницыA C T Achristian andinoОценок пока нет
- Copia de Pra-For-34 Centros Educativos Mural 1Документ6 страницCopia de Pra-For-34 Centros Educativos Mural 1Stefany RodriguezОценок пока нет
- Ensayo (El Azul Entre El Cielo y El Agua)Документ4 страницыEnsayo (El Azul Entre El Cielo y El Agua)Johannä TorresОценок пока нет
- Reporte para Notificación Plan de Mejoramiento 3er Trimestre Básica Secundaria y MediaДокумент29 страницReporte para Notificación Plan de Mejoramiento 3er Trimestre Básica Secundaria y MediaJuan Pablo RojasОценок пока нет
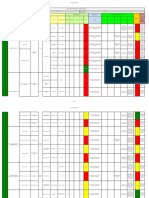
- Iper MontajeДокумент7 страницIper MontajeGabriela Figueroa AguirreОценок пока нет
- Ficha Médica 2023Документ1 страницаFicha Médica 2023Claudia PazОценок пока нет
- Ella Si Que Estaba - Monica BenitezДокумент140 страницElla Si Que Estaba - Monica BenitezBEA18Оценок пока нет
- Informe DiagnósticoRecepto R SANANDRESДокумент7 страницInforme DiagnósticoRecepto R SANANDRESFERNNEY SANTIAGO GARCIA SALAZARОценок пока нет
- Plantillas para DiversificarДокумент4 страницыPlantillas para DiversificarRony Flores AlejandriaОценок пока нет
- Aves Endémicas de MéxicoДокумент3 страницыAves Endémicas de MéxicoSandy CárdenasОценок пока нет
- Funciones AdministrativasДокумент6 страницFunciones AdministrativasHenry CabnalОценок пока нет
- Manual Tecnico para Diseño SE RuralesДокумент169 страницManual Tecnico para Diseño SE RuralesBetto MtОценок пока нет
- Natalia Barrozo (2017) - EDUCACION, DISCAPACIDAD Y RURALIDAD ANALISIS DEL EJERCICIO AL DERECHO A LA EDUCACION DE PERSONAS CON DISCAPACIDAD (..)Документ13 страницNatalia Barrozo (2017) - EDUCACION, DISCAPACIDAD Y RURALIDAD ANALISIS DEL EJERCICIO AL DERECHO A LA EDUCACION DE PERSONAS CON DISCAPACIDAD (..)Ariela Di PizioОценок пока нет
- Ejercicios Recomendados - Capítulo 2Документ5 страницEjercicios Recomendados - Capítulo 2El Uri100% (1)
- Mapa Conceptual CultivosДокумент1 страницаMapa Conceptual CultivosGema Bernal100% (1)
- BoyerДокумент4 страницыBoyerMelissa Morales Toledo0% (1)
- Xdoc - MX La Fuga de La Rima LXXV Revista de Filologia EspaolaДокумент10 страницXdoc - MX La Fuga de La Rima LXXV Revista de Filologia EspaolaDanna PachecoОценок пока нет
- Cartilla Dif ApzjeДокумент7 страницCartilla Dif ApzjeJoel DavidОценок пока нет
- Jesse y JoyДокумент12 страницJesse y JoyErika BermudezОценок пока нет
- Características de La Literatura China PoesíaДокумент1 страницаCaracterísticas de La Literatura China PoesíaFranco Raider AldairОценок пока нет
- 6ta Semana HLДокумент7 страниц6ta Semana HLERICK LUQUEОценок пока нет
- Clase 9 y 10. Operadores Lógicos. Reglas de InferenciaДокумент92 страницыClase 9 y 10. Operadores Lógicos. Reglas de InferenciaMia AvegnoОценок пока нет
- LIBRO Biología Evolutiva de La Niñez/ Autora Ana FazДокумент423 страницыLIBRO Biología Evolutiva de La Niñez/ Autora Ana FazMaria JuarezОценок пока нет
- Puente-Flotante (1) (Autoguardado)Документ7 страницPuente-Flotante (1) (Autoguardado)Miguel Angel Romero MoralesОценок пока нет
- Oficio de Invitacion - San Juan TangumiДокумент3 страницыOficio de Invitacion - San Juan TangumiRichard Nuñez AcostaОценок пока нет
- Examen Segundo Parcial T TPM Y RCCMДокумент2 страницыExamen Segundo Parcial T TPM Y RCCMmike guerreroОценок пока нет
- Las Islas Nuevas BombalДокумент23 страницыLas Islas Nuevas BombalBrenda Carlos de AndradeОценок пока нет
- Manual Aspel ProdДокумент10 страницManual Aspel ProdSara Lewis100% (1)
- Modelos para La MedicionДокумент10 страницModelos para La MedicionMaria Del Carmen GAОценок пока нет
- Cartas Evidencia MiladysДокумент6 страницCartas Evidencia Miladysrecepcion chavanorteОценок пока нет