Вам также может понравиться
- Department Dept. Code Course Title Course Code Pre-Requisite(s) Credit HoursДокумент2 страницыDepartment Dept. Code Course Title Course Code Pre-Requisite(s) Credit HoursShahzad AsifОценок пока нет
- UFMFMA-15-2 Signal Processing and Circuits Module GuideДокумент4 страницыUFMFMA-15-2 Signal Processing and Circuits Module GuideNuwan AsankaОценок пока нет
- Electrical Equipment SyllabusДокумент5 страницElectrical Equipment Syllabusewan ko0% (2)
- CSE SyllabusДокумент22 страницыCSE SyllabusTanzidul Islam50% (2)
- Syl Ee300Документ4 страницыSyl Ee300KhalidJ.OweisОценок пока нет
- Signal and Systems - CLOДокумент3 страницыSignal and Systems - CLOHamza AyazОценок пока нет
- Course Specification - EEE-3501Документ4 страницыCourse Specification - EEE-3501Tanzim MushtaryОценок пока нет
- CIS Control Technology-Theory-Spring-2021Документ6 страницCIS Control Technology-Theory-Spring-2021mishal shakeelОценок пока нет
- EE561 OBEcourseoutline 2019 20Документ4 страницыEE561 OBEcourseoutline 2019 20talha manzoorОценок пока нет
- Department of Electrical Engineering Course Descriptive FileДокумент8 страницDepartment of Electrical Engineering Course Descriptive FiletarhantasОценок пока нет
- Course Plan and The Evaluation Plan: Signals & SystemsДокумент2 страницыCourse Plan and The Evaluation Plan: Signals & Systemsanon_401388365Оценок пока нет
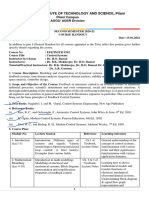
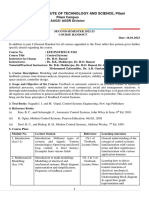
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionДокумент3 страницыBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionVibgyor SinghviОценок пока нет
- 6 Semester: Institute of Engineering & ManagementДокумент40 страниц6 Semester: Institute of Engineering & ManagementManohar PОценок пока нет
- Lec02 Math Foundation1Документ5 страницLec02 Math Foundation1Adit 0110Оценок пока нет
- EE 340 Control Systems: Schedule SemesterДокумент3 страницыEE 340 Control Systems: Schedule Semesteranon_897005027Оценок пока нет
- Signals Systems Course Outline BE-IV Spring 2024Документ7 страницSignals Systems Course Outline BE-IV Spring 2024thezayneticОценок пока нет
- DC Machinery Lab FinalДокумент4 страницыDC Machinery Lab FinalBryan CustodioОценок пока нет
- 2signals and System AnalysisДокумент4 страницы2signals and System AnalysisGebru GurmessaОценок пока нет
- ELE 211 Fall10 SyllabiДокумент4 страницыELE 211 Fall10 Syllabiahmadbashiri5135Оценок пока нет
- Mod Control System - Course - OutlineДокумент4 страницыMod Control System - Course - OutlineTamrat ZewdeОценок пока нет
- Switch Gear and ProtectionДокумент15 страницSwitch Gear and ProtectionLaxmiKrishnaОценок пока нет
- CONSYSДокумент3 страницыCONSYSADITYA MATHURОценок пока нет
- EE228 Learning Objectives - Midterm1Документ1 страницаEE228 Learning Objectives - Midterm1Gustavo Alejandro NaranjoОценок пока нет
- EE-371 Linear Control Systems First Day HandoutДокумент4 страницыEE-371 Linear Control Systems First Day HandoutMaham AslamОценок пока нет
- Cmos Analog Ic Design Course Plan NewДокумент9 страницCmos Analog Ic Design Course Plan Newjim2001Оценок пока нет
- Gujarat Technological University: W.E.F. AY 2018-19Документ3 страницыGujarat Technological University: W.E.F. AY 2018-19Alok MauryaОценок пока нет
- ELE2103 Linear Systems and Control: Introductory BookДокумент39 страницELE2103 Linear Systems and Control: Introductory BookkaneОценок пока нет
- Digital Signal Processing (8SRN4/7IT01) : Unit Wise Course ContentsДокумент3 страницыDigital Signal Processing (8SRN4/7IT01) : Unit Wise Course ContentsSyrd MdeОценок пока нет
- Course Plan - MATH-101 - MATH-IДокумент4 страницыCourse Plan - MATH-101 - MATH-I8356shaheerОценок пока нет
- Modeling and SimulationДокумент29 страницModeling and SimulationMuhammad Hammad Javed IqbalОценок пока нет
- Institution Mission Statement Institution Vision Statement: Energy Conversion (Lec)Документ5 страницInstitution Mission Statement Institution Vision Statement: Energy Conversion (Lec)yolopОценок пока нет
- EE-232 Signals and Systems-2Документ6 страницEE-232 Signals and Systems-2Haris GhafoorОценок пока нет
- Poles Zeros and System Response Extra Notes Nise 1Документ5 страницPoles Zeros and System Response Extra Notes Nise 1Ian UdhiliОценок пока нет
- Automatic Control Engineering Computer/ Electronics/ MechatronicsДокумент3 страницыAutomatic Control Engineering Computer/ Electronics/ Mechatronicsadel nabhanОценок пока нет
- ECE 126 Introduction To Analog IC DesignДокумент5 страницECE 126 Introduction To Analog IC DesignBernard EbarleОценок пока нет
- BSI Complex Variables Cloplos, Fall 2020Документ5 страницBSI Complex Variables Cloplos, Fall 2020Ahmar KhanОценок пока нет
- EE 340 Control Systems: Schedule Course Type, SemesterДокумент5 страницEE 340 Control Systems: Schedule Course Type, SemesterArbab HaiderОценок пока нет
- Els2204 Sinsis 1718 CepДокумент7 страницEls2204 Sinsis 1718 CepChristian MarpaungОценок пока нет
- Calclus Maths Course OutlineДокумент2 страницыCalclus Maths Course OutlineMburu KaranjaОценок пока нет
- CS SyllabusДокумент2 страницыCS SyllabusEEE ACEECОценок пока нет
- ECE 3050: Signals and Systems: Course DescriptionДокумент4 страницыECE 3050: Signals and Systems: Course Descriptionemadaddin alezzaniОценок пока нет
- Course OutlineДокумент4 страницыCourse OutlineShumaila NaveedОценок пока нет
- Advanced Control Systems SyllabusДокумент2 страницыAdvanced Control Systems SyllabusMulu GirmayОценок пока нет
- Signal and System: Introduction To Signals and SystemsДокумент2 страницыSignal and System: Introduction To Signals and SystemsAnonymous HyOfbJ6Оценок пока нет
- COE0005, Chemistry For Engineers 1Документ8 страницCOE0005, Chemistry For Engineers 1Gheoff RicareОценок пока нет
- 14EI406 CO & LOS - Signals and SystemsДокумент5 страниц14EI406 CO & LOS - Signals and SystemsbvkswamyОценок пока нет
- Experimental Techniques in Structural Engineering 01ST1208 (LC)Документ2 страницыExperimental Techniques in Structural Engineering 01ST1208 (LC)VenkatesanОценок пока нет
- TH THДокумент2 страницыTH THranjani093Оценок пока нет
- EE352: Linear Control Systems Syllabus: 1 Course DescriptionДокумент2 страницыEE352: Linear Control Systems Syllabus: 1 Course DescriptionYassine DjillaliОценок пока нет
- EDA OBE Syllabus 2019Документ9 страницEDA OBE Syllabus 2019King Dominic JavierОценок пока нет
- Lect. No. Topic Learning Object(s) Ref. To Text Book/ Class NotesДокумент2 страницыLect. No. Topic Learning Object(s) Ref. To Text Book/ Class Notessaurjyesh nayakОценок пока нет
- IC6501 SCAD MSM by WWW - Learnengineering.inДокумент223 страницыIC6501 SCAD MSM by WWW - Learnengineering.inKarthi BEОценок пока нет
- Course Syllabus: United International UniversityДокумент6 страницCourse Syllabus: United International UniversityZaid Bin Abdul MalekОценок пока нет
- Dynamic System Modeling and Control Hugh Jack 5621581687b49Документ8 страницDynamic System Modeling and Control Hugh Jack 5621581687b49Mauricio Ramirez RojasОценок пока нет
- 3.syllabus RubricsДокумент5 страниц3.syllabus RubricsSomesh MuruganОценок пока нет
- CHE 0222 - Momentum Transfer (SYLLABUS)Документ7 страницCHE 0222 - Momentum Transfer (SYLLABUS)Vjion BeloОценок пока нет
- CEP - LCS Spring 2022Документ4 страницыCEP - LCS Spring 2022Muhammad ZeeshanОценок пока нет
- CHE101A F2020 Lec1-Annotated PDFДокумент35 страницCHE101A F2020 Lec1-Annotated PDFcamiОценок пока нет
- IC301 Control Engineering-IДокумент3 страницыIC301 Control Engineering-IAKSHAY KRISHNA K RОценок пока нет
- Control Systems III Course Guide 2016Документ11 страницControl Systems III Course Guide 2016John LionelОценок пока нет
- Three Views of Logic: Mathematics, Philosophy, and Computer ScienceОт EverandThree Views of Logic: Mathematics, Philosophy, and Computer ScienceОценок пока нет
- Credit For Employment FeedbackДокумент2 страницыCredit For Employment FeedbackJojo CansinoОценок пока нет
- LKL LFSDSDDFSFDDFDFSFDSZZZDДокумент23 страницыLKL LFSDSDDFSFDDFDFSFDSZZZDJojo CansinoОценок пока нет
- Sinantomas - Kawaling PinoyДокумент2 страницыSinantomas - Kawaling PinoyJojo CansinoОценок пока нет
- Chapter 8Документ20 страницChapter 8Jojo CansinoОценок пока нет
- Itwp103/Itwa133 Web Programming Midterm Lab Practical ExamДокумент1 страницаItwp103/Itwa133 Web Programming Midterm Lab Practical ExamJojo CansinoОценок пока нет
- Door - Goat - WolfДокумент2 страницыDoor - Goat - WolfJojo Cansino0% (1)
- FEU EAC ITES103 ITEI103 Flowcharting and Pseudocoding StudVersionДокумент48 страницFEU EAC ITES103 ITEI103 Flowcharting and Pseudocoding StudVersionJojo CansinoОценок пока нет
- Chapter 7Документ73 страницыChapter 7Jojo CansinoОценок пока нет
- Network Security Revised-EricДокумент3 страницыNetwork Security Revised-EricJojo CansinoОценок пока нет
- Physical and Environmental SecurityДокумент84 страницыPhysical and Environmental SecurityJojo Cansino100% (1)
- Chapter 6Документ74 страницыChapter 6Jojo CansinoОценок пока нет
- Lab ManualДокумент9 страницLab ManualJojo CansinoОценок пока нет
- Datacomm Lab1 Osi Layer ModelДокумент2 страницыDatacomm Lab1 Osi Layer ModelJojo CansinoОценок пока нет
- FEU CryptographyДокумент26 страницFEU CryptographyJojo CansinoОценок пока нет
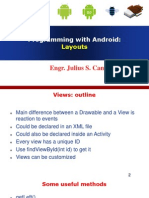
- Programming With Android: Programming With Android:: LayoutsДокумент29 страницProgramming With Android: Programming With Android:: LayoutsJojo CansinoОценок пока нет
- Electrical EngineeringДокумент6 страницElectrical EngineeringMuhammad Tariq SadiqОценок пока нет
- Laplace TransformДокумент37 страницLaplace TransformHeath LedgerОценок пока нет
- Control-Systems - FINAL -محاضرات 2019-2020Документ100 страницControl-Systems - FINAL -محاضرات 2019-2020الزهور لخدمات الانترنيتОценок пока нет
- Signals and Systems - S. GhoshДокумент53 страницыSignals and Systems - S. GhoshbnatarajОценок пока нет
- Fundamentals of Kalman Filtering - Paul PDFДокумент67 страницFundamentals of Kalman Filtering - Paul PDFA mjnОценок пока нет
- Chapter 2 - State Space FundamentalsДокумент60 страницChapter 2 - State Space FundamentalsaaaaaaaaaaaaaaaaaaaaaaaaaОценок пока нет
- 2EC6303-Signals and Systems QBДокумент10 страниц2EC6303-Signals and Systems QBShyla RajОценок пока нет
- 27 Introduction To Laplace TransformsДокумент21 страница27 Introduction To Laplace TransformsSadek AhmedОценок пока нет
- Signals & Systems Workbook PDFДокумент158 страницSignals & Systems Workbook PDFJohnnyОценок пока нет
- S&S Previous Question PapersДокумент75 страницS&S Previous Question PapersAllanki Sanyasi RaoОценок пока нет
- Semester III REV PDFДокумент68 страницSemester III REV PDFAnkit DalviОценок пока нет
- m2 PDFДокумент3 страницыm2 PDFKarthik A KulalОценок пока нет
- NOTES For EMT4801 2018Документ329 страницNOTES For EMT4801 2018RixizoNgobeniОценок пока нет
- Paper401 PDFДокумент2 страницыPaper401 PDFRoshan ShettyОценок пока нет
- Web Work EcuacionesДокумент7 страницWeb Work EcuacionesAlexMelgarОценок пока нет
- MathsДокумент15 страницMathsarup giri100% (1)
- Acas NotesДокумент189 страницAcas NotesAdi BhaiОценок пока нет
- Mechanical Scheme & Syllabus 180 03072019 PDFДокумент34 страницыMechanical Scheme & Syllabus 180 03072019 PDFdheeppakОценок пока нет
- Fractional Order Signal Pro PDFДокумент109 страницFractional Order Signal Pro PDFEladio LagosОценок пока нет
- Dssyll PDFДокумент168 страницDssyll PDFÅᴅᴀʀsʜ RᴀᴍОценок пока нет
- 20 5 Convolution THMДокумент8 страниц20 5 Convolution THMsanjayОценок пока нет
- Nirma University Institute of Technology Department of Electrical Engineering Subject: EE302: Network Analysis and SynthesisДокумент3 страницыNirma University Institute of Technology Department of Electrical Engineering Subject: EE302: Network Analysis and SynthesisAakarshak NandwaniОценок пока нет
- Recitation LT 1 - Basic 1 - 012221Документ24 страницыRecitation LT 1 - Basic 1 - 012221Muhammad Teguh IlhamОценок пока нет
- Electromagnetic and Circuit Simulation of Injection Probes For Bulk Current InjectionДокумент21 страницаElectromagnetic and Circuit Simulation of Injection Probes For Bulk Current InjectionvinothkumarОценок пока нет
- Inverse Laplace Transform of A ConstantДокумент4 страницыInverse Laplace Transform of A Constanttutorciecle1230% (1)
- Laplace-Stieltjes TransformДокумент4 страницыLaplace-Stieltjes Transformbrown222Оценок пока нет
- Reg. No. Paper 70757: Find KДокумент3 страницыReg. No. Paper 70757: Find Kvenkatmech2013Оценок пока нет
- Branching Processes: Galton-Watson Processes Were Introduced by Francis Galton in 1889 As A Simple MathematДокумент15 страницBranching Processes: Galton-Watson Processes Were Introduced by Francis Galton in 1889 As A Simple MathematAchmad FauzanОценок пока нет
- R19 B.Tech ECE II, III & IV Year Syllabus at MLRS-R19Документ91 страницаR19 B.Tech ECE II, III & IV Year Syllabus at MLRS-R19rupa kumar dhanavathОценок пока нет