Вам также может понравиться
- 03B How To Operate CCC S3++ Antisurge Control (Compatibility Mode)Документ24 страницы03B How To Operate CCC S3++ Antisurge Control (Compatibility Mode)elsyakieb100% (1)
- Fieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005От EverandFieldbus Systems and Their Applications 2005: A Proceedings volume from the 6th IFAC International Conference, Puebla, Mexico 14-25 November 2005Miguel Leon ChavezОценок пока нет
- 3500 - Proximitor and Seismic MonitorДокумент41 страница3500 - Proximitor and Seismic MonitortestvsptestОценок пока нет
- Dynamic Simulation and Process Control With Aspen HysysДокумент79 страницDynamic Simulation and Process Control With Aspen HysysMOHANRAJ.GОценок пока нет
- CCC White Paper Control Challenges of SMR Compressors Nov 2016Документ6 страницCCC White Paper Control Challenges of SMR Compressors Nov 2016ejzuppelli8036Оценок пока нет
- Manual For IA Controlers V6Документ60 страницManual For IA Controlers V6Bharadwaj SubramanianОценок пока нет
- DeltaVSISSafetyManual Dec08Документ62 страницыDeltaVSISSafetyManual Dec08Mohamed Labib100% (1)
- Anti Surge ControllersДокумент6 страницAnti Surge Controllersalimohebbi1361100% (1)
- Testing of TurbogeneratorДокумент77 страницTesting of Turbogeneratorsaitejajosyula100% (3)
- WW HMI SCADA-04 Discover The New Situational Awareness Library in InTouch 2014Документ45 страницWW HMI SCADA-04 Discover The New Situational Awareness Library in InTouch 2014steam100deg8229Оценок пока нет
- Improve Control of Liquid Level LoopsДокумент8 страницImprove Control of Liquid Level LoopsSyed Samir AlamОценок пока нет
- Orbit 60 Series System Datasheet 137M5182 PDFДокумент35 страницOrbit 60 Series System Datasheet 137M5182 PDFJuan Antonio MarinОценок пока нет
- TRICON Product Spec PDFДокумент78 страницTRICON Product Spec PDFUdaya Kumar Krishnan100% (1)
- Control Valve PerformanceДокумент11 страницControl Valve PerformancenjennsОценок пока нет
- Trusted Maintenance Training Manual (Rev. 3 - 0)Документ170 страницTrusted Maintenance Training Manual (Rev. 3 - 0)Mijail David Felix NarvaezОценок пока нет
- UDT & Detail UDTДокумент233 страницыUDT & Detail UDThenryhariyadiОценок пока нет
- Hydrocom Specification Petronor NP HISA V1 - 0Документ33 страницыHydrocom Specification Petronor NP HISA V1 - 0Nattapong Pongboot100% (1)
- B0700ax BДокумент38 страницB0700ax BRodrigoCastilloAcostaОценок пока нет
- Process Control and Common TermsДокумент210 страницProcess Control and Common TermsGeorge Markas100% (1)
- 03A How To Operate CCC S3 Antisurge Control PDFДокумент27 страниц03A How To Operate CCC S3 Antisurge Control PDFingezoneОценок пока нет
- .Process Instrument and Control (Week1 - 2) - 1681659856000Документ230 страниц.Process Instrument and Control (Week1 - 2) - 1681659856000NonsoОценок пока нет
- B0193uz AДокумент226 страницB0193uz AMiguel Angel Giménez100% (1)
- Tri Sen Surge ControlДокумент4 страницыTri Sen Surge ControlJimmy RumlusОценок пока нет
- Cascade ControlДокумент28 страницCascade Controlach_1964Оценок пока нет
- Lab 5Документ14 страницLab 5Ram MurtiОценок пока нет
- Tristation 4.16 Developers GuideДокумент1 108 страницTristation 4.16 Developers GuidePurnama Putra PontohОценок пока нет
- INDRAMAT Manuals 2065 PDFДокумент346 страницINDRAMAT Manuals 2065 PDFHoracio BritezОценок пока нет
- DCS Egypt PDFДокумент94 страницыDCS Egypt PDFMiliani AhmedОценок пока нет
- Surge Control: Compressor Surge and MeasurementДокумент4 страницыSurge Control: Compressor Surge and Measurementmtrj59100% (1)
- b0193df MДокумент182 страницыb0193df MFrancis RodríguezОценок пока нет
- DCS SystemДокумент19 страницDCS Systemubaid100% (1)
- 9720097-008 Safety Considerations Guide For Tricon v9-v10 Systems PDFДокумент116 страниц9720097-008 Safety Considerations Guide For Tricon v9-v10 Systems PDFRiva BonanoОценок пока нет
- Trisen TS160 TrainingДокумент105 страницTrisen TS160 TrainingGian ErzhaОценок пока нет
- Speedtronic Mark Vie: Maintenance TrainingДокумент6 страницSpeedtronic Mark Vie: Maintenance Trainingsmart_eng2009100% (1)
- Instrumentation CoursesДокумент2 страницыInstrumentation CoursesAbdul LateefОценок пока нет
- Voting LogicДокумент8 страницVoting LogicMoralba Seijas100% (1)
- FSC Safety Manager: Control FunctionsДокумент94 страницыFSC Safety Manager: Control FunctionsNaseer HydenОценок пока нет
- Honeywell FSCДокумент30 страницHoneywell FSCManoj Kage100% (1)
- Triconex TrainingДокумент38 страницTriconex Trainingvenkatsubbu0% (1)
- Pulper Rotor ManualДокумент10 страницPulper Rotor ManualhenryhariyadiОценок пока нет
- b0193mq MДокумент148 страницb0193mq MReinaldo Andres Castillo JopiaОценок пока нет
- A Tutorial On Cascade Control - Control NotesДокумент5 страницA Tutorial On Cascade Control - Control Notesaprk_paulrajОценок пока нет
- TN66Документ6 страницTN66Raja BalasubramaniamОценок пока нет
- 400 HДокумент49 страниц400 Hsina20795Оценок пока нет
- (Ebook) Tuning of Fuzzy Pid Controllers PDFДокумент22 страницы(Ebook) Tuning of Fuzzy Pid Controllers PDFJessica VélezОценок пока нет
- Centum VP Engineering: Course CodeДокумент3 страницыCentum VP Engineering: Course CodeRabah AmidiОценок пока нет
- 9720081-010 Triconex SOE Recorder Users Guide 4.5.0Документ130 страниц9720081-010 Triconex SOE Recorder Users Guide 4.5.0jorisanОценок пока нет
- It Alarms and EventsДокумент494 страницыIt Alarms and Eventswramadhani65Оценок пока нет
- Ehpm R2a 2012-08-24Документ11 страницEhpm R2a 2012-08-24Piush KumarОценок пока нет
- Eclipse 706 Pactware User Guide V3Документ26 страницEclipse 706 Pactware User Guide V3Abdul Shaharlal EОценок пока нет
- Experion LCN Tech Spec PDFДокумент27 страницExperion LCN Tech Spec PDFjashkishoreОценок пока нет
- System 57 5701 Control System ManualДокумент213 страницSystem 57 5701 Control System ManualRahul DevaОценок пока нет
- Beginner's Guide To Differential Pressure LevelДокумент9 страницBeginner's Guide To Differential Pressure LevelMigLoutОценок пока нет
- Safety Equipment Reliability Handbook: Second EditionДокумент20 страницSafety Equipment Reliability Handbook: Second EditionRabah AmidiОценок пока нет
- FloBoss s600+ Instruction ManualДокумент124 страницыFloBoss s600+ Instruction ManualHafidz HudaОценок пока нет
- Ipcs Automation: Preparing Students As Per The Industry DemandsДокумент8 страницIpcs Automation: Preparing Students As Per The Industry DemandsGince GeorgeОценок пока нет
- Enviando Enviando NIST Guide To Supervisory and Data Acquisition-SCADA and Industrial Control Systems Security (2007)Документ13 страницEnviando Enviando NIST Guide To Supervisory and Data Acquisition-SCADA and Industrial Control Systems Security (2007)j2pabloОценок пока нет
- Foxboro Eckardt Valve Pos e (HA031644 Issue 3)Документ28 страницFoxboro Eckardt Valve Pos e (HA031644 Issue 3)islamooov0% (1)
- Steam Turbine Control Solutions: FeaturesДокумент4 страницыSteam Turbine Control Solutions: Featuresmsw123Оценок пока нет
- Yokogawa Universal IOДокумент6 страницYokogawa Universal IOsinambeladavidОценок пока нет
- En 09 14 Eng Rev.4 Servo Gauge 854 AtgДокумент6 страницEn 09 14 Eng Rev.4 Servo Gauge 854 AtgTrịnh Đức HạnhОценок пока нет
- Distributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979От EverandDistributed Computer Control System: Proceedings of the IFAC Workshop, Tampa, Florida, U.S.A., 2-4 October 1979T. J. HarrisonОценок пока нет
- Aivosto Software Price List (US Dollars) PDFДокумент3 страницыAivosto Software Price List (US Dollars) PDFhenryhariyadiОценок пока нет
- PH Sensor Final SC24V GSДокумент4 страницыPH Sensor Final SC24V GShenryhariyadiОценок пока нет
- Computer Viruses The Technology and Evolution of An Artificial Life Form PDFДокумент269 страницComputer Viruses The Technology and Evolution of An Artificial Life Form PDFhenryhariyadiОценок пока нет
- Consistency Part List MEK2400Документ19 страницConsistency Part List MEK2400henryhariyadi100% (2)
- Axfa14g PDFДокумент12 страницAxfa14g PDFhenryhariyadiОценок пока нет
- General Specifications: Model EJA118W, EJA118N and EJA118Y Diaphragm Sealed Differential Pressure TransmittersДокумент16 страницGeneral Specifications: Model EJA118W, EJA118N and EJA118Y Diaphragm Sealed Differential Pressure TransmittershenryhariyadiОценок пока нет
- Consistency Control After The Machine Chest On A Four-Layer Board MachineДокумент2 страницыConsistency Control After The Machine Chest On A Four-Layer Board MachinehenryhariyadiОценок пока нет
- MEK-2500 Datasheet PDFДокумент2 страницыMEK-2500 Datasheet PDFhenryhariyadiОценок пока нет
- Data Sheet ACT-2500Документ2 страницыData Sheet ACT-2500henryhariyadiОценок пока нет
- TSS SS400 YokogawaДокумент12 страницTSS SS400 YokogawahenryhariyadiОценок пока нет
- Data Sheet BTG Tcr-2511Документ3 страницыData Sheet BTG Tcr-2511henryhariyadiОценок пока нет
- Yta310 & Yta320 YokogawaДокумент8 страницYta310 & Yta320 Yokogawahenryhariyadi100% (1)
- Model Ph8Erp KCL Refillable Type PH Sensor: User'S ManualДокумент29 страницModel Ph8Erp KCL Refillable Type PH Sensor: User'S ManualhenryhariyadiОценок пока нет
- Instruction Manual: Model WU10 VP CableДокумент8 страницInstruction Manual: Model WU10 VP CablehenryhariyadiОценок пока нет
- General Specifications: Model EJA210A and EJA220A Flange Mounted Differential Pressure TransmittersДокумент12 страницGeneral Specifications: Model EJA210A and EJA220A Flange Mounted Differential Pressure TransmittershenryhariyadiОценок пока нет
- The PidДокумент2 страницыThe PidhenryhariyadiОценок пока нет
- Using Pic Microcontrollers To Control Triacs 2053Документ22 страницыUsing Pic Microcontrollers To Control Triacs 2053Marko Lukic100% (1)
- EC3601 (1) - MergedДокумент5 страницEC3601 (1) - MergedRobin KumarОценок пока нет
- KET-3000W4 S-Mini AC Drive ManualДокумент127 страницKET-3000W4 S-Mini AC Drive ManualShashikant PatilОценок пока нет
- Gain Margin, Phase Margin, and Crossover Frequencies - MATLAB MarginДокумент3 страницыGain Margin, Phase Margin, and Crossover Frequencies - MATLAB Margintipo_de_incognitoОценок пока нет
- Filter Design 2Документ0 страницFilter Design 2www.bhawesh.com.npОценок пока нет
- Conference GuideДокумент111 страницConference GuideNhơn Phạm ThànhОценок пока нет
- Experiment No.1 Time Response of First Order System: 1.matlab ProgramДокумент5 страницExperiment No.1 Time Response of First Order System: 1.matlab ProgramDarshan DeepuОценок пока нет
- Iterative Learning Control Design For Smithpredictor: Qiuping Hu, Jian-Xin Xu, Tong Heng LeeДокумент10 страницIterative Learning Control Design For Smithpredictor: Qiuping Hu, Jian-Xin Xu, Tong Heng LeeKen HongОценок пока нет
- TUTORIAL 7 - Steady-State ErrorДокумент4 страницыTUTORIAL 7 - Steady-State ErrortiraОценок пока нет
- Systems and Controls PDFДокумент333 страницыSystems and Controls PDFAli Emrah YararОценок пока нет
- Readme PDFДокумент6 страницReadme PDFSaid EliasОценок пока нет
- Vacuum Oven: DZF ModelДокумент15 страницVacuum Oven: DZF ModelFernanda ContursiОценок пока нет
- DCS - SCADA - BMS Integration GatewayДокумент4 страницыDCS - SCADA - BMS Integration Gatewayamhosny64Оценок пока нет
- Controller Performance Evaluation For Concentration Control of Isothermal Continuous Stirred TankДокумент7 страницController Performance Evaluation For Concentration Control of Isothermal Continuous Stirred TankNicolás Pérez BarrigaОценок пока нет
- Simulation of Boiler Control Using PLC & SCADA: Shital S. Chopade, Pradhuman Verma, Prashant VermaДокумент4 страницыSimulation of Boiler Control Using PLC & SCADA: Shital S. Chopade, Pradhuman Verma, Prashant VermaNigamanand RaoОценок пока нет
- Technische Kundenunterlage Technical Customer Information: Produkt / Product: Typ / Type: Bestellnummer / Part NumberДокумент23 страницыTechnische Kundenunterlage Technical Customer Information: Produkt / Product: Typ / Type: Bestellnummer / Part NumberGaston_77Оценок пока нет
- Anandu PPT 1Документ11 страницAnandu PPT 1John AjishОценок пока нет
- Esm04 PDFДокумент7 страницEsm04 PDFPadmasri GirirajanОценок пока нет
- Finite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7Документ37 страницFinite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7UsamaKhalidОценок пока нет
- Sensor TechnologyДокумент6 страницSensor TechnologyAruna AkkiОценок пока нет
- Robust Reduced Complexity Modeling (R2CM) in Reservoir EngineeringДокумент1 страницаRobust Reduced Complexity Modeling (R2CM) in Reservoir EngineeringFoundation CMGОценок пока нет
- Unmanned Aerial Vehicles in Agriculture A Review of Perspective of Platform, Control, and ApplicationsДокумент16 страницUnmanned Aerial Vehicles in Agriculture A Review of Perspective of Platform, Control, and Applicationsjulio A. Zorro PerezОценок пока нет
- Ezpm ManualДокумент181 страницаEzpm ManualsivamОценок пока нет
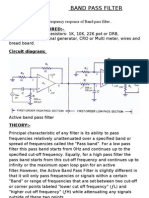
- Band Pass FilterДокумент3 страницыBand Pass FilterShruti MathurОценок пока нет
- Lecture 20 - Introduction To PID ControlДокумент23 страницыLecture 20 - Introduction To PID ControlhermelaОценок пока нет
- EceДокумент58 страницEceJanardhan ChОценок пока нет