Вам также может понравиться
- EVMS Full Notes PDFДокумент78 страницEVMS Full Notes PDFNaveen DhanurajОценок пока нет
- Chapter - 4 Control Configuration 4.1 Pid ControllerДокумент8 страницChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanОценок пока нет
- PID ControllersДокумент9 страницPID Controllerszs94qjqcx7Оценок пока нет
- Ep01-06 Control Loop and More Control Functions RC1012Документ36 страницEp01-06 Control Loop and More Control Functions RC1012Pop-Coman SimionОценок пока нет
- Cs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB SimulinkДокумент25 страницCs Project Report: Comparative Analysis of P, I, D, PI, PD, PID On Speed Control of DC Motor Using MATLAB Simulink2K19/EE/259 TUSHARОценок пока нет
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityДокумент39 страницAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaОценок пока нет
- PID ControllerДокумент6 страницPID ControllerpavittarОценок пока нет
- BTEC Unit 82 HND AerospaceДокумент14 страницBTEC Unit 82 HND AerospaceCraig JonesОценок пока нет
- Lab 6 Engineering Measurement and Lab SampleДокумент11 страницLab 6 Engineering Measurement and Lab Sampletk_atiqahОценок пока нет
- Examining The Fundamentals of PID ControlДокумент7 страницExamining The Fundamentals of PID ControlbariОценок пока нет
- Lab 5 ReportДокумент12 страницLab 5 ReportMelaku DinkuОценок пока нет
- Widya Sekar A - 194308038 - Laporan 2Документ39 страницWidya Sekar A - 194308038 - Laporan 2Agung KrisnaОценок пока нет
- Servo FundamentalsДокумент12 страницServo FundamentalsMohanraj SelvakumarОценок пока нет
- Self Balancing Robot Using PID Algorithm (STM MC) : Inverted PendulumДокумент10 страницSelf Balancing Robot Using PID Algorithm (STM MC) : Inverted Pendulumali alasdyОценок пока нет
- Control SystemДокумент30 страницControl SystemGarimaAsthaОценок пока нет
- Mechatronics Unit III and IV Question and AnswersДокумент6 страницMechatronics Unit III and IV Question and AnswersSaravanan MathiОценок пока нет
- Tarea2 Investigacion-Mcca-190090Документ13 страницTarea2 Investigacion-Mcca-190090Christian MendezОценок пока нет
- Basic TheoryДокумент5 страницBasic TheoryzakiОценок пока нет
- Figure 1 Process Under ControlДокумент9 страницFigure 1 Process Under ControlKajalОценок пока нет
- PCD ProjectДокумент3 страницыPCD ProjectSasmilah KandsamyОценок пока нет
- Group 4 Lab 5Документ16 страницGroup 4 Lab 5Melaku DinkuОценок пока нет
- Lab 5 Reportgroup Name IdДокумент16 страницLab 5 Reportgroup Name IdMelaku DinkuОценок пока нет
- CNC Mid 2 KeyДокумент6 страницCNC Mid 2 Keypala srinivas reddyОценок пока нет
- Closed Loop SystemsДокумент11 страницClosed Loop SystemsMohamed RashidОценок пока нет
- Position Control of Brushed DC Motor Using Pid Controller in MatlabДокумент5 страницPosition Control of Brushed DC Motor Using Pid Controller in MatlabJournal 4 Research100% (1)
- PID ControllerДокумент10 страницPID ControllerFarid HazwanОценок пока нет
- PID ControlДокумент11 страницPID Controlhd03Оценок пока нет
- PID Without A PHDДокумент7 страницPID Without A PHDEEpro808Оценок пока нет
- Contro EngineeringДокумент29 страницContro EngineeringNor AshimyОценок пока нет
- Control Lab Project ReportДокумент28 страницControl Lab Project ReportDanyal QamarОценок пока нет
- Lapres P4Документ19 страницLapres P4zakiОценок пока нет
- Mesb333 Pid ControlДокумент13 страницMesb333 Pid ControlMohd KhairiОценок пока нет
- Apc Term PaperДокумент9 страницApc Term PaperDarshan MalaniОценок пока нет
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerДокумент16 страницExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazОценок пока нет
- (IJET-V1I3P18) Authors :galal Ali Hassaan.Документ5 страниц(IJET-V1I3P18) Authors :galal Ali Hassaan.International Journal of Engineering and TechniquesОценок пока нет
- A Simple PID Controller With Adaptive Parameter in A DsPICДокумент5 страницA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifОценок пока нет
- Ejaet 2 11 43 48Документ6 страницEjaet 2 11 43 48Mekonnen ShewaregaОценок пока нет
- Ipc PPT 7thДокумент25 страницIpc PPT 7thChemical engrОценок пока нет
- Pid Without A PHD PDFДокумент14 страницPid Without A PHD PDFGiovanni Eliezer100% (2)
- PID Controller: From Wikipedia, The Free EncyclopediaДокумент17 страницPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlОценок пока нет
- MEC322 Chapter 1Документ47 страницMEC322 Chapter 1HaFiy HaZimОценок пока нет
- DDCДокумент22 страницыDDCBala SrivasОценок пока нет
- NI Tutorial 3782 enДокумент4 страницыNI Tutorial 3782 enhiperboreoatlantecОценок пока нет
- PID ControllersДокумент58 страницPID Controllerss12originalОценок пока нет
- Magnetic LevitationДокумент19 страницMagnetic LevitationJayDon100% (1)
- NI Tutorial 3782 enДокумент4 страницыNI Tutorial 3782 enpetergoodingОценок пока нет
- PID Without A PHDДокумент16 страницPID Without A PHDirfanexpertОценок пока нет
- Lecture - PID ControllerДокумент30 страницLecture - PID ControllerCyril Felix100% (1)
- Control of An Unstable Inverted Pendulum SystemДокумент11 страницControl of An Unstable Inverted Pendulum SystemShivankyJaiswalОценок пока нет
- Experiment 4Документ13 страницExperiment 4Usama NadeemОценок пока нет
- International Journal of Engineering Research and Development (IJERD)Документ5 страницInternational Journal of Engineering Research and Development (IJERD)IJERDОценок пока нет
- Control SystemДокумент10 страницControl Systemrajeswari_ece07Оценок пока нет
- Turbine Governor ModelingДокумент28 страницTurbine Governor ModelingGuruxyz100% (1)
- Probably The Best Simple PID Tuning Rules in The WorldДокумент12 страницProbably The Best Simple PID Tuning Rules in The WorldKarthi KarthyОценок пока нет
- Tuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmДокумент4 страницыTuning of PID Controller of Inverted Pendulum Using Genetic AlgorithmnguyendattdhОценок пока нет
- Control of DC Motor Using Different Control StrategiesОт EverandControl of DC Motor Using Different Control StrategiesОценок пока нет
- PROGRAMMING EXERCISE 03 Zarelle and CheloДокумент4 страницыPROGRAMMING EXERCISE 03 Zarelle and CheloJeremiah PuaОценок пока нет
- Advanced Techniques and Technology of Computer-Aided Feedback ControlОт EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlОценок пока нет
- DiscussionДокумент1 страницаDiscussionEnMaa 96Оценок пока нет
- KeeperKu TentativeДокумент1 страницаKeeperKu TentativeEnMaa 96Оценок пока нет
- Past Year Tribology 20172018Документ5 страницPast Year Tribology 20172018EnMaa 96Оценок пока нет
- Lecture Note - Root of EquationsДокумент14 страницLecture Note - Root of EquationsEnMaa 96Оценок пока нет
- Indore PPT 4 Tier II Sar CRM 8-06-2018Документ62 страницыIndore PPT 4 Tier II Sar CRM 8-06-2018Pallavi JayramОценок пока нет
- Astm A 53 PDFДокумент22 страницыAstm A 53 PDFminhyОценок пока нет
- European Safety Council Brochure PDFДокумент4 страницыEuropean Safety Council Brochure PDFjeevan georgeОценок пока нет
- P.T.A.H TechnologyДокумент71 страницаP.T.A.H Technologyjamjam_9567885393% (14)
- Admission Committee For Professional Courses (Acpc) : Institute Name Course Name VacantДокумент1 страницаAdmission Committee For Professional Courses (Acpc) : Institute Name Course Name VacantViha NaikОценок пока нет
- Frameless BrochureДокумент12 страницFrameless BrochureLucian CiprianОценок пока нет
- Solutions Profile: Using Fuzzy Logic in LogixДокумент2 страницыSolutions Profile: Using Fuzzy Logic in LogixpfalencarОценок пока нет
- 6-Experimental Cyclic Behavior of Reinforced Concrete Wall Houses Loaded in Their Weak Direction VELEZ EDGARDO M.Документ211 страниц6-Experimental Cyclic Behavior of Reinforced Concrete Wall Houses Loaded in Their Weak Direction VELEZ EDGARDO M.SedaОценок пока нет
- Bosch PDFДокумент2 страницыBosch PDFLeonardo AlexОценок пока нет
- Introduction For ControlДокумент6 страницIntroduction For ControlMohd FazliОценок пока нет
- 019 Atec Cavalca Custody Transfer Metering System For Natural Gas Refinery ApplicationДокумент24 страницы019 Atec Cavalca Custody Transfer Metering System For Natural Gas Refinery ApplicationSugeng SОценок пока нет
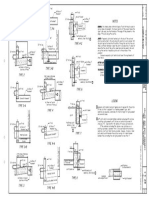
- ODOT CurbTypesДокумент1 страницаODOT CurbTypesJordan ParkerОценок пока нет
- Identification of Sags and Swells Using Pic MicrocontrollerДокумент6 страницIdentification of Sags and Swells Using Pic MicrocontrollerijsretОценок пока нет
- Variable Frequency TransformerДокумент31 страницаVariable Frequency TransformerAbhishek MishraОценок пока нет
- Result - VAS - B Tech S5 (R& S) Dec 2019 PDFДокумент49 страницResult - VAS - B Tech S5 (R& S) Dec 2019 PDFGjОценок пока нет
- Artificial Intelligence Anna University NotesДокумент156 страницArtificial Intelligence Anna University NotesskyisvisibleОценок пока нет
- ECE Regular Syllabus CBCS 1466004199887Документ150 страницECE Regular Syllabus CBCS 1466004199887NikeshОценок пока нет
- IABSE Symposium Report Volume 108Документ4 страницыIABSE Symposium Report Volume 108w1000000Оценок пока нет
- 00 Introduction To Highway Engineering PDFДокумент14 страниц00 Introduction To Highway Engineering PDFJustinOliver0% (1)
- Ch1 Introduction by Eng AdnanДокумент42 страницыCh1 Introduction by Eng AdnanMohamud Ahmed AbdulleОценок пока нет
- CV of Prof. Dr. Vijay KumarДокумент31 страницаCV of Prof. Dr. Vijay KumarSudhanwa KulkarniОценок пока нет
- NA To SS en 1991-1!4!2009 - PreviewДокумент8 страницNA To SS en 1991-1!4!2009 - Previewjasekan.dcОценок пока нет
- Horizontal Flow Wrapper Machine Case Study enДокумент4 страницыHorizontal Flow Wrapper Machine Case Study enastojadin1873Оценок пока нет
- Cad Cam Lab Manual AnДокумент54 страницыCad Cam Lab Manual AnPranjal SrivastavaОценок пока нет
- MatthewsДокумент50 страницMatthewsДрагана Скоко100% (1)
- Erection Checklist Tank Vol0Документ4 страницыErection Checklist Tank Vol0Oladimeji Taiwo100% (1)
- BEE Lab Manual - 2019-20Документ23 страницыBEE Lab Manual - 2019-20Venky DasamОценок пока нет
- Computer Integrated Manufacturing (CIM) .Документ5 страницComputer Integrated Manufacturing (CIM) .BHAGYESH JHANWARОценок пока нет
- Research Report Standard Forms of Contract in The Australian Construction IndustryДокумент60 страницResearch Report Standard Forms of Contract in The Australian Construction IndustrySteven Lim0% (1)
- Epc ContractsДокумент8 страницEpc ContractsSina Abasian nigjeОценок пока нет