Вам также может понравиться
- Three Phase Stator Windings: Types of A-C WindingsДокумент10 страницThree Phase Stator Windings: Types of A-C WindingsNiño John JaymeОценок пока нет
- Motor Winding ProcedureДокумент25 страницMotor Winding Procedureutility supplyОценок пока нет
- Lecture14 - Stator Phase Circuits & Coil Design, Part 1Документ21 страницаLecture14 - Stator Phase Circuits & Coil Design, Part 1ramaswamykama786Оценок пока нет
- Unit 1 Winding Diagrams ACFrOgBLv3jQql XS0mojv Rm4IhrA3Ixg 8LjgQEhauZsbQF XoXx18e7eUzNXGzzY7jgpUE4DoLDtEB3IdbkZhinqXaMy1Sn7Vd6OGLZHAOp - GCR6hDuTHTJДокумент30 страницUnit 1 Winding Diagrams ACFrOgBLv3jQql XS0mojv Rm4IhrA3Ixg 8LjgQEhauZsbQF XoXx18e7eUzNXGzzY7jgpUE4DoLDtEB3IdbkZhinqXaMy1Sn7Vd6OGLZHAOp - GCR6hDuTHTJmanikanta2235789Оценок пока нет
- Improved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)От EverandImproved Indirect Power Control (IDPC) of Wind Energy Conversion Systems (WECS)Оценок пока нет
- Winding Design of Induction MotorsДокумент7 страницWinding Design of Induction MotorsKarthik MohankumarОценок пока нет
- Power Electronics Design Handbook: Low-Power Components and ApplicationsОт EverandPower Electronics Design Handbook: Low-Power Components and ApplicationsРейтинг: 4 из 5 звезд4/5 (2)
- Plug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideОт EverandPlug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideОценок пока нет
- L.D. College Elements of Electrical Design Armature WindingДокумент21 страницаL.D. College Elements of Electrical Design Armature WindingBhavarth VaidyaОценок пока нет
- AC & DC WindingДокумент29 страницAC & DC WindingAtiq Daultana50% (4)
- Worked Examples in Electrical Machines and Drives: Applied Electricity and ElectronicsОт EverandWorked Examples in Electrical Machines and Drives: Applied Electricity and ElectronicsРейтинг: 3 из 5 звезд3/5 (5)
- Design of Synchronous MachinesДокумент17 страницDesign of Synchronous MachinesNiteshNarukaОценок пока нет
- Control in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977От EverandControl in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977W. LeonhardОценок пока нет
- Electric Circuit Armature Windings PDFДокумент43 страницыElectric Circuit Armature Windings PDFravineel00975% (8)
- WindingДокумент49 страницWindingserpent7700Оценок пока нет
- Reluctance MotorДокумент16 страницReluctance Motorapi-382713280% (5)
- Induction MotorsДокумент81 страницаInduction MotorsIdhamtanahbaruОценок пока нет
- How To Deal With Stator Core DamageДокумент11 страницHow To Deal With Stator Core Damagewas00266100% (2)
- Motor Rewinding - DETAILS OF WINDINGДокумент12 страницMotor Rewinding - DETAILS OF WINDINGAbdul Halil Abdullah100% (1)
- Electric DrivesДокумент15 страницElectric DriveskalerusaОценок пока нет
- Schrage MotorsДокумент10 страницSchrage MotorsAbhishek O100% (2)
- Electrical MotorsДокумент53 страницыElectrical MotorsSuda KrishnarjunaraoОценок пока нет
- Design of StatorДокумент22 страницыDesign of StatorKumar MadhuОценок пока нет
- Slip-Ring Motor Introduction & ApplicationДокумент7 страницSlip-Ring Motor Introduction & ApplicationRonald Dumangeng Pitpitunge100% (2)
- Armature WindingДокумент17 страницArmature Windingvasu_koneti5124Оценок пока нет
- Induction CookersДокумент5 страницInduction CookersVăn LinОценок пока нет
- Induction Motors ExplainedДокумент165 страницInduction Motors ExplainedMillion GebretsadikОценок пока нет
- DC and Ac Motor WindingДокумент29 страницDC and Ac Motor Windingఅవినాష్ ఎవిఆర్100% (2)
- Three Phase Induction Motor Construction and WorkingДокумент63 страницыThree Phase Induction Motor Construction and WorkingMce RegОценок пока нет
- Ansoft RMxprt DC Motor AnalysisДокумент32 страницыAnsoft RMxprt DC Motor AnalysisVladimir Kuznetsov100% (1)
- Multi-turn coils and winding types explainedДокумент3 страницыMulti-turn coils and winding types explainedmanjumtech0034269Оценок пока нет
- P A G E 3 MC Emd-Three Phase Induction MotorДокумент9 страницP A G E 3 MC Emd-Three Phase Induction MotornikunjОценок пока нет
- Lap Vs ConcentricДокумент7 страницLap Vs ConcentricAmr Diaa El-Din El-FawalОценок пока нет
- Problem 1: 4.2 Ac Three Phase Winding 4.2.1 Single Layer WindingДокумент14 страницProblem 1: 4.2 Ac Three Phase Winding 4.2.1 Single Layer WindingSumathi A - PSGCT100% (1)
- No Load and Blocked Rotor TestДокумент19 страницNo Load and Blocked Rotor Testsupere100% (4)
- Motor Rewinding - DETAILS OF WINDINGДокумент12 страницMotor Rewinding - DETAILS OF WINDINGAbdul Halil Abdullah100% (1)
- 2.1concentric WindingДокумент17 страниц2.1concentric Windingzelalem walieОценок пока нет
- Rewinding 3 PhaseДокумент29 страницRewinding 3 PhaseFarhan Afzal80% (5)
- Three Phase Induction MotorДокумент11 страницThree Phase Induction MotorMohamed Ashraf Abd Elaazem Ali ٢٠١٥٠١٣٨٣Оценок пока нет
- A Three-Phase Induction Motor ProblemДокумент26 страницA Three-Phase Induction Motor ProblemmehmetОценок пока нет
- A.C. Motor and Its TypesДокумент10 страницA.C. Motor and Its TypessasidaranОценок пока нет
- Construction of Machine PDFДокумент110 страницConstruction of Machine PDFAvinash SinghОценок пока нет
- Analysis of Axial Flux MotorДокумент4 страницыAnalysis of Axial Flux MotorAvi GuptaОценок пока нет
- Slot WindingДокумент22 страницыSlot WindingFitri Senpai75% (4)
- Armature WindingДокумент8 страницArmature WindingPravin HandeОценок пока нет
- Fundamentals of Electromechanical Energy ConversationsДокумент13 страницFundamentals of Electromechanical Energy ConversationsAslanОценок пока нет
- Axial Flux Permanent Magnet Disc Machines - A ReviewДокумент12 страницAxial Flux Permanent Magnet Disc Machines - A ReviewMostafa Ahmadi100% (3)
- BLDC ControlДокумент16 страницBLDC ControlSaurabh DashОценок пока нет
- Starting Methods of Three Phase Induction MotorsДокумент15 страницStarting Methods of Three Phase Induction MotorsMohitSharmaОценок пока нет
- Calculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL StarterДокумент5 страницCalculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL Startererson1981Оценок пока нет
- Lecture1 - History & IntroductionДокумент20 страницLecture1 - History & Introductionramaswamykama786100% (1)
- Injection Pump PartsДокумент2 страницыInjection Pump PartsBhobz 1135Оценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Alternator Repair CДокумент1 страницаAlternator Repair CBhobz 1135Оценок пока нет
- Alternator Repair AДокумент1 страницаAlternator Repair ABhobz 1135Оценок пока нет
- The Complete Guide To Wiring, Updated 6th Edition Current With 2014-2017 Electrical CodesДокумент339 страницThe Complete Guide To Wiring, Updated 6th Edition Current With 2014-2017 Electrical CodesAngelino Bozzini100% (3)
- IacvДокумент8 страницIacvBhobz 1135Оценок пока нет
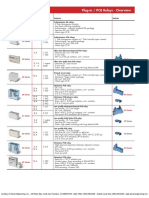
- Plug-In / PCB Relays - Overview: 30 SeriesДокумент71 страницаPlug-In / PCB Relays - Overview: 30 SeriesBhobz 1135Оценок пока нет
- Angina Tagalog PDFДокумент4 страницыAngina Tagalog PDFJoejee Reyes Jr.Оценок пока нет
- AsthmaДокумент8 страницAsthmaJade DeopidoОценок пока нет
- Engine Controls & SensorsДокумент8 страницEngine Controls & Sensorsrudey18Оценок пока нет
- Cooling System PDFДокумент48 страницCooling System PDFBhobz 1135Оценок пока нет
- Wiring DiagramsДокумент4 страницыWiring DiagramsAli Shaikh Abdul50% (2)
- CAN Vehicle Emission Control Systems Article PDFДокумент7 страницCAN Vehicle Emission Control Systems Article PDFBhobz 1135Оценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 2014 Nissan Service Maintenance GuideДокумент69 страниц2014 Nissan Service Maintenance GuideJAmshed IQbalОценок пока нет
- Brake Handbook - Fred PuhnДокумент178 страницBrake Handbook - Fred PuhnGuilherme Pfeilsticker78% (9)
- Electrical and Electronic SymbolДокумент15 страницElectrical and Electronic Symbolbobby aldaveОценок пока нет
- DC and Ac Motor WindingДокумент29 страницDC and Ac Motor Windingఅవినాష్ ఎవిఆర్100% (2)
- Diccionario de Simbología CaterpillarДокумент82 страницыDiccionario de Simbología CaterpillarRodolfo Alberto Muñoz Carcamo100% (4)
- Genie Willmar Forklift Codes PDFДокумент1 страницаGenie Willmar Forklift Codes PDFBhobz 1135Оценок пока нет
- Motor Rewinding PDFДокумент343 страницыMotor Rewinding PDFsailolla3086% (87)
- Error CodeДокумент2 страницыError CodeBhobz 1135Оценок пока нет
- Drill sizes for tapping metric and imperial threadsДокумент1 страницаDrill sizes for tapping metric and imperial threadsabhinishane100% (1)
- Advanced milling machine techniquesДокумент32 страницыAdvanced milling machine techniquesChandran Pandiyan100% (1)
- Service Manual Common Rail System (CRS) - DensoДокумент134 страницыService Manual Common Rail System (CRS) - DensoThang Tong86% (7)
- Diccionario de Simbología CaterpillarДокумент82 страницыDiccionario de Simbología CaterpillarRodolfo Alberto Muñoz Carcamo100% (4)
- Electrical and Electronic SymbolДокумент15 страницElectrical and Electronic Symbolbobby aldaveОценок пока нет
- Error CodeДокумент2 страницыError CodeBhobz 1135Оценок пока нет
- Genie Willmar Forklift Codes PDFДокумент1 страницаGenie Willmar Forklift Codes PDFBhobz 1135Оценок пока нет
- 1420 MHZ LNA SSB-Electronic SLN-1420 1v0Документ6 страниц1420 MHZ LNA SSB-Electronic SLN-1420 1v0ga6ba5Оценок пока нет
- DSC QuickUserGuide PC1616 PC1832 PC1864Документ4 страницыDSC QuickUserGuide PC1616 PC1832 PC1864Marko MarkovicОценок пока нет
- J5200Документ5 страницJ5200Yan TyОценок пока нет
- Samsung LPC 247sm-06sДокумент2 страницыSamsung LPC 247sm-06saboalghadbОценок пока нет
- Midac Li-Ion BatteriesДокумент8 страницMidac Li-Ion Batteriescrash2804Оценок пока нет
- BeoLab 8000 Setup GuideДокумент8 страницBeoLab 8000 Setup GuidewatchabcОценок пока нет
- User's Manual for Blue Star VRF V Plus Air Conditioning SystemДокумент40 страницUser's Manual for Blue Star VRF V Plus Air Conditioning Systemjayesh patel100% (1)
- Engine Immobilizer System Circuit DiagramДокумент26 страницEngine Immobilizer System Circuit Diagrammarcelo ustarez100% (3)
- Biolaser CatalogДокумент4 страницыBiolaser Catalogஅன்பழகன் αηβμОценок пока нет
- Rail to Rail Op-Amps from STMicroelectronicsДокумент10 страницRail to Rail Op-Amps from STMicroelectronicsantonio170172Оценок пока нет
- EGE Infrared DetectorsДокумент12 страницEGE Infrared DetectorsYing Kei ChanОценок пока нет
- DIWH Series: Diko Elektrikli Cihazlar San. Ve Tic. A.ŞДокумент19 страницDIWH Series: Diko Elektrikli Cihazlar San. Ve Tic. A.ŞEric ToroОценок пока нет
- PSpice Simulation of Basic DC CircuitsДокумент11 страницPSpice Simulation of Basic DC CircuitsArifuzzamanFaisalОценок пока нет
- Ac Servo MotorДокумент14 страницAc Servo MotorJeyanthОценок пока нет
- INT 21H - DOS Function CallДокумент14 страницINT 21H - DOS Function CallNgô Văn ThiệnОценок пока нет
- Ret620 Ansi BRДокумент4 страницыRet620 Ansi BRFernando TamayoОценок пока нет
- Automotive Applications of EMPTДокумент7 страницAutomotive Applications of EMPTrovichmaОценок пока нет
- Development and Test of An Experimental Hybrid Sounding RocketДокумент10 страницDevelopment and Test of An Experimental Hybrid Sounding RocketLeo LonardelliОценок пока нет
- Alsatom Su100m - Su100mb - Service ManualДокумент13 страницAlsatom Su100m - Su100mb - Service ManualEdithMardonesTroncoso100% (1)
- IIEE Guide For The Design and Installation of ServiceДокумент51 страницаIIEE Guide For The Design and Installation of ServiceJoel Remegio100% (1)
- 2023 PG SubstationEquipment-eДокумент2 страницы2023 PG SubstationEquipment-eUsman KhanОценок пока нет
- PASS - 245 - KV - 9AKK108467A803 - EN - A23Документ2 страницыPASS - 245 - KV - 9AKK108467A803 - EN - A23ManuelОценок пока нет
- System ModelingДокумент64 страницыSystem ModelingShuvo ShahedОценок пока нет
- Wrfase Acceptance Letter 360 PDFДокумент3 страницыWrfase Acceptance Letter 360 PDFRizka SeptianaОценок пока нет
- Active Infrared Motion Detector Security SystemДокумент24 страницыActive Infrared Motion Detector Security SystemIsuru Chamath Hettiarachchi100% (1)
- Ds Parani Sd1000Документ2 страницыDs Parani Sd1000crystalng5259Оценок пока нет
- Catalogue 170M6546Документ1 страницаCatalogue 170M6546Huỳnh Trung ChinhОценок пока нет
- SY-8100 Manual OperacionДокумент36 страницSY-8100 Manual OperacionJOse ArmentaОценок пока нет
- RBS 6000 Technical DataДокумент15 страницRBS 6000 Technical DataMohammed Makled100% (1)
- Pirated Movie Release TypeДокумент5 страницPirated Movie Release TypeNitir AseemОценок пока нет