Вам также может понравиться
- Injection Pump PartsДокумент2 страницыInjection Pump PartsBhobz 1135Оценок пока нет
- Alternator Repair AДокумент1 страницаAlternator Repair ABhobz 1135Оценок пока нет
- Alternator Repair CДокумент1 страницаAlternator Repair CBhobz 1135Оценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
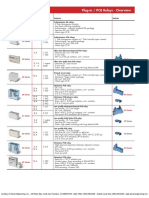
- Plug-In / PCB Relays - Overview: 30 SeriesДокумент71 страницаPlug-In / PCB Relays - Overview: 30 SeriesBhobz 1135Оценок пока нет
- AsthmaДокумент8 страницAsthmaJade DeopidoОценок пока нет
- Angina Tagalog PDFДокумент4 страницыAngina Tagalog PDFJoejee Reyes Jr.Оценок пока нет
- Cooling System PDFДокумент48 страницCooling System PDFBhobz 1135Оценок пока нет
- Motor Rewinding PDFДокумент343 страницыMotor Rewinding PDFsailolla3086% (87)
- Brake Handbook - Fred PuhnДокумент178 страницBrake Handbook - Fred PuhnGuilherme Pfeilsticker78% (9)
- Engine Controls & SensorsДокумент8 страницEngine Controls & Sensorsrudey18Оценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Stator Winding Design Considerations of Electric MotorsДокумент12 страницStator Winding Design Considerations of Electric MotorsBhobz 1135Оценок пока нет
- IacvДокумент8 страницIacvBhobz 1135Оценок пока нет
- 2014 Nissan Service Maintenance GuideДокумент69 страниц2014 Nissan Service Maintenance GuideJAmshed IQbalОценок пока нет
- The Complete Guide To Wiring, Updated 6th Edition Current With 2014-2017 Electrical CodesДокумент339 страницThe Complete Guide To Wiring, Updated 6th Edition Current With 2014-2017 Electrical CodesAngelino Bozzini100% (3)
- Advanced milling machine techniquesДокумент32 страницыAdvanced milling machine techniquesChandran Pandiyan100% (1)
- Diccionario de Simbología CaterpillarДокумент82 страницыDiccionario de Simbología CaterpillarRodolfo Alberto Muñoz Carcamo100% (4)
- DC and Ac Motor WindingДокумент29 страницDC and Ac Motor Windingఅవినాష్ ఎవిఆర్100% (2)
- Error CodeДокумент2 страницыError CodeBhobz 1135Оценок пока нет
- Error CodeДокумент2 страницыError CodeBhobz 1135Оценок пока нет
- Electrical and Electronic SymbolДокумент15 страницElectrical and Electronic Symbolbobby aldaveОценок пока нет
- Genie Willmar Forklift Codes PDFДокумент1 страницаGenie Willmar Forklift Codes PDFBhobz 1135Оценок пока нет
- Wiring DiagramsДокумент4 страницыWiring DiagramsAli Shaikh Abdul50% (2)
- Diccionario de Simbología CaterpillarДокумент82 страницыDiccionario de Simbología CaterpillarRodolfo Alberto Muñoz Carcamo100% (4)
- Drill sizes for tapping metric and imperial threadsДокумент1 страницаDrill sizes for tapping metric and imperial threadsabhinishane100% (1)
- Genie Willmar Forklift Codes PDFДокумент1 страницаGenie Willmar Forklift Codes PDFBhobz 1135Оценок пока нет
- Electrical and Electronic SymbolДокумент15 страницElectrical and Electronic Symbolbobby aldaveОценок пока нет
- Service Manual Common Rail System (CRS) - DensoДокумент134 страницыService Manual Common Rail System (CRS) - DensoThang Tong86% (7)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Horizontal Projectile WSДокумент3 страницыHorizontal Projectile WSForsbergPhysicsОценок пока нет
- Ex Ophtalmo Eng 1Документ4 страницыEx Ophtalmo Eng 1Roxana PascalОценок пока нет
- Series: Mechanical Style Pressure SwitchДокумент15 страницSeries: Mechanical Style Pressure SwitchPhúc Phan TiếnОценок пока нет
- HHG4M - Lifespan Development Textbook Lesson 4Документ88 страницHHG4M - Lifespan Development Textbook Lesson 4Lubomira SucheckiОценок пока нет
- SAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESДокумент13 страницSAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESKinosraj KumaranОценок пока нет
- DUB01CB Eng PDFДокумент4 страницыDUB01CB Eng PDFAnonymous hj273CMОценок пока нет
- Technical PaperДокумент6 страницTechnical PaperSIJO MONACHANОценок пока нет
- Mahindra Powertrain - Market StrategyДокумент4 страницыMahindra Powertrain - Market StrategyEshan KapoorОценок пока нет
- Rahim Acar - Talking About God and Talking About Creation. Avicennas and Thomas Aquinas Positions 2005 PDFДокумент134 страницыRahim Acar - Talking About God and Talking About Creation. Avicennas and Thomas Aquinas Positions 2005 PDFPricopi VictorОценок пока нет
- Nitration of Methyl BenzoateДокумент3 страницыNitration of Methyl BenzoateDaniel McDermottОценок пока нет
- Why Check Valves SlamДокумент2 страницыWhy Check Valves SlamBramJanssen76Оценок пока нет
- Sanoj Kumar - OriginalДокумент5 страницSanoj Kumar - OriginalHamid SaifОценок пока нет
- Solution Guide For PpeДокумент45 страницSolution Guide For PpeTrek Apostol57% (7)
- Polycab HT XlpeДокумент33 страницыPolycab HT Xlpezafrikhan875Оценок пока нет
- Regular Manual Cleaning: Mimaki Printer Maintenance and Long-Term Storage OptionsДокумент3 страницыRegular Manual Cleaning: Mimaki Printer Maintenance and Long-Term Storage OptionshumbyxОценок пока нет
- BBO 2011 ROUND 2 QUESTIONSДокумент16 страницBBO 2011 ROUND 2 QUESTIONSMalvina YuanОценок пока нет
- Synopsis THESIS 2022: Aiswarya Vs Tqarebc005 S10Документ5 страницSynopsis THESIS 2022: Aiswarya Vs Tqarebc005 S10Asna DTОценок пока нет
- Pump Characteristics ExperimentДокумент7 страницPump Characteristics ExperimentJam JoОценок пока нет
- English Qualification TestДокумент5 страницEnglish Qualification TestMoh FaisolОценок пока нет
- 1830PSS R36 QuickReferenceGuide 8DG60888JAAAДокумент66 страниц1830PSS R36 QuickReferenceGuide 8DG60888JAAAFelippe CanatoОценок пока нет
- Large and Medium Manufacturing Industry Survey Report 2018Документ778 страницLarge and Medium Manufacturing Industry Survey Report 2018melakuОценок пока нет
- Demo DLLДокумент2 страницыDemo DLLArlene Diokno100% (1)
- Data Biostataplus Sbi2014-EДокумент4 страницыData Biostataplus Sbi2014-ELucila Milagros PinillosОценок пока нет
- The Karnataka Maternity Benefit (Amendment) Rules 2019Документ30 страницThe Karnataka Maternity Benefit (Amendment) Rules 2019Manisha SОценок пока нет
- Shop Math PDFДокумент29 страницShop Math PDFKen LeeОценок пока нет
- Assignment #1: 1 HgjyygbykvrfДокумент1 страницаAssignment #1: 1 HgjyygbykvrfJuan Sebastian ArangoОценок пока нет
- 2nd - Science-Second-Quarter-Week-1Документ37 страниц2nd - Science-Second-Quarter-Week-1Arlene AranzasoОценок пока нет
- GreyFox Intercom Install GuideДокумент12 страницGreyFox Intercom Install GuideAbdallah HashemОценок пока нет
- Arihant 40 Days Crash Course For JEE Main Physics (Crackjee - Xyz)Документ464 страницыArihant 40 Days Crash Course For JEE Main Physics (Crackjee - Xyz)Milan Dai50% (4)
- Consumer preference towards branded milk: A comparative analysis of Verka milk and Amul milkДокумент12 страницConsumer preference towards branded milk: A comparative analysis of Verka milk and Amul milkBhawna RehanОценок пока нет