Вам также может понравиться
- Flight ControllerДокумент30 страницFlight ControllerUsama FaisalОценок пока нет
- New Microsoft Word DocumentДокумент22 страницыNew Microsoft Word DocumentUsama FaisalОценок пока нет
- Project DroneДокумент10 страницProject DroneJulius Ronaldo Betanov0% (1)
- CodeДокумент6 страницCodeSujay PawarОценок пока нет
- CED19I032Документ12 страницCED19I032Pranavram VОценок пока нет
- CED19I032Документ13 страницCED19I032Pranavram VОценок пока нет
- Include IncludeДокумент8 страницInclude IncludeAhmet TuncaОценок пока нет
- Very Very ImportantДокумент6 страницVery Very ImportantnehalОценок пока нет
- EDM18B010 - Expt4-Embedded System Design PracticeДокумент9 страницEDM18B010 - Expt4-Embedded System Design PracticeCHIRAG C M CHIRAG C MОценок пока нет
- PIC18 Pulse Width ModulationДокумент16 страницPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Lab 13Документ11 страницLab 13ubaidОценок пока нет
- Experiment 4 Stepper Motor Control With Systick Timer: 1 ObjectivesДокумент5 страницExperiment 4 Stepper Motor Control With Systick Timer: 1 ObjectivesEVD18I001 A BALAVIGNESHОценок пока нет
- IK_BALANCINGДокумент7 страницIK_BALANCINGTanner DuncanОценок пока нет
- Dron Controller Listing ProgramДокумент3 страницыDron Controller Listing ProgramAl MtdrsОценок пока нет
- isd_code4Документ5 страницisd_code4Khushi AgrawalОценок пока нет
- RPMДокумент18 страницRPMCarlos Alberto Venancio PerezОценок пока нет
- 1.listing Program Ardino (Pitct Terbang Keatas)Документ7 страниц1.listing Program Ardino (Pitct Terbang Keatas)Al MtdrsОценок пока нет
- Code For Fruit Plucking Robot Using ATMEGA2560Документ16 страницCode For Fruit Plucking Robot Using ATMEGA2560Karthik K V Hathwar100% (2)
- Esd Lab - (6) : (Roll N0.:-201501094)Документ10 страницEsd Lab - (6) : (Roll N0.:-201501094)Darshan ShahОценок пока нет
- ULN2003 SketchДокумент4 страницыULN2003 Sketchkidal permonoОценок пока нет
- Initgpio: Void VoidДокумент12 страницInitgpio: Void Voidapi-397509789Оценок пока нет
- Code DumpДокумент17 страницCode DumpGameplay OrIgInAlIОценок пока нет
- Servo Motor Control Using SysTick Timer in Keil SoftwareДокумент10 страницServo Motor Control Using SysTick Timer in Keil SoftwareCED19I004 KOWSHIK KUMAR .KОценок пока нет
- Arduino Control Car V2Документ4 страницыArduino Control Car V2Mikaela E Ramírez HerreraОценок пока нет
- PidДокумент5 страницPidArif Nugroho100% (1)
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderДокумент13 страницPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- Basis CodesДокумент15 страницBasis CodesJholo LopezОценок пока нет
- PIR Motion Sensor AlarmДокумент46 страницPIR Motion Sensor AlarmSyad AlyОценок пока нет
- Ardu5 para S4AДокумент6 страницArdu5 para S4AEDWARD ENRIQUE ROJAS BARBOSAОценок пока нет
- Motor Controlled by MPG at Best Rev No Display VersionДокумент2 страницыMotor Controlled by MPG at Best Rev No Display VersionKurdlost SulyОценок пока нет
- Obstacle Avoid RobotДокумент4 страницыObstacle Avoid RobotRobby surya f100% (1)
- Teste Codigo Automato ArduinoДокумент15 страницTeste Codigo Automato ArduinoCrhistian IzaguirryОценок пока нет
- The Ultrasonic SensorДокумент14 страницThe Ultrasonic SensorAdalberto Sharpley100% (1)
- OrgcmdДокумент13 страницOrgcmdMuhammad Jalal AldeenОценок пока нет
- ATMega16 Microcontroller Digital LM35 LCD ThermometerДокумент4 страницыATMega16 Microcontroller Digital LM35 LCD ThermometerAdrianMartinezMendez100% (3)
- Fa20-Bee-150 MP Lab Report - 07Документ5 страницFa20-Bee-150 MP Lab Report - 07Saadat KhanОценок пока нет
- PWM CДокумент2 страницыPWM CMore FunОценок пока нет
- Çalışıyor GibiДокумент11 страницÇalışıyor GibiAli Arda YıldızОценок пока нет
- Скетч от неизвестногоДокумент3 страницыСкетч от неизвестногоLaserskayaОценок пока нет
- Aurduino 12345Документ4 страницыAurduino 12345adershОценок пока нет
- GPS CodingДокумент13 страницGPS CodinghimanshuОценок пока нет
- Lab06 - Smart Home Automation Using SensorsДокумент14 страницLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Project CodeДокумент6 страницProject CodeK M Kiran KumarОценок пока нет
- Embedded C ProgramДокумент7 страницEmbedded C ProgramLucifer100% (1)
- ProjectcodeДокумент3 страницыProjectcodeRahul YadavОценок пока нет
- Ee 222 CepДокумент10 страницEe 222 CepObed AhmadОценок пока нет
- Arduino Workshoop LoeДокумент8 страницArduino Workshoop Loetalha.k.rajpootОценок пока нет
- Fa20-Bee-150 MP Lab Report - 10Документ6 страницFa20-Bee-150 MP Lab Report - 10Saadat KhanОценок пока нет
- Dsp programs for signal generation and ADC acquisitionДокумент14 страницDsp programs for signal generation and ADC acquisitionJaipaul CheernamОценок пока нет
- PidДокумент7 страницPidEmilio Arrieta GallardoОценок пока нет
- DocxДокумент9 страницDocxCường TrầnОценок пока нет
- Mini Project Current and Voltage SensorДокумент5 страницMini Project Current and Voltage SensorMuhammad Aneeb KhanОценок пока нет
- CodigoДокумент5 страницCodigopepe pecasОценок пока нет
- Automatic Fire Fighting Robot - InoДокумент4 страницыAutomatic Fire Fighting Robot - InoMuhammad UsamaОценок пока нет
- Code UДокумент4 страницыCode Ukaloy33Оценок пока нет
- Stepper TextДокумент1 страницаStepper TextfОценок пока нет
- WWW Ermicro ComДокумент19 страницWWW Ermicro ComDinosaurio1990Оценок пока нет
- PIC18F4550 microcontroller library and configuration codeДокумент6 страницPIC18F4550 microcontroller library and configuration codeJhon PerezОценок пока нет
- Projects With Microcontrollers And PICCОт EverandProjects With Microcontrollers And PICCРейтинг: 5 из 5 звезд5/5 (1)
- User Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faДокумент84 страницыUser Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faCarlos ReisОценок пока нет
- INVENTORY REPORTДокумент29 страницINVENTORY REPORTBujang SuksesОценок пока нет
- Pengantar TelekomunikasiДокумент5 страницPengantar TelekomunikasiDevy KhantiОценок пока нет
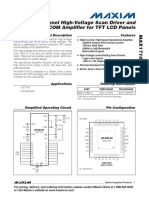
- 10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsДокумент10 страниц10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsVinicius MarcosОценок пока нет
- At-CP1E CPU Unit SoftwareДокумент450 страницAt-CP1E CPU Unit SoftwareNikolas Kolasni Lakenir Ckerde DockosОценок пока нет
- S Cubed DatasheetДокумент2 страницыS Cubed DatasheetGulf JobzОценок пока нет
- FJ Ary90 TM FujitsuДокумент15 страницFJ Ary90 TM FujitsuSopon CristiОценок пока нет
- Impedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsДокумент26 страницImpedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsHeiner Farid Castillo AvellaОценок пока нет
- Fire Alarm Concepts - QuizДокумент37 страницFire Alarm Concepts - QuizAhmed KhairiОценок пока нет
- Tutorial 3 VFD Motor AdvancedДокумент20 страницTutorial 3 VFD Motor AdvancedTrần Nguyên KhảiОценок пока нет
- CH 05Документ14 страницCH 05Abdul Shokor Abd TalibОценок пока нет
- Compactline Easy Antenna, Ultra High Performance, Dual Polarized, 2 FTДокумент3 страницыCompactline Easy Antenna, Ultra High Performance, Dual Polarized, 2 FTLuciano Silvério LeiteОценок пока нет
- Positive IsolationДокумент10 страницPositive IsolationArunava Basak0% (1)
- En User Guide Dell P2417HДокумент13 страницEn User Guide Dell P2417Hsupriyo110Оценок пока нет
- PLC ProjectДокумент69 страницPLC Projectsovon adhikaryОценок пока нет
- Yta310 & Yta320 YokogawaДокумент8 страницYta310 & Yta320 Yokogawahenryhariyadi100% (1)
- LTE FDD Cluster DT - Analysis ReportДокумент23 страницыLTE FDD Cluster DT - Analysis ReportAnonymous 0d9mC0OaxEОценок пока нет
- LAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1Документ25 страницLAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1assaОценок пока нет
- PMIC System HW-Validation EngineerДокумент3 страницыPMIC System HW-Validation EngineerSai KrishnaОценок пока нет
- 8 DtekДокумент5 страниц8 DtekAlexander WieseОценок пока нет
- High-Power N-Channel MOSFET TransistorДокумент2 страницыHigh-Power N-Channel MOSFET TransistorSaito OtiasОценок пока нет
- Spinner Air Traffic Control: Superior Rotary Joints For ATCДокумент60 страницSpinner Air Traffic Control: Superior Rotary Joints For ATChennrynsОценок пока нет
- BSc Engineering Degree UEE403 AnswersДокумент16 страницBSc Engineering Degree UEE403 AnswersNipuna Lakmal WeerakkodyОценок пока нет
- NNH4-65C-R6-V2: Electrical SpecificationsДокумент4 страницыNNH4-65C-R6-V2: Electrical SpecificationsDavid Angulo EsguerraОценок пока нет
- Hcia Lte GeralДокумент48 страницHcia Lte Geralvictor kudidissaОценок пока нет
- 0651 24 System 10 Generic Manual 09 18Документ57 страниц0651 24 System 10 Generic Manual 09 18Siva Raman MurugesanОценок пока нет
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsДокумент8 страницGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjОценок пока нет
- Home Power Magazine - Wind Power BasicsДокумент9 страницHome Power Magazine - Wind Power BasicsradurusОценок пока нет
- Introduction to PLC Programming LanguagesДокумент17 страницIntroduction to PLC Programming LanguagesBandi vennelaОценок пока нет
- Method of Statement For MotorsДокумент14 страницMethod of Statement For Motorskamil100% (4)