Вам также может понравиться
- Broschuere Perfekt in Schweissers Hand en Aufl3 DSДокумент5 страницBroschuere Perfekt in Schweissers Hand en Aufl3 DSRadu RusОценок пока нет
- JDSW43A-USB MACH3 (Red) PDFДокумент39 страницJDSW43A-USB MACH3 (Red) PDFTri SetiaОценок пока нет
- Dan Foss VLTДокумент214 страницDan Foss VLTVictor A DiazОценок пока нет
- Minichiller HP IOM MAC070CДокумент28 страницMinichiller HP IOM MAC070CLeopoldo Godinez Hernandez100% (2)
- B Lavamat 52630 Lavamat 54630 en 36 A5Документ36 страницB Lavamat 52630 Lavamat 54630 en 36 A5macruloОценок пока нет
- Myplasm CNC System: Operating ManualДокумент33 страницыMyplasm CNC System: Operating ManualAnders Sttebins GraciusОценок пока нет
- CZ Slavia 634 ReviewДокумент3 страницыCZ Slavia 634 ReviewzeniekОценок пока нет
- EC300 User Manual V2-NvcncДокумент24 страницыEC300 User Manual V2-NvcncJacpro Automation SacОценок пока нет
- Mach3 USB Motion Controller UC300 User's Manual: The Version of 20180925Документ23 страницыMach3 USB Motion Controller UC300 User's Manual: The Version of 20180925Juan Carlos Bernal GarciaОценок пока нет
- EC500 User Manual V2Документ24 страницыEC500 User Manual V2CleytonBronoskiОценок пока нет
- UC300 User Manual V2Документ22 страницыUC300 User Manual V2Free RdpОценок пока нет
- DDCS Expert User's Manual V1 (Part1)Документ82 страницыDDCS Expert User's Manual V1 (Part1)เปี๊ยก คนเดิมОценок пока нет
- DDCS V3.1 Manual V3 - EnglishДокумент84 страницыDDCS V3.1 Manual V3 - EnglishJosh100% (4)
- DDCS Expert User's Manual V1-已压缩Документ137 страницDDCS Expert User's Manual V1-已压缩andréОценок пока нет
- DDCS V4.1 Users Manual in English V1Документ89 страницDDCS V4.1 Users Manual in English V1pelebotiniОценок пока нет
- DDCS V41 User's Manual in English V1 20220914Документ92 страницыDDCS V41 User's Manual in English V1 20220914geraldalara209Оценок пока нет
- Manual Ezi-Servo Mini EngДокумент26 страницManual Ezi-Servo Mini Enghungnguyenok00Оценок пока нет
- Name: Mock - Up Wiring Plan Date: Grade & Section: Signed byДокумент4 страницыName: Mock - Up Wiring Plan Date: Grade & Section: Signed byAnne Loraine PagkalinawanОценок пока нет
- X Trail T30 T31 T32Документ10 страницX Trail T30 T31 T32Nivash Dhespal SinghОценок пока нет
- Trees HandoutДокумент51 страницаTrees Handouttesi kolikoОценок пока нет
- UntitledДокумент1 страницаUntitleddelanuezОценок пока нет
- Eziservo STДокумент40 страницEziservo STngtuandatdrvОценок пока нет
- Monthly Goal Monthly Log: MON TUE WED THU FRI 1Документ1 страницаMonthly Goal Monthly Log: MON TUE WED THU FRI 1신희준Оценок пока нет
- Planing Recruitment - InterviewДокумент4 страницыPlaning Recruitment - Interviewlale ariniagitОценок пока нет
- 6 Slides-Ggplot2 Part1Документ27 страниц6 Slides-Ggplot2 Part1Ashwani KumarОценок пока нет
- Original PDFДокумент2 страницыOriginal PDFmaxalves77Оценок пока нет
- Ejemplo de UsoДокумент13 страницEjemplo de UsoCristian Daniel Quiroz MorenoОценок пока нет
- Seat Ibiza Cjenovnik My21 CGДокумент4 страницыSeat Ibiza Cjenovnik My21 CGDejan TodorovićОценок пока нет
- Manual S-SERVOII ENGДокумент60 страницManual S-SERVOII ENGavv81419Оценок пока нет
- Data Visualization With Ggplot2: Sca!er PlotsДокумент54 страницыData Visualization With Ggplot2: Sca!er PlotsSxk 333Оценок пока нет
- Freebie - A4 Portrait 5T CoolДокумент18 страницFreebie - A4 Portrait 5T CoolbarbОценок пока нет
- STAT 432: Basics of Statistical Learning: Tree and Random ForestsДокумент54 страницыSTAT 432: Basics of Statistical Learning: Tree and Random ForestsRichard AdhyaputraОценок пока нет
- 設計講座-串列設計基本功 I2C介面之線路實務Документ7 страниц設計講座-串列設計基本功 I2C介面之線路實務billОценок пока нет
- Visual Perceptual Training BMAMДокумент20 страницVisual Perceptual Training BMAMAabidah Ab GhaniОценок пока нет
- DIP Switch (Rotary Type) A6AДокумент4 страницыDIP Switch (Rotary Type) A6AMuhamad PriyatnaОценок пока нет
- Camera User Guide: EnglishДокумент186 страницCamera User Guide: Englishjruben4Оценок пока нет
- Canons50man PDFДокумент186 страницCanons50man PDFesjavierОценок пока нет
- Black Edition: Touring Style+ TOP Premium+ Top+Документ2 страницыBlack Edition: Touring Style+ TOP Premium+ Top+Nazarii HedzykОценок пока нет
- Your Gas Mixture - Just The Way You Need It To BeДокумент16 страницYour Gas Mixture - Just The Way You Need It To BeJimenena2Оценок пока нет
- Model Visualisation: (With Ggplot2)Документ25 страницModel Visualisation: (With Ggplot2)api-14814295Оценок пока нет
- 5 Regression PDFДокумент115 страниц5 Regression PDFhawk91Оценок пока нет
- K-Means RKДокумент43 страницыK-Means RKPrince JaiswalОценок пока нет
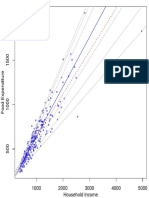
- 1000 2000 3000 4000 5000 Household IncomeДокумент1 страница1000 2000 3000 4000 5000 Household IncomerojasleopОценок пока нет
- TV - Buyers Guide - HAIERДокумент95 страницTV - Buyers Guide - HAIERBibhuti Jha100% (3)
- Biostatistics of HKU MMEDSC Session2handoutprint3Документ23 страницыBiostatistics of HKU MMEDSC Session2handoutprint3Xin chao LiОценок пока нет
- Ggplot2 Course2 ch5 SlidesДокумент23 страницыGgplot2 Course2 ch5 SlidesSxk 333Оценок пока нет
- Mutant Year Zero - Zone Log PDFДокумент2 страницыMutant Year Zero - Zone Log PDFMasis 'Ara' ShahbaziansОценок пока нет
- Zone LogДокумент2 страницыZone LogNicolás López CorreaОценок пока нет
- Mutant Year Zero - Zone LogДокумент2 страницыMutant Year Zero - Zone LogScott CrumpОценок пока нет
- Coordinates Terrain Rot Level Threat CommentДокумент2 страницыCoordinates Terrain Rot Level Threat Commentfrsayhe5tueayher6uОценок пока нет
- Zone Log PDFДокумент2 страницыZone Log PDFКостя СмоляковОценок пока нет
- Zone Log PDFДокумент2 страницыZone Log PDFКостя СмоляковОценок пока нет
- Zone LogДокумент2 страницыZone LogNicolas GalzyОценок пока нет
- Lectures Machine LearningДокумент205 страницLectures Machine LearningGuilherme MartheОценок пока нет
- LocalGLMnet: A Deep Learning Architecture For ActuariesДокумент35 страницLocalGLMnet: A Deep Learning Architecture For Actuariespapatest123Оценок пока нет
- Math 141: Lecture 18: Correlation and RegressionДокумент26 страницMath 141: Lecture 18: Correlation and RegressionCory DimagibaОценок пока нет
- Products For PromotionДокумент3 страницыProducts For PromotionVania Diego Velasco RiveraОценок пока нет
- 49dd120 Mazda CX 30Документ2 страницы49dd120 Mazda CX 30biggenaОценок пока нет
- K-Means Vs Mini Batch K-Means: A ComparisonДокумент12 страницK-Means Vs Mini Batch K-Means: A Comparisonrather AarifОценок пока нет
- South Africa’s Renewable Energy IPP Procurement ProgramОт EverandSouth Africa’s Renewable Energy IPP Procurement ProgramОценок пока нет
- Topic Wise MCQ of Operating SystemsДокумент27 страницTopic Wise MCQ of Operating SystemsRuba NiaziОценок пока нет
- Solid Edge Mold Tooling ST7Документ1 страницаSolid Edge Mold Tooling ST7mihalyОценок пока нет
- NE MotoHawk Resource Guide PDFДокумент105 страницNE MotoHawk Resource Guide PDFMarkus SenojОценок пока нет
- Security Mechanisms, Network Security Model Class-L3Документ12 страницSecurity Mechanisms, Network Security Model Class-L3Sidhant GuptaОценок пока нет
- Fire Control SystemДокумент40 страницFire Control SystemwilliamОценок пока нет
- Venom VB-303: User ManualДокумент32 страницыVenom VB-303: User ManualMmОценок пока нет
- SAP HCM Course ContentДокумент2 страницыSAP HCM Course Contentbilalch0906Оценок пока нет
- PIC32-WEB Development Board Users Manual: All Boards Produced by Olimex Are ROHS CompliantДокумент20 страницPIC32-WEB Development Board Users Manual: All Boards Produced by Olimex Are ROHS CompliantFernando Piedade100% (3)
- Wattio Mobilemanual Gate EsДокумент17 страницWattio Mobilemanual Gate EsalienstrikesОценок пока нет
- Optimpid: A Matlab Interface For Optimum Pid Controller DesignДокумент6 страницOptimpid: A Matlab Interface For Optimum Pid Controller DesignKARKAR NORAОценок пока нет
- FSD Release Notes GBДокумент26 страницFSD Release Notes GBGustavo Roberto GustavoОценок пока нет
- 4 TlsДокумент24 страницы4 TlsnshivegowdaОценок пока нет
- Embedded Systems Research Topics Ideas T4TutorialsДокумент12 страницEmbedded Systems Research Topics Ideas T4TutorialsSummer TriangleОценок пока нет
- Embedded Systems We Are Using in Daily LifeДокумент2 страницыEmbedded Systems We Are Using in Daily Lifehafeez ahmedОценок пока нет
- Fastiron Ethernet Switch Platform and Layer 2 Switching: Configuration GuideДокумент450 страницFastiron Ethernet Switch Platform and Layer 2 Switching: Configuration Guidemukil rОценок пока нет
- KB - LTS Connect V4.11Документ12 страницKB - LTS Connect V4.11Mirco MorónОценок пока нет
- U.are.U SDK Developer GuideДокумент94 страницыU.are.U SDK Developer GuideFlorante ReguisОценок пока нет
- Usb Cam LogДокумент4 страницыUsb Cam LogJuan Agustin Bravo LeonОценок пока нет
- Rubrik and GDPR Technical Reference PDFДокумент11 страницRubrik and GDPR Technical Reference PDFShweta NitnawareОценок пока нет
- MRK1828-04-EN-00 Guide To Setting Up Access Permissions in The MACДокумент16 страницMRK1828-04-EN-00 Guide To Setting Up Access Permissions in The MACMiguel Zuniga MarconiОценок пока нет
- Indy Soap Tutorial ViewДокумент9 страницIndy Soap Tutorial Viewsatheeshcse2005Оценок пока нет
- Auslogics Windows Slimmer LicenseДокумент3 страницыAuslogics Windows Slimmer LicensemahamedОценок пока нет
- Release Notes PrnconДокумент5 страницRelease Notes PrnconConcordia EdicОценок пока нет
- Database Interview QuestionsДокумент8 страницDatabase Interview Questionskrk296100% (2)
- Question 3 (1 Point)Документ27 страницQuestion 3 (1 Point)jacksonОценок пока нет
- Albay Emergency Response and Report ToolДокумент17 страницAlbay Emergency Response and Report ToolTamim IslamОценок пока нет
- SIMCom 3G MQTT Application Note V1.00Документ18 страницSIMCom 3G MQTT Application Note V1.00Sijeo PhilipОценок пока нет
- Lesson 2 - The Input-Process-Output (IPO)Документ24 страницыLesson 2 - The Input-Process-Output (IPO)Maverik LansangОценок пока нет
- Cisco IOS Cisco XR Difference GuideДокумент40 страницCisco IOS Cisco XR Difference GuideHareshankar KaunteyОценок пока нет
- NOS - AdminGuide - v410 - SAN Switches VDX6300 PDFДокумент724 страницыNOS - AdminGuide - v410 - SAN Switches VDX6300 PDFamunoz81Оценок пока нет