Вам также может понравиться
- Tecnología de Buses de CampoДокумент5 страницTecnología de Buses de Campoalienarandas123Оценок пока нет
- Describa Las Principales Características de Los Buses de CampoДокумент15 страницDescriba Las Principales Características de Los Buses de CampoAndres MedinaОценок пока нет
- Redes de Comunicación IndustrialДокумент32 страницыRedes de Comunicación IndustrialLuis Carlos Bacca OcampoОценок пока нет
- Bus de CampoДокумент13 страницBus de CampoEfrainОценок пока нет
- Buses de CampoДокумент7 страницBuses de CampoRafaela Parra100% (1)
- Estandares WAN y Tipos de Enlaces ConmutadosДокумент10 страницEstandares WAN y Tipos de Enlaces ConmutadosNeverdie Sergio100% (1)
- Unidad 1 Comunicaciones y Redes IndustrialesДокумент42 страницыUnidad 1 Comunicaciones y Redes IndustrialesChelito De Jesus Villalobos Gtz100% (1)
- Funcionamiento STPДокумент4 страницыFuncionamiento STPNubia Bello AmayaОценок пока нет
- Unidad 2 Redes de ComputadorasДокумент61 страницаUnidad 2 Redes de ComputadorasengengermОценок пока нет
- Protocolo Modbus RTU/TCPДокумент15 страницProtocolo Modbus RTU/TCPJUAN PABLO SANABRIA VELANDIAОценок пока нет
- Paper 5 Interfaz RS232 Vs RS485Документ3 страницыPaper 5 Interfaz RS232 Vs RS485Scarlet RoseОценок пока нет
- ISP Proveedores de Servicio de InternetДокумент13 страницISP Proveedores de Servicio de InternetAstin R. MartinezОценок пока нет
- Frame RelayДокумент37 страницFrame RelayEduardo Ortiz de LandazuryОценок пока нет
- OPC Características, Perspectivas, Problemas e Introducción Al OPC UAДокумент3 страницыOPC Características, Perspectivas, Problemas e Introducción Al OPC UAjuancamilosoОценок пока нет
- Sistemas de Control DistribuidoДокумент28 страницSistemas de Control DistribuidoDenizetОценок пока нет
- Topologia BusДокумент4 страницыTopologia BusSaraaHy SerraaNo100% (2)
- Historia Del Modelo OSIДокумент3 страницыHistoria Del Modelo OSITivisay RubianoОценок пока нет
- Ethway y Bus As-IДокумент18 страницEthway y Bus As-IRodrigo Gerardo Quispe FarfánОценок пока нет
- Historia de Las RedesДокумент15 страницHistoria de Las Redesbabybratz283771100% (4)
- Introducción A EthernetДокумент14 страницIntroducción A Ethernetchar82cositaОценок пока нет
- RJ-45 y RJ-11Документ5 страницRJ-45 y RJ-11ponchoandradeeОценок пока нет
- Cable Null Módem permite comunicación sin módemsДокумент1 страницаCable Null Módem permite comunicación sin módemsDanik JiménezОценок пока нет
- Automatización Industrial. Interfaz Hombre-Máquina: 1 Human Machine Interface - HMIДокумент35 страницAutomatización Industrial. Interfaz Hombre-Máquina: 1 Human Machine Interface - HMIRodrigoОценок пока нет
- Jerarquía de BusesДокумент3 страницыJerarquía de BusesXaggy Krauser ContrerasОценок пока нет
- Mallas de TierraДокумент15 страницMallas de TierraDavidSaulMendezОценок пока нет
- Aplicación de Las Redes Conmutadas Por CircuitosДокумент11 страницAplicación de Las Redes Conmutadas Por CircuitosLob Alzajud LkisОценок пока нет
- Diseño de Red IndustrialДокумент28 страницDiseño de Red IndustrialRodman TeranОценок пока нет
- 4VPNДокумент14 страниц4VPNGerardo Mandujano0% (1)
- Buses de campo industriales: tipos, ventajas y desventajasДокумент9 страницBuses de campo industriales: tipos, ventajas y desventajasNogal SaleОценок пока нет
- Comunicación Cliente-ServidorДокумент10 страницComunicación Cliente-ServidorCristian Javier GarcíaОценок пока нет
- Guia Estándares de SceДокумент6 страницGuia Estándares de Scecamiler10100% (2)
- Cuadro Comparativo OSI y TCPДокумент6 страницCuadro Comparativo OSI y TCPBryan Enrique Caldera RuizОценок пока нет
- Tipos de Dispositivos InalambricosДокумент3 страницыTipos de Dispositivos InalambricosAnonymous nGu6rtOОценок пока нет
- Cuestionario Unidad 4 Lenguajes de SimulaciónДокумент4 страницыCuestionario Unidad 4 Lenguajes de SimulaciónCarlos CruzОценок пока нет
- Trabajo de Red SubterraneaДокумент13 страницTrabajo de Red Subterraneamirllana cayamaОценок пока нет
- Tipos de CableДокумент4 страницыTipos de CableBLUETOOTH SGD100% (2)
- Puertos y Buses de Comunicación para MicrocontroladoresДокумент3 страницыPuertos y Buses de Comunicación para MicrocontroladoresJOSE ALFREDO AMARO OLAYAОценок пока нет
- Sistema de Control Distribuido - Nuñez QuispeДокумент12 страницSistema de Control Distribuido - Nuñez QuispeAmanda Larson100% (1)
- Sistema EmbebidoДокумент7 страницSistema EmbebidoAnuar Felipe Molina Isidoro100% (1)
- Modelo de Referencia OSIДокумент13 страницModelo de Referencia OSIturistologovzla2010100% (1)
- Tecnología de Transporte PDH, SDH, OTNДокумент12 страницTecnología de Transporte PDH, SDH, OTNGrace Romualdo LazaroОценок пока нет
- La Capa de Red de InternetДокумент9 страницLa Capa de Red de Internethectorhcch100% (1)
- 1.5 Interface GpibДокумент39 страниц1.5 Interface GpibDany CAОценок пока нет
- 3.1 Dispositivos de Capa FísicaДокумент13 страниц3.1 Dispositivos de Capa FísicaJessica Luciano De La OОценок пока нет
- Diferencia Entre Multiplexación y ConmutaciónДокумент5 страницDiferencia Entre Multiplexación y ConmutaciónhectorgoitiaОценок пока нет
- Buses de Comunicación IndustrialДокумент9 страницBuses de Comunicación IndustrialjoseОценок пока нет
- Profibus Capa Fisica en 50170Документ7 страницProfibus Capa Fisica en 50170Sentimiento Amor EsperanzaОценок пока нет
- Clasificación de direcciones IP y rangosДокумент3 страницыClasificación de direcciones IP y rangosJuan Antonio Plascencia0% (1)
- El Instituto Americano de Estándares NacionalesДокумент5 страницEl Instituto Americano de Estándares NacionalesCmjg GMОценок пока нет
- Apuntes EnsambladorДокумент60 страницApuntes EnsambladorgatmaedОценок пока нет
- 6 Protocolos Comunicación Datos IndustrialesДокумент14 страниц6 Protocolos Comunicación Datos IndustrialesGabrielaОценок пока нет
- Ethenet IEEE 802 3Документ19 страницEthenet IEEE 802 3Moises FabroОценок пока нет
- Cat6 UTP vs STP: Ventajas y desventajas de los cables de par trenzadoДокумент8 страницCat6 UTP vs STP: Ventajas y desventajas de los cables de par trenzadoJessica Soliz CatariОценок пока нет
- WifiДокумент11 страницWifiWhip LashОценок пока нет
- Act2 PDFДокумент5 страницAct2 PDFAlex Calvo HernándezОценок пока нет
- Introducción PLCДокумент12 страницIntroducción PLCRoberto AvilaОценок пока нет
- RSTPДокумент10 страницRSTPreynaldorxОценок пока нет
- Buses de CampoДокумент77 страницBuses de CampoFeña Endeudado Spectraeum100% (1)
- Servicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaОт EverandServicio de Mensajes Cortos (SMS) el Mercado Telefónico de EspañaОценок пока нет
- ArranqueДокумент4 страницыArranquedavloyОценок пока нет
- Sistemas de Manufactura FlexibleДокумент12 страницSistemas de Manufactura FlexibledavloyОценок пока нет
- Sistemas de Manufactura FlexibleДокумент12 страницSistemas de Manufactura FlexibledavloyОценок пока нет
- Convertidor Analógico-DigitalДокумент2 страницыConvertidor Analógico-DigitaldavloyОценок пока нет
- Conceptos de CalidadДокумент7 страницConceptos de CalidaddavloyОценок пока нет
- Sistemas de Manufactura FlexibleДокумент12 страницSistemas de Manufactura FlexibledavloyОценок пока нет
- Sistemas de Manufactura FlexibleДокумент12 страницSistemas de Manufactura FlexibledavloyОценок пока нет
- Equipos de Alto RendimientoДокумент4 страницыEquipos de Alto RendimientodavloyОценок пока нет
- Capítulo IДокумент13 страницCapítulo IdavloyОценок пока нет
- Teoría de la Relatividad y postulados de EinsteinДокумент11 страницTeoría de la Relatividad y postulados de EinsteindavloyОценок пока нет
- Relación energía-calor bombillosДокумент7 страницRelación energía-calor bombillosdavloyОценок пока нет
- Microsoft ProjectДокумент6 страницMicrosoft ProjectdavloyОценок пока нет
- Se SolicitaДокумент1 страницаSe SolicitadavloyОценок пока нет
- 6.7 Sentencias de Control (WHILE-For)Документ1 страница6.7 Sentencias de Control (WHILE-For)davloyОценок пока нет
- 6.8 Sentencias de Control (SWITCH-CASE)Документ2 страницы6.8 Sentencias de Control (SWITCH-CASE)davloyОценок пока нет
- Sujeto de DerechoДокумент7 страницSujeto de DerechodavloyОценок пока нет
- 6.6 Sentencias de Control (if-TheN-ELSE)Документ1 страница6.6 Sentencias de Control (if-TheN-ELSE)davloyОценок пока нет
- Perro perdido con recompensaДокумент2 страницыPerro perdido con recompensadavloyОценок пока нет
- Guia 4Документ11 страницGuia 4Jose O CuellarОценок пока нет
- Como Formatear Un PC Con Placa ASRockДокумент4 страницыComo Formatear Un PC Con Placa ASRockEdgardo Garcés MontesОценок пока нет
- Boletin 64 La Carretera Lima CallaoДокумент4 страницыBoletin 64 La Carretera Lima CallaoWilliams Quispe RamosОценок пока нет
- Formulario - Inec 2023Документ4 страницыFormulario - Inec 2023Galo MarmolejoОценок пока нет
- Diseño de miembros sometidos a carga axialДокумент13 страницDiseño de miembros sometidos a carga axialrosa lopezОценок пока нет
- Uso de La Bioingenieria para El Control de Erosion Severa PDFДокумент57 страницUso de La Bioingenieria para El Control de Erosion Severa PDFhenryОценок пока нет
- Memoria Descriptiva - Carlos Cespedes UrdaniviaДокумент17 страницMemoria Descriptiva - Carlos Cespedes Urdaniviajmanuel20Оценок пока нет
- Active Directory Rights Management Services (AD RMS)Документ3 страницыActive Directory Rights Management Services (AD RMS)agustinsolimanoОценок пока нет
- PM - EQUIPOS (Creación de Equipos)Документ162 страницыPM - EQUIPOS (Creación de Equipos)Helen HeckОценок пока нет
- 2005-1 La Bóveda de Hormigón Del Club Táchira en CaracasДокумент12 страниц2005-1 La Bóveda de Hormigón Del Club Táchira en CaracasEDITORIAL STARBOOKS100% (1)
- Introduccion Entidades DTDXMLДокумент9 страницIntroduccion Entidades DTDXMLzotto159xОценок пока нет
- Organización Del Proceso Arquitectónico IiДокумент3 страницыOrganización Del Proceso Arquitectónico IianloghsОценок пока нет
- 1.clase Ipologias Formales PDFДокумент17 страниц1.clase Ipologias Formales PDFrubenОценок пока нет
- Absorción de agua en bloques huecos de hormigónДокумент11 страницAbsorción de agua en bloques huecos de hormigónAndree OrdóñezОценок пока нет
- Diseño de Estribos PuentesДокумент10 страницDiseño de Estribos PuentesElliot HOОценок пока нет
- Usos Del LadrilloДокумент8 страницUsos Del Ladrillojoel quincho ramosОценок пока нет
- Distinguir Entre Fisuras y Grietas Permitirá Prevenir Daños MayoresДокумент12 страницDistinguir Entre Fisuras y Grietas Permitirá Prevenir Daños MayoresEdgar Raddy Carrasco OrdoñezОценок пока нет
- MODELO - EXAMEN TECNICAS Y MEDIOS ARTISTICOS - Curso - Virtual. - 2021Документ5 страницMODELO - EXAMEN TECNICAS Y MEDIOS ARTISTICOS - Curso - Virtual. - 2021juanОценок пока нет
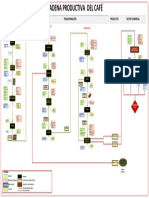
- Cadena productiva del caféДокумент1 страницаCadena productiva del caféYassneal Odamar67% (3)
- Huellas de La Infancia en El Impulso Creativo - Clara Eslava CabanellasДокумент466 страницHuellas de La Infancia en El Impulso Creativo - Clara Eslava CabanellasDavid RodriguezОценок пока нет
- Gestión de redes: preguntas y respuestas sobre conceptos básicosДокумент9 страницGestión de redes: preguntas y respuestas sobre conceptos básicosAmilcar Ernesto AguirreОценок пока нет
- Guía Trámites Visado PlanosДокумент10 страницGuía Trámites Visado PlanosMayer Alexis Soto VarelaОценок пока нет
- Temario de HistoriaДокумент42 страницыTemario de Historiamaurisio camachoОценок пока нет
- Arquitectura y Conceptos de Función EstéticaДокумент2 страницыArquitectura y Conceptos de Función EstéticaDébora Jimena Castillo HerrarteОценок пока нет
- Guía básica WordДокумент3 страницыGuía básica WordJunior EfraОценок пока нет
- TrelloДокумент11 страницTrellojpambabay682313Оценок пока нет
- Socavacion en Estribos y PilaresДокумент38 страницSocavacion en Estribos y PilaresDavid DurandОценок пока нет
- Herramientas o Instrumentos para Realizar El Dibujo TecnicoДокумент4 страницыHerramientas o Instrumentos para Realizar El Dibujo TecnicoXtrem NetОценок пока нет
- Tema 27-MG - Sostenimiento de MinasДокумент99 страницTema 27-MG - Sostenimiento de MinasLuis Edgar Alarcón Aliaga100% (8)
- Acabados en Concreto Arquitectonico Tecnica Del AbujardadoДокумент12 страницAcabados en Concreto Arquitectonico Tecnica Del AbujardadoCamilo FernándezОценок пока нет