Вам также может понравиться
- Distributed Process Control ReportОт EverandDistributed Process Control ReportОценок пока нет
- Input Shaping Control of DoublePendulum Bridge Crane OscillationsДокумент7 страницInput Shaping Control of DoublePendulum Bridge Crane OscillationsalexlenceОценок пока нет
- Motion Control ReportОт EverandMotion Control ReportРейтинг: 4 из 5 звезд4/5 (1)
- Design of A Teleoperation Controller For An Underwater ManipulatorДокумент6 страницDesign of A Teleoperation Controller For An Underwater Manipulatordrymon_159Оценок пока нет
- Adaptive Backstepping Sliding Mode Control For Quadrotor UAVДокумент13 страницAdaptive Backstepping Sliding Mode Control For Quadrotor UAVAhtisham195Оценок пока нет
- Discrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismДокумент10 страницDiscrete-Time Variable Structure Controller With A Decoupled Disturbance Compensator and Its Application To A CNC ServomechanismFernando OrnelasОценок пока нет
- 10 1002@asjc 2021Документ11 страниц10 1002@asjc 2021hamidamza4Оценок пока нет
- IEEE IndusElec2009 PWMconvertersДокумент12 страницIEEE IndusElec2009 PWMconvertersVinícius BessaОценок пока нет
- Exploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewДокумент10 страницExploring Observer-Based Sliding Mode Control For Nonlinear and Uncertain Systems A Comprehensive ReviewInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- PID Tuning For Cascade Control System DesignДокумент4 страницыPID Tuning For Cascade Control System DesignILham FadhillОценок пока нет
- Dokumen - Tips - Novar Controller Brochure PDFДокумент8 страницDokumen - Tips - Novar Controller Brochure PDFArma ArzuОценок пока нет
- SAFOP Report Recommendations - SampleДокумент21 страницаSAFOP Report Recommendations - Samplelyndon lerias100% (2)
- Wang 2011Документ5 страницWang 2011ArunavaОценок пока нет
- Borello Electrohydraulic ServovalvesДокумент12 страницBorello Electrohydraulic ServovalvesOnline 4-lifeОценок пока нет
- Chattering-Free Neuro-Sliding Mode Control of 2-DOF Planar Parallel ManipulatorsДокумент15 страницChattering-Free Neuro-Sliding Mode Control of 2-DOF Planar Parallel ManipulatorsQuyết Nguyễn CôngОценок пока нет
- Output-Feedback Control of Container Cranes: A Comparative AnalysisДокумент16 страницOutput-Feedback Control of Container Cranes: A Comparative AnalysisjavbejaranoОценок пока нет
- A New Placement and Integration Method of UPQC To Improve The Power Quality in DG NetworkДокумент6 страницA New Placement and Integration Method of UPQC To Improve The Power Quality in DG NetworkDr. Gollapalli NareshОценок пока нет
- PS Lab PPT 07thdecemberДокумент21 страницаPS Lab PPT 07thdecemberpriyanshum230825eeОценок пока нет
- Journal of Robotic Systems - 2000 - Constantinescu - Smooth and Time Optimal Trajectory Planning For IndustrialДокумент17 страницJournal of Robotic Systems - 2000 - Constantinescu - Smooth and Time Optimal Trajectory Planning For Industrialibrahimgulay15Оценок пока нет
- Modeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsДокумент10 страницModeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsVictor Julián Fernández CarrazanaОценок пока нет
- (En Revisión) 3D - Finite - Time - Tracking For Coordinated Tasks With Unmanned Underwater VehiclesДокумент19 страниц(En Revisión) 3D - Finite - Time - Tracking For Coordinated Tasks With Unmanned Underwater VehiclesMilton AlvaradoОценок пока нет
- 5Документ1 страница5paxesicrado-3649Оценок пока нет
- A Novel Energy-Coupling-Based Control Method For Double-Pendulum Overhead Cranes With Initial Control Force ConstraintДокумент13 страницA Novel Energy-Coupling-Based Control Method For Double-Pendulum Overhead Cranes With Initial Control Force ConstraintVictor Julián Fernández CarrazanaОценок пока нет
- Oea 2 10 190011 1Документ8 страницOea 2 10 190011 1Nicolas RodriguezОценок пока нет
- Icma09 047 PDFДокумент6 страницIcma09 047 PDFVignesh RamakrishnanОценок пока нет
- Stochastic Speed Governor Based On The Generalized Minimum Variance ControllerДокумент1 страницаStochastic Speed Governor Based On The Generalized Minimum Variance Controllerrodrigo_trentiniОценок пока нет
- Venkat Es An 2014Документ7 страницVenkat Es An 2014rohit guptaОценок пока нет
- Gain-Scheduled Reusable Launch Vehicle Attitude Controller DesignДокумент5 страницGain-Scheduled Reusable Launch Vehicle Attitude Controller DesignbennyОценок пока нет
- An Intelligent Recoil Controller For Ri - 2022 - International Journal of NavalДокумент11 страницAn Intelligent Recoil Controller For Ri - 2022 - International Journal of NavalNguyen Phuc LinhОценок пока нет
- Visakh SeminarДокумент20 страницVisakh SeminariagooОценок пока нет
- Friction Compensation A Double Inverted Pendulum: Stons, CT FST, P.OДокумент6 страницFriction Compensation A Double Inverted Pendulum: Stons, CT FST, P.Oمحمد المهندسОценок пока нет
- George Warship 2000Документ9 страницGeorge Warship 2000MostafaSaidMohamedОценок пока нет
- Design and Implementation of Integral Sliding-Mode Control On An Underactuated Two-Wheeled Mobile RobotДокумент11 страницDesign and Implementation of Integral Sliding-Mode Control On An Underactuated Two-Wheeled Mobile RobotTimothy FieldsОценок пока нет
- Final VersionДокумент6 страницFinal Versionmonse369Оценок пока нет
- Droop Control in LV-gridsДокумент6 страницDroop Control in LV-gridsEvellyne ChrisОценок пока нет
- An Analysis Nomoto Gain and Norbin Parameter On Ship Turning ManeuverДокумент8 страницAn Analysis Nomoto Gain and Norbin Parameter On Ship Turning ManeuverJARELH ELIAS GALDOS BARRIOSОценок пока нет
- Tuning of RLS-Active Vibration Controller Using Genetic AlgorithmДокумент6 страницTuning of RLS-Active Vibration Controller Using Genetic AlgorithmAmeen ShaikhОценок пока нет
- Multi Variable ControlsДокумент17 страницMulti Variable ControlsJivashiniBalasupurManiamОценок пока нет
- Nayak 2010Документ4 страницыNayak 2010Ashley SureshОценок пока нет
- Dewa Asset ManagemntДокумент7 страницDewa Asset ManagemntDC VashistОценок пока нет
- Fault-Tolerant Control of An Electro-Hydraulic Servo Axes With A Duplex-Valve-SystemДокумент9 страницFault-Tolerant Control of An Electro-Hydraulic Servo Axes With A Duplex-Valve-SystembenОценок пока нет
- Dr. Jean Koclas Ecole Polytechnique, Montreal, Canada Page6-1 Reactor Control and Simulation Adjuster Rod Control (CBC)Документ4 страницыDr. Jean Koclas Ecole Polytechnique, Montreal, Canada Page6-1 Reactor Control and Simulation Adjuster Rod Control (CBC)Ente Bliss OnixОценок пока нет
- IO-Link: Simple, Seamless, EfficientДокумент2 страницыIO-Link: Simple, Seamless, EfficientVenciguerraОценок пока нет
- Process Control Performance - Benefits Lambda TuningДокумент9 страницProcess Control Performance - Benefits Lambda TuningKumarОценок пока нет
- Ias 1999 801662Документ8 страницIas 1999 801662aasfklОценок пока нет
- Circuit Graphics L1850 v15Документ16 страницCircuit Graphics L1850 v15Josu ReisОценок пока нет
- An Itae Optimal Sliding Mode Controller For Systems With Control Signal and Velocity LimitationsДокумент9 страницAn Itae Optimal Sliding Mode Controller For Systems With Control Signal and Velocity LimitationsMIKS DARKОценок пока нет
- Model Identification For Dragline Swing Assist Control DesignДокумент6 страницModel Identification For Dragline Swing Assist Control DesignMateen MahdiОценок пока нет
- Linear State-Feedback Control of A Boost Converter For Large-Signal StabilityДокумент7 страницLinear State-Feedback Control of A Boost Converter For Large-Signal StabilityAMIR SOHAILОценок пока нет
- Swigup Acrobot Spong PDFДокумент7 страницSwigup Acrobot Spong PDFJ.a. Tenshi ExecutionerОценок пока нет
- Back SteppingДокумент7 страницBack Steppinggigapis845Оценок пока нет
- Analytical Methods For The Development of Reynolds-Stress Closures in TurbulenceДокумент52 страницыAnalytical Methods For The Development of Reynolds-Stress Closures in Turbulenceyaser AlahmadiОценок пока нет
- Power Evacuation ReportДокумент127 страницPower Evacuation Reportjitendra100% (1)
- Quadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterДокумент6 страницQuadrotor Aircraft Attitude Estimation and Control Based On Kalman FilterRifqi ZainОценок пока нет
- Shao 2021Документ10 страницShao 2021Mou KhalilОценок пока нет
- Sensorless Sliding Mode Control of Induction Motor Drives: AbstractДокумент6 страницSensorless Sliding Mode Control of Induction Motor Drives: AbstractSumithra BalakrishnanОценок пока нет
- 252 256 257 ServovalvesДокумент16 страниц252 256 257 Servovalvesabufct0Оценок пока нет
- Reactivity Control: 13.1 Module Overview 3 13.2 Module Objectives 3Документ32 страницыReactivity Control: 13.1 Module Overview 3 13.2 Module Objectives 3B. Anil KumarОценок пока нет
- Regulacija Pozicije, Brzine I Ubrzanja Aktuatora Korištenjem Optimalne Estimacije StanjaДокумент10 страницRegulacija Pozicije, Brzine I Ubrzanja Aktuatora Korištenjem Optimalne Estimacije Stanjabig horseОценок пока нет
- 8 - Viviani AltosoleДокумент14 страниц8 - Viviani AltosolehaujesОценок пока нет
- Lect 1Документ23 страницыLect 1Muhammad Hussain100% (1)
- Guidelines For AstraZeneca Vaccine - 7102Документ5 страницGuidelines For AstraZeneca Vaccine - 7102Muhammad Izhar AhmadОценок пока нет
- 305EMM Total Quality Management 2020/2021 Statistical Process Control Improvement Program and Quality Costing Submission Date 14 June 2021Документ4 страницы305EMM Total Quality Management 2020/2021 Statistical Process Control Improvement Program and Quality Costing Submission Date 14 June 2021Muhammad Hussain0% (1)
- Gas Engine FundamentalsДокумент13 страницGas Engine Fundamentalsherdin56Оценок пока нет
- 1 - HND QCF Propulsion Assignment 3 2011.2012Документ6 страниц1 - HND QCF Propulsion Assignment 3 2011.2012Muhammad HussainОценок пока нет
- 305EMM TQM 2021 AssesmentДокумент4 страницы305EMM TQM 2021 AssesmentMuhammad Hussain0% (2)
- Thermo 2, Assignment 1Документ4 страницыThermo 2, Assignment 1Muhammad HussainОценок пока нет
- Road Signs Test - Islamabad Traffic PoliceДокумент15 страницRoad Signs Test - Islamabad Traffic PoliceMuhammad Hussain100% (2)
- Gas Engine FundamentalsДокумент13 страницGas Engine Fundamentalsherdin56Оценок пока нет
- E-NTU Chart For A U Tube Heat ExchangerДокумент1 страницаE-NTU Chart For A U Tube Heat ExchangerMuhammad HussainОценок пока нет
- Road Signs - Islamabad Traffic PoliceДокумент25 страницRoad Signs - Islamabad Traffic PoliceMuhammad HussainОценок пока нет
- EM - Quiz No. 4 PDFДокумент3 страницыEM - Quiz No. 4 PDFMuhammad HussainОценок пока нет
- T1.1b Flow of Heat - Forced ConvectionДокумент17 страницT1.1b Flow of Heat - Forced ConvectionMuhammad HussainОценок пока нет
- Thermodynamics NotesДокумент32 страницыThermodynamics NotesMuhammad HussainОценок пока нет
- Thrust Vectored ControlДокумент38 страницThrust Vectored ControlMuhammad HussainОценок пока нет
- T1.1a Flow of Heat - Heat Transfer MechanismsДокумент12 страницT1.1a Flow of Heat - Heat Transfer MechanismsMuhammad HussainОценок пока нет
- Table Heat Exchanger FeaturesДокумент1 страницаTable Heat Exchanger FeaturesMuhammad HussainОценок пока нет
- Azu Etd 16348 Sip1 MДокумент112 страницAzu Etd 16348 Sip1 MMuhammad HussainОценок пока нет
- Lec Heat Exchanger SelectionДокумент2 страницыLec Heat Exchanger SelectionMuhammad HussainОценок пока нет
- LMTD Correction For U TubeДокумент1 страницаLMTD Correction For U TubeMuhammad HussainОценок пока нет
- How To Make Bomb PDFДокумент1 страницаHow To Make Bomb PDFMuhammad HussainОценок пока нет
- Ann PDFДокумент96 страницAnn PDFMuhammad HussainОценок пока нет
- EM - Quiz No. 4 PDFДокумент3 страницыEM - Quiz No. 4 PDFMuhammad HussainОценок пока нет
- Thrust Vectored ControlДокумент38 страницThrust Vectored ControlMuhammad HussainОценок пока нет
- Azu Etd 16348 Sip1 MДокумент112 страницAzu Etd 16348 Sip1 MMuhammad HussainОценок пока нет
- Thrust Vectored ControlДокумент38 страницThrust Vectored ControlMuhammad HussainОценок пока нет
- PS9Soln 2014Документ13 страницPS9Soln 2014Eddz Del Rosario RodriguezОценок пока нет
- NAFEMS3D BrochureДокумент4 страницыNAFEMS3D Brochuresuresh kumarОценок пока нет
- Uzbekistan Air Force & Air DefenceДокумент4 страницыUzbekistan Air Force & Air DefenceVVaasseem KhhaanОценок пока нет
- Glossary of Suspension Terms PDFДокумент10 страницGlossary of Suspension Terms PDFrobinОценок пока нет
- Al Montazah Palace - LG VRF IDUs - External Static PressureДокумент7 страницAl Montazah Palace - LG VRF IDUs - External Static PressureShappan Abd AllhaОценок пока нет
- Half Lite Stunter Building InstructionsДокумент37 страницHalf Lite Stunter Building InstructionsCarlos Manuel GonzálezОценок пока нет
- Advel ChobertДокумент8 страницAdvel Chobertccorp0089Оценок пока нет
- United States Patent: 73) Assignee Mcdonnell Douglas CorporationДокумент9 страницUnited States Patent: 73) Assignee Mcdonnell Douglas CorporationgorgiОценок пока нет
- Pelton Turbine Question AnswerДокумент8 страницPelton Turbine Question AnswerKamrul HasanОценок пока нет
- c115 Airplane Security ProceduresДокумент14 страницc115 Airplane Security ProceduresAirbus 320100% (1)
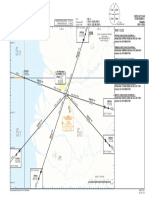
- STAR Runway 15 and 33 AMDT 69Документ1 страницаSTAR Runway 15 and 33 AMDT 69Marceline KОценок пока нет
- Arnold Analysis2 PDFДокумент147 страницArnold Analysis2 PDFColiseo SentosaОценок пока нет
- Mil PRF 81309FДокумент36 страницMil PRF 81309FPDDELUCAОценок пока нет
- Camber (Aerodynamics) - Wikipedia, The Free EncyclopediaДокумент3 страницыCamber (Aerodynamics) - Wikipedia, The Free EncyclopediaPallav AnandОценок пока нет
- ASA 2014 Catalog WebДокумент48 страницASA 2014 Catalog WebAgungCahyaОценок пока нет
- NASA: 71300main 03-073Документ2 страницыNASA: 71300main 03-073NASAdocumentsОценок пока нет
- Antena 20mhz - 6ghzДокумент6 страницAntena 20mhz - 6ghzCris VMОценок пока нет
- MAE 1202 Lab HMK 3Документ3 страницыMAE 1202 Lab HMK 3Andrew GilbrideОценок пока нет
- Design of Turbine BladeДокумент15 страницDesign of Turbine BladeKailash Chauhan100% (1)
- A Project Report On "Training and Development of HAL"Документ60 страницA Project Report On "Training and Development of HAL"snehaldoddamaniОценок пока нет
- Ch09 Stress TransformationДокумент116 страницCh09 Stress TransformationMatthew MartinezОценок пока нет
- Linear Aerospike EngineДокумент51 страницаLinear Aerospike EngineSanad ShajahanОценок пока нет
- A320 Technical NotesДокумент118 страницA320 Technical NotesAnimesh RanjanОценок пока нет
- Certification Memorandum: Criteria For The Determination of The EASA Level of Involvement in Product CertificationДокумент79 страницCertification Memorandum: Criteria For The Determination of The EASA Level of Involvement in Product Certificationsezgin bayramОценок пока нет
- Question Paper For Internal Assessment Examination (Theory) - Credit 4 / 45Документ6 страницQuestion Paper For Internal Assessment Examination (Theory) - Credit 4 / 45Garkal AjinkyaОценок пока нет
- 3D Incompressible Navier-Stokes Solver Lower-Gauss-Seidel AlgorithmДокумент1 страница3D Incompressible Navier-Stokes Solver Lower-Gauss-Seidel Algorithmscience1990Оценок пока нет
- Edited Edited Edited Edited 1Документ2 страницыEdited Edited Edited Edited 1mahmoud cheaibОценок пока нет
- Ball and Socket Gimbal - Solid Rocket Thrust VectorДокумент12 страницBall and Socket Gimbal - Solid Rocket Thrust VectorJunior MirandaОценок пока нет
- Design and Blade Optimization of Contra Rotation D PDFДокумент10 страницDesign and Blade Optimization of Contra Rotation D PDFmartijantiОценок пока нет
- Drag Force ExperimentДокумент12 страницDrag Force ExperimentRyshal ZeffreyОценок пока нет