Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Leonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoДокумент4 страницыLeonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDulce M. LupaseОценок пока нет
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Документ28 страницCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaОценок пока нет
- Number Patterns and SequencesДокумент10 страницNumber Patterns and SequencesMohamed Hawash80% (5)
- Sample Paper III (Science) - Question PaperДокумент21 страницаSample Paper III (Science) - Question Paperfathima MiranОценок пока нет
- Cat Hammers C842898Документ8 страницCat Hammers C842898maggioraОценок пока нет
- Physics Sample Question PaperДокумент9 страницPhysics Sample Question PaperVarsha SharmaОценок пока нет
- 3 Perform Industry CalculationsДокумент90 страниц3 Perform Industry CalculationsRobinson ConcordiaОценок пока нет
- Pavement Materials - AggregatesДокумент14 страницPavement Materials - AggregatestombasinghОценок пока нет
- Apl 220014Документ2 страницыApl 220014Elprince MidoОценок пока нет
- 1982 International Rectifier Hexfet Databook PDFДокумент472 страницы1982 International Rectifier Hexfet Databook PDFetmatsudaОценок пока нет
- Python Unit 1Документ18 страницPython Unit 1Rtr. Venkata chetan Joint secretaryОценок пока нет
- Machine Fault Detection Using Vibration Signal Peak DetectorДокумент31 страницаMachine Fault Detection Using Vibration Signal Peak Detectordavison coyОценок пока нет
- Agilis AAV680 FullC PDFДокумент2 страницыAgilis AAV680 FullC PDFhendpraz88Оценок пока нет
- Best Approach: Compound AngleДокумент8 страницBest Approach: Compound AngleAbhiyanshu KumarОценок пока нет
- Review Paper - Evolution of CMOS Ring OscillatorДокумент10 страницReview Paper - Evolution of CMOS Ring OscillatorNor Samida YaacobОценок пока нет
- Ra 6938Документ2 страницыRa 6938GaryОценок пока нет
- JSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogДокумент7 страницJSF + JPA + JasperReports (Ireport) Part 2 - Ramki Java BlogMartin MurciegoОценок пока нет
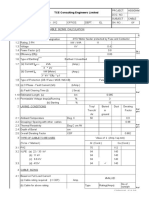
- Cable Sizing CalculationДокумент72 страницыCable Sizing CalculationHARI my songs100% (1)
- Bodybuilder Guidelines: Update: 2011-22Документ438 страницBodybuilder Guidelines: Update: 2011-22thkimzone73100% (12)
- Dawn C. Meredith, Meaning MakingДокумент2 страницыDawn C. Meredith, Meaning MakingMrsriyansyahОценок пока нет
- Aeon7200 Service Manual-V00.01-A4Документ37 страницAeon7200 Service Manual-V00.01-A4annaya kitaОценок пока нет
- Ruby On Rails 3 Cheat SheetДокумент7 страницRuby On Rails 3 Cheat SheetJarosław MedwidОценок пока нет
- Avh-X8550bt Operating Manual Eng-Esp-PorДокумент7 страницAvh-X8550bt Operating Manual Eng-Esp-PorRannie IsonОценок пока нет
- Baulkham Hills 2012 2U Prelim Yearly & SolutionsДокумент11 страницBaulkham Hills 2012 2U Prelim Yearly & SolutionsYe ZhangОценок пока нет
- MA201 Mechanical Vertical Machining Center 133-134Документ2 страницыMA201 Mechanical Vertical Machining Center 133-134Ali HashmiОценок пока нет
- Mathematical Analysisand Optimizationfor EconomistsДокумент4 страницыMathematical Analysisand Optimizationfor EconomistsGuillermo GómezОценок пока нет
- JPSP - 2022 - 698Документ10 страницJPSP - 2022 - 698hifeztobgglОценок пока нет
- Histograms - 2Документ6 страницHistograms - 2Sonia HalepotaОценок пока нет
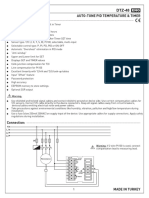
- Auto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3Документ4 страницыAuto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3sharawany 20Оценок пока нет
- Detection of Repetitive Forex Chart PatternsДокумент8 страницDetection of Repetitive Forex Chart PatternsDwight ThothОценок пока нет