Вам также может понравиться
- Correction de DentureДокумент5 страницCorrection de DenturetopjobОценок пока нет
- BEC4841-défauts Dentures PDFДокумент136 страницBEC4841-défauts Dentures PDFytupidОценок пока нет
- Compte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceДокумент10 страницCompte Rendu:: Influence Des Paramètres de Coupe Sur L'état de SurfaceFerchichi HajerОценок пока нет
- TP 2 MetroДокумент10 страницTP 2 MetroGOUAL SaraОценок пока нет
- EngrenagesДокумент12 страницEngrenagesMouwadine Moussa100% (1)
- Rapport de Projet de Fin D'étudeДокумент15 страницRapport de Projet de Fin D'étudeAyoub ElcaidiОценок пока нет
- TP1 (Etude de Freins A Disque)Документ4 страницыTP1 (Etude de Freins A Disque)zehii ghofran100% (1)
- TP Engrenages 1 - V1 - 2017 - 2018Документ8 страницTP Engrenages 1 - V1 - 2017 - 2018IMANE LOLОценок пока нет
- TP Verin Hydraulique EleveДокумент3 страницыTP Verin Hydraulique EleveHatem Laajili100% (1)
- Ci3 TDДокумент5 страницCi3 TDNibrasse Saidani100% (2)
- TARIERE ELECTRIQUE: Analyse FonctionnelleДокумент34 страницыTARIERE ELECTRIQUE: Analyse FonctionnellengouoОценок пока нет
- TH8115Документ129 страницTH8115dado djanatiОценок пока нет
- TP RobotiqueДокумент7 страницTP RobotiqueSalma El BouzidiОценок пока нет
- Les Douille À Billes PDFДокумент50 страницLes Douille À Billes PDFNadia DridiОценок пока нет
- TD - Vérin Rotatif AmortiДокумент5 страницTD - Vérin Rotatif AmortiLAILA BNОценок пока нет
- DC3 2èmeSC2 22 23Документ6 страницDC3 2èmeSC2 22 23Adam BenОценок пока нет
- Equilibrage Dynamique PDFДокумент3 страницыEquilibrage Dynamique PDFMustafa MoussaouiОценок пока нет
- Catalogue Choix Vérins HydrauliquesДокумент60 страницCatalogue Choix Vérins HydrauliquesStephane Tchoriang100% (1)
- TP1 - Banc D'essai de Flexion - TomДокумент17 страницTP1 - Banc D'essai de Flexion - TomNancy DakdoukiОценок пока нет
- Analyse Fonctionnelle - Etude de CasДокумент1 страницаAnalyse Fonctionnelle - Etude de Casayoub basslam0% (1)
- Flexion Simple (Bras Manipulateur)Документ2 страницыFlexion Simple (Bras Manipulateur)SERGIOОценок пока нет
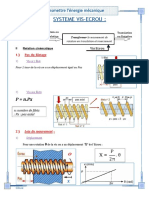
- Mecanisme de Transformation de Mouvement Systeme Vis EcrouДокумент5 страницMecanisme de Transformation de Mouvement Systeme Vis EcrouMhB SaAdОценок пока нет
- Contrat de Phase Bielle Phase 10Документ1 страницаContrat de Phase Bielle Phase 10El Habib CherqaouiОценок пока нет
- td3 Ci1 Capteur CorДокумент4 страницыtd3 Ci1 Capteur CorbecemОценок пока нет
- 9 7 TD 3 CorrectionДокумент6 страниц9 7 TD 3 CorrectionToute EtudeОценок пока нет
- Rapport de Mini Projet DДокумент17 страницRapport de Mini Projet DOumar TraoréОценок пока нет
- COMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Документ16 страницCOMPTE RENDU (TP TOUR NUMERIQUE) Yamen Darguech CF22Salma Rekik100% (1)
- TD Conception2 - RévisionДокумент6 страницTD Conception2 - RévisionBokou KhalfaОценок пока нет
- 3 DS2 - DT 2020 - 2021Документ5 страниц3 DS2 - DT 2020 - 2021Elafif Hamdi100% (1)
- Catalogue 2016 E9.1 FR WebДокумент277 страницCatalogue 2016 E9.1 FR WebNicolas AguilarОценок пока нет
- 16-Polie Courroie PDFДокумент2 страницы16-Polie Courroie PDFHanane TounsiОценок пока нет
- Méthodes Alignement Des Systèmes de TransmissionДокумент13 страницMéthodes Alignement Des Systèmes de TransmissionYacine SougaОценок пока нет
- Ptv-Roue À GorgeДокумент5 страницPtv-Roue À Gorgeadem bengharsaОценок пока нет
- Activité Semelles ConnectéesДокумент7 страницActivité Semelles Connectéesdahech hichemОценок пока нет
- Presentation Picos18Документ22 страницыPresentation Picos18Saf Bes100% (1)
- Cours Techniques D'usinage AvancéesДокумент79 страницCours Techniques D'usinage AvancéesFadwa ZRОценок пока нет
- Isostatisme MipДокумент9 страницIsostatisme Mipmaraghni_hassine7592Оценок пока нет
- MMTДокумент16 страницMMTBassema ZIОценок пока нет
- TP 01 Métrologie Oulmahdi SofianeДокумент5 страницTP 01 Métrologie Oulmahdi SofianeSofianeОценок пока нет
- Chapitre 2Документ18 страницChapitre 2riad chouiterОценок пока нет
- TD N°2 Maintenance - CNDДокумент2 страницыTD N°2 Maintenance - CNDHB RIMОценок пока нет
- TP Croix de Malte INDEXAДокумент9 страницTP Croix de Malte INDEXASidi RachОценок пока нет
- Devoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFДокумент5 страницDevoir de Synthèse N°3 - Génie Mécanique - Bac Technique (2011-2012) MR Ben Slimen PDFkhocine0% (1)
- Exercices EngrenagesДокумент15 страницExercices EngrenagesmandazrouОценок пока нет
- Nomenclature Reducteur BW40Документ1 страницаNomenclature Reducteur BW40Gaby 1Оценок пока нет
- 32 Loi Entrée Sortie Géométrique D 1Документ6 страниц32 Loi Entrée Sortie Géométrique D 1hsn frk100% (1)
- 16 EX9 PerceuseДокумент1 страница16 EX9 PerceuseChokri Atef100% (1)
- TP2 CAO Croix de MalteДокумент12 страницTP2 CAO Croix de MalteKamel BousninaОценок пока нет
- Calcul SinusДокумент1 страницаCalcul SinusJay SlvatrОценок пока нет
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- Cours Les Engr DentuДокумент11 страницCours Les Engr DentuKader HoumitaОценок пока нет
- Cours Les Engr Dentu DroitesДокумент10 страницCours Les Engr Dentu Droitesben 10Оценок пока нет
- Cours EngrenagesДокумент12 страницCours EngrenageszohirОценок пока нет
- ENGRENAGES DROITS Terminologie Et SymbolesДокумент4 страницыENGRENAGES DROITS Terminologie Et SymbolesHaythem JameiОценок пока нет
- GM3 EngrenagesДокумент94 страницыGM3 Engrenagesghourabisarra8Оценок пока нет
- Cours Engrenages PDFДокумент5 страницCours Engrenages PDFJesuis ContentОценок пока нет
- Cours EngrenagesДокумент5 страницCours EngrenagesJesuis ContentОценок пока нет
- Caractéristiques Des Engrenages Droits CylindriquesДокумент4 страницыCaractéristiques Des Engrenages Droits CylindriquesMinh-Duc DOОценок пока нет
- Les Engrenages (Cours Bac)Документ2 страницыLes Engrenages (Cours Bac)MIMFS86% (43)
- Cours EngrenagesДокумент12 страницCours EngrenagesAhmedОценок пока нет
- L10000 Supply Chain Et LogistiqueДокумент24 страницыL10000 Supply Chain Et LogistiqueMohamed ElbaghdadiОценок пока нет
- Cours - Aérodynamique Des Aéronefs P1-1Документ17 страницCours - Aérodynamique Des Aéronefs P1-1Mohamed ElbaghdadiОценок пока нет
- Corrosion DE LA ZONE OurhoudДокумент57 страницCorrosion DE LA ZONE OurhoudMohamed ElbaghdadiОценок пока нет
- Corrosion DE LA ZONE OurhoudДокумент57 страницCorrosion DE LA ZONE OurhoudMohamed ElbaghdadiОценок пока нет
- A Dessin TechniqueДокумент38 страницA Dessin Techniqueyassine22Оценок пока нет
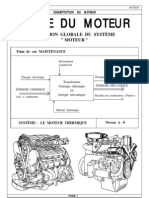
- Constitution Du MoteurДокумент7 страницConstitution Du MoteurAymen Khadhraoui67% (9)
- A JustementДокумент35 страницA JustementMohamed ElbaghdadiОценок пока нет
- Soudure Representation SymboliqueДокумент6 страницSoudure Representation Symboliquezzrakoto0% (1)
- Module de Formation DrapageДокумент79 страницModule de Formation DrapageMohamed ElbaghdadiОценок пока нет
- Dessin Technique - Exercices D'entrainementДокумент28 страницDessin Technique - Exercices D'entrainementMohamed ElbaghdadiОценок пока нет
- LE SOUDAGE 4.1. Generalites PDFДокумент18 страницLE SOUDAGE 4.1. Generalites PDFghodbaneОценок пока нет
- Constitution Du MoteurДокумент7 страницConstitution Du MoteurAymen Khadhraoui67% (9)
- A JustementДокумент35 страницA JustementMohamed ElbaghdadiОценок пока нет
- Dessin Technique - Exercices D'entrainementДокумент28 страницDessin Technique - Exercices D'entrainementMohamed ElbaghdadiОценок пока нет
- Technologie Des AéronefsДокумент158 страницTechnologie Des AéronefsMohamed ElbaghdadiОценок пока нет
- Dessine TechniqueДокумент28 страницDessine TechniqueMohamed ElbaghdadiОценок пока нет
- A JustementДокумент35 страницA JustementMohamed ElbaghdadiОценок пока нет
- Constitution Du MoteurДокумент7 страницConstitution Du MoteurAymen Khadhraoui67% (9)
- Tracabilite CharvetДокумент55 страницTracabilite CharvetMohamed ElbaghdadiОценок пока нет
- Engrenages Droits Denture HelicoidaleДокумент4 страницыEngrenages Droits Denture HelicoidaleMohamed ElbaghdadiОценок пока нет
- Soudage Et Control PDFДокумент34 страницыSoudage Et Control PDFDODOHICHAMОценок пока нет
- La Maintenance Pres1 (01-03)Документ49 страницLa Maintenance Pres1 (01-03)LouhabAberbourОценок пока нет
- La Maintenance Pres1 (01-03)Документ49 страницLa Maintenance Pres1 (01-03)LouhabAberbourОценок пока нет
- Technologie AvionДокумент10 страницTechnologie AvionMohamed ElbaghdadiОценок пока нет
- Les EngrenagesДокумент10 страницLes Engrenagessouheil_souОценок пока нет
- Aeronautique MaintenanceДокумент66 страницAeronautique MaintenanceJoe Buedalouco100% (1)
- 2 Connaissances Des Aéronefs KITCHENER Bia Caen (6) AMCAДокумент91 страница2 Connaissances Des Aéronefs KITCHENER Bia Caen (6) AMCAMohamed ElbaghdadiОценок пока нет
- Les Embrayages Et Les FreinsДокумент4 страницыLes Embrayages Et Les FreinsMIMFS88% (17)
- A JustementДокумент35 страницA JustementMohamed ElbaghdadiОценок пока нет
- Connaissance Des Aeronefs-V4EДокумент46 страницConnaissance Des Aeronefs-V4EMohamed ElbaghdadiОценок пока нет
- Rapport Sur Le TP Des Mouvements Harmoniques SimplesДокумент14 страницRapport Sur Le TP Des Mouvements Harmoniques SimplesHamza BoutlihОценок пока нет
- NISSAN. - Voir Au Verso. Fiche TechniqueДокумент12 страницNISSAN. - Voir Au Verso. Fiche TechniqueAliОценок пока нет
- Cotation Fonctionnelle Bac TunisieДокумент12 страницCotation Fonctionnelle Bac TunisieGana100% (1)
- FR Cherubini Cat Acc Manuels PDFДокумент119 страницFR Cherubini Cat Acc Manuels PDFMURATОценок пока нет
- EXERCICE8Документ12 страницEXERCICE8akouОценок пока нет
- Fise Tehnice Poduri RulanteДокумент6 страницFise Tehnice Poduri RulanteMadalina NaforeanuОценок пока нет
- TD20 CorrectionДокумент6 страницTD20 CorrectionHamza SadikОценок пока нет
- Compresseur 20230516 160542Документ6 страницCompresseur 20230516 160542Salah SalhixОценок пока нет
- Transmission Resume PDFДокумент40 страницTransmission Resume PDFAhmed ElGhafiriОценок пока нет
- OUPE-2.FINIДокумент4 страницыOUPE-2.FINIhousinmechani1Оценок пока нет
- AssemblagesДокумент9 страницAssemblagesChokri Atef100% (1)
- Les VISДокумент4 страницыLes VISSlah SametОценок пока нет
- Chap2 Lembrayage Mécanique - E. LerningДокумент11 страницChap2 Lembrayage Mécanique - E. LerningDavid100% (1)
- Schéma de Fusibles Et Relais Pour Renault Clio II (1999-2005) - Schémas de Boîtes À FusiblesДокумент17 страницSchéma de Fusibles Et Relais Pour Renault Clio II (1999-2005) - Schémas de Boîtes À FusiblesMattathiaОценок пока нет
- Préparation InterventionДокумент13 страницPréparation InterventionMehrez ZaafouriОценок пока нет
- Moteurs: Caractéristiques CaractéristiquesДокумент31 страницаMoteurs: Caractéristiques Caractéristiquestoni13021302Оценок пока нет
- Controle Transmission de MouvementДокумент3 страницыControle Transmission de MouvementTelli TarekОценок пока нет
- Cours Assemblages CompletДокумент8 страницCours Assemblages CompletNeymar DasilvaОценок пока нет
- LEVAC ArrimagesДокумент16 страницLEVAC Arrimagesscribd30360Оценок пока нет
- TMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEДокумент8 страницTMM2 GIM Sujet 1 ROUE DE MOTEUR HYDRAULIQUEThierry BoulayОценок пока нет
- WP 4054 4357Документ55 страницWP 4054 4357Arnaud GressierОценок пока нет
- Upload - Série D'exercices N°8-3tech-Grafcet1-2013-2014Документ14 страницUpload - Série D'exercices N°8-3tech-Grafcet1-2013-2014admmehdiОценок пока нет
- 00 Cours Train Epi v9Документ15 страниц00 Cours Train Epi v9stephane dorbeОценок пока нет
- 3923 Dossier Technique Etude Dun Systeme Et Ou Dun Processus Technique Caplp Interne GM Option MsmaДокумент24 страницы3923 Dossier Technique Etude Dun Systeme Et Ou Dun Processus Technique Caplp Interne GM Option MsmaFamx xОценок пока нет
- Mazda Car ConfiguratorДокумент7 страницMazda Car ConfiguratorStefano CattaneoОценок пока нет
- MF 580 Super KДокумент224 страницыMF 580 Super Kdavid-eluereОценок пока нет
- 2013-Sherco Manuel 4t WebДокумент190 страниц2013-Sherco Manuel 4t Webulf.meterОценок пока нет
- TCP-06-Terminologies Formes P 45-51Документ7 страницTCP-06-Terminologies Formes P 45-51Med FilaliОценок пока нет
- Trains ÉpicycloïdauxДокумент18 страницTrains ÉpicycloïdauxadibОценок пока нет
- 395A3030 - F - Electrical Installation RulesДокумент129 страниц395A3030 - F - Electrical Installation RulessrisaecОценок пока нет