Вам также может понравиться
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemОт EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemОценок пока нет
- Us V Dwayne Pulliam ComplaintДокумент13 страницUs V Dwayne Pulliam ComplaintCurtis BrodnerОценок пока нет
- Michael Gabor MotionДокумент48 страницMichael Gabor MotionWKYC.comОценок пока нет
- Virgil Bucks: The Revolutionary Cybercurrency On The Net.Документ7 страницVirgil Bucks: The Revolutionary Cybercurrency On The Net.virgiltexasОценок пока нет
- Xxx2016!12!12 Fake Social Media Is Run by The CIA and Creates Fake News To Demonize Truth Tellers and Overturn Trump Election Americans For Innovation Dec 12 2016Документ28 страницXxx2016!12!12 Fake Social Media Is Run by The CIA and Creates Fake News To Demonize Truth Tellers and Overturn Trump Election Americans For Innovation Dec 12 2016Michele DiamondОценок пока нет
- Antrim County Forensics ReportДокумент23 страницыAntrim County Forensics ReportMaurA Dowling100% (6)
- Madoff Trustee's Summary of Cash Transfers by PicowerДокумент3 страницыMadoff Trustee's Summary of Cash Transfers by PicowerDealBookОценок пока нет
- Access To Family Building Bill 2024Документ9 страницAccess To Family Building Bill 2024Alanna VagianosОценок пока нет
- NSA Leaks August 25, ICREACH, CRISSCROSS, PROTON, Ed Snowden 2014 Sharing Communications Metadata Across The USДокумент36 страницNSA Leaks August 25, ICREACH, CRISSCROSS, PROTON, Ed Snowden 2014 Sharing Communications Metadata Across The USUSNEWSGHOSTОценок пока нет
- 2015-Dec Secret Service Report From The House Oversight CommitteeДокумент438 страниц2015-Dec Secret Service Report From The House Oversight CommitteeZenger NewsОценок пока нет
- Cuddle Buddy Application by Ebrithil D3dv2isДокумент1 страницаCuddle Buddy Application by Ebrithil D3dv2isJhnny X HkimОценок пока нет
- Master-15-03984 Habeus Case Recorded DECLARATION Re ONLINE REGISTRATION FFCHS Re Fictitious Name by Stan J. Caterbone On March 25, 2016Документ173 страницыMaster-15-03984 Habeus Case Recorded DECLARATION Re ONLINE REGISTRATION FFCHS Re Fictitious Name by Stan J. Caterbone On March 25, 2016Stan J. CaterboneОценок пока нет
- JW V State Benghazi Salafi 01733Документ5 страницJW V State Benghazi Salafi 01733fredvlucasОценок пока нет
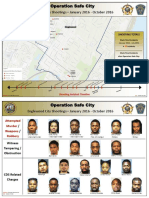
- Operation Safe City DocumentsДокумент6 страницOperation Safe City DocumentsDaniel HubbardОценок пока нет
- 2022 SPD Crime Report FinalДокумент22 страницы2022 SPD Crime Report FinalHannah KnowlesОценок пока нет
- Combine Seminar On HackingДокумент20 страницCombine Seminar On HackingDr. Hitesh MohapatraОценок пока нет
- UCLA Journal of International Law and Foreign Affairs: TitleДокумент49 страницUCLA Journal of International Law and Foreign Affairs: TitleThepat RiotОценок пока нет
- Providence Lawsuit Over Social MediaДокумент66 страницProvidence Lawsuit Over Social MediaNBC 10 WJARОценок пока нет
- XKeyscoreДокумент10 страницXKeyscoreMichael RyanОценок пока нет
- American Lock Build Date Code ToolДокумент7 страницAmerican Lock Build Date Code TooldosmasterОценок пока нет
- Calabrese Internal Affairs ReportДокумент15 страницCalabrese Internal Affairs ReportDavid KomerОценок пока нет
- Vol30 No2 KatesMauseronlineДокумент46 страницVol30 No2 KatesMauseronlineabcabc123123xyzxyxОценок пока нет
- Samir Khan 110414Документ259 страницSamir Khan 110414Ky HendersonОценок пока нет
- 10 October 1996Документ112 страниц10 October 1996Monitoring TimesОценок пока нет
- U.S. Federal District Court Filing in WA State: Misprision of Felony & Treason Against U.S. Plus Memorandum of Law FilingДокумент15 страницU.S. Federal District Court Filing in WA State: Misprision of Felony & Treason Against U.S. Plus Memorandum of Law Filingprotectourliberty100% (1)
- Ikea Catalogue en AeДокумент145 страницIkea Catalogue en AeAsadAliОценок пока нет
- Trans Union Fraud Deeds MemoДокумент1 страницаTrans Union Fraud Deeds Memoizraul hidashiОценок пока нет
- 15 Motion To AmendДокумент3 страницы15 Motion To AmendN.S. Fuller, Esq.Оценок пока нет
- Chimene Hamilton Onyeri IndictmentДокумент27 страницChimene Hamilton Onyeri IndictmentkxanwebteamОценок пока нет
- H.B. 1020 RulingДокумент45 страницH.B. 1020 RulingAnthony Warren100% (1)
- 33 Tehama LawsuitДокумент44 страницы33 Tehama LawsuitMarcus WhiteОценок пока нет
- AdmissionERPInstruction KharagpurДокумент8 страницAdmissionERPInstruction KharagpurVijay NaikОценок пока нет
- Epstein Death Messages 044 046Документ4 страницыEpstein Death Messages 044 046Gods WrathОценок пока нет
- Criminal Possession of A Forged Instrument Second DegreeДокумент7 страницCriminal Possession of A Forged Instrument Second DegreeAdam ForgieОценок пока нет
- Under Seal: Code Section Offense DescriptionДокумент24 страницыUnder Seal: Code Section Offense DescriptionJ RohrlichОценок пока нет
- Liggins Et Al Indictment 0Документ11 страницLiggins Et Al Indictment 0troy187Оценок пока нет
- Trump Presidency 13 - August 11, 2017 - August 23, 2017Документ509 страницTrump Presidency 13 - August 11, 2017 - August 23, 2017FW040Оценок пока нет
- Harvard - Would Banning Firearms Reduce Murders and SuicideДокумент46 страницHarvard - Would Banning Firearms Reduce Murders and SuicideAndrew Dysart100% (12)
- Lilliput Monitor FA1013 InstructionsДокумент10 страницLilliput Monitor FA1013 InstructionsMic McОценок пока нет
- Monitoring Times 2012-04 Apr LowresДокумент80 страницMonitoring Times 2012-04 Apr Lowresscribd3822100% (1)
- SubpoenaДокумент4 страницыSubpoenaTHROnlineОценок пока нет
- The Medicare Disadvantage: How Insurers Game The System and Commit FraudДокумент76 страницThe Medicare Disadvantage: How Insurers Game The System and Commit FraudRajendra SoniОценок пока нет
- Kashinsky v. Murphy - Amended ComplaintДокумент14 страницKashinsky v. Murphy - Amended ComplaintAmmoLand Shooting Sports NewsОценок пока нет
- NFLPA's Petition To Vacate Tom Brady SuspensionДокумент54 страницыNFLPA's Petition To Vacate Tom Brady SuspensionNESNdocs100% (1)
- RoskefbiДокумент28 страницRoskefbiWashington ExaminerОценок пока нет
- Sarasota PD Internal InvestigationДокумент69 страницSarasota PD Internal Investigation10News WTSPОценок пока нет
- Inductance and Capacitance Meter Adapter Using 74HC132Документ6 страницInductance and Capacitance Meter Adapter Using 74HC132Miguelangel Bravo MigoneОценок пока нет
- 2022 People of The State of V People of The State of Memorandum of Law I 38Документ26 страниц2022 People of The State of V People of The State of Memorandum of Law I 38Washington ExaminerОценок пока нет
- A Real Time Novel Technique For Controlling CNC SystemДокумент9 страницA Real Time Novel Technique For Controlling CNC SystemakashlogicОценок пока нет
- Arduino DroneДокумент16 страницArduino DroneBằng Trần DuyОценок пока нет
- Making Laser Engraving Circuit Boards in ElectronicsДокумент13 страницMaking Laser Engraving Circuit Boards in ElectronicsjackОценок пока нет
- CNC Based Pen Using Arduino: Mayur U. Ladhe and Dr. D. V. RojatkarДокумент3 страницыCNC Based Pen Using Arduino: Mayur U. Ladhe and Dr. D. V. Rojatkarandri enggopОценок пока нет
- Speedometer-Cum-odometer For MotorbikeДокумент6 страницSpeedometer-Cum-odometer For MotorbikeAnonymous 8pCXXs100% (2)
- Embedded LaboratoryДокумент95 страницEmbedded LaboratoryRajkumar kkОценок пока нет
- Automatic Mini CNC Machine For PCB Drawing and DrillingДокумент5 страницAutomatic Mini CNC Machine For PCB Drawing and DrillingSaifulla ShariffОценок пока нет
- Interfacing Nokia ScreenДокумент4 страницыInterfacing Nokia ScreenDavid Sanderson100% (2)
- Mini CNC Machine Project ReportДокумент32 страницыMini CNC Machine Project ReportNaimish Sukhadeve83% (6)
- CapstoneДокумент16 страницCapstoneHarsh ShahОценок пока нет
- Embedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationДокумент111 страницEmbedded Lab: Kgisl Institute of Technology Department of Electronics and CommunicationJeeva NatarajanОценок пока нет
- Prepaid Energy MeterДокумент13 страницPrepaid Energy MeterSiddu R SidduОценок пока нет
- Implementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapДокумент9 страницImplementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapMuhammad AdhipatiunusОценок пока нет
- Echotrac CVM User ManualДокумент48 страницEchotrac CVM User Manualyusuf wardhaniОценок пока нет
- Library Management System ReportДокумент23 страницыLibrary Management System ReportUdupiSri groupОценок пока нет
- Loops and Conditionals in MATLABДокумент6 страницLoops and Conditionals in MATLABawais anwarОценок пока нет
- Web Service Composition ThesisДокумент5 страницWeb Service Composition Thesisdnqj27m0100% (2)
- Minitab 16 Full Version Download Full Version Software Key Serial Number Patch Available Crack PDFДокумент8 страницMinitab 16 Full Version Download Full Version Software Key Serial Number Patch Available Crack PDFMondal Raju0% (1)
- RU Emu ManualДокумент86 страницRU Emu ManualEgor KaufmanОценок пока нет
- From Zero To Hero: Architecture & System DesignДокумент22 страницыFrom Zero To Hero: Architecture & System Designmjc45Оценок пока нет
- Web Form Validation - Best Practices and TutorialsДокумент23 страницыWeb Form Validation - Best Practices and Tutorialsmdelrosso2Оценок пока нет
- Nov Dec 2014Документ4 страницыNov Dec 2014abdnazar2003Оценок пока нет
- UntitledДокумент9 страницUntitledAriel MeridaОценок пока нет
- Vapp Deployment and Configuration Guide: Vcenter Operations Manager 5.6Документ38 страницVapp Deployment and Configuration Guide: Vcenter Operations Manager 5.6Juan Pablo Zamora G.Оценок пока нет
- Artificial Intelligence (18Csc305J) Lab: EXPERIMENT 13: Implementation of NLP ProblemДокумент9 страницArtificial Intelligence (18Csc305J) Lab: EXPERIMENT 13: Implementation of NLP ProblemSAILASHREE PANDAB (RA1911032010030)Оценок пока нет
- Prosa de Estado y Estados de La Prosa-Marcelo CohenДокумент8 страницProsa de Estado y Estados de La Prosa-Marcelo CohenLauraОценок пока нет
- Ricoh IM C2000 IM C2500: Full Colour Multi Function PrinterДокумент4 страницыRicoh IM C2000 IM C2500: Full Colour Multi Function PrinterKothapalli ChiranjeeviОценок пока нет
- Stm32 Spi 9bit On UsartДокумент6 страницStm32 Spi 9bit On UsartcacatcumuciОценок пока нет
- Wavestar Dacs 4/4/1 Introduction and O&M: Patrick Wu Qacc &tsoДокумент38 страницWavestar Dacs 4/4/1 Introduction and O&M: Patrick Wu Qacc &tsoDaiAnShengОценок пока нет
- Stm8 Programming ManualДокумент162 страницыStm8 Programming ManualimpulstekОценок пока нет
- Buying Purchasing Hardware Software WorkstationДокумент9 страницBuying Purchasing Hardware Software WorkstationYadu Priya DeviОценок пока нет
- Jigar CVДокумент3 страницыJigar CVpoonam jainОценок пока нет
- Itens Expolux-R04Документ71 страницаItens Expolux-R04Murilo DypleОценок пока нет
- Vba Code For Rows InsertonДокумент8 страницVba Code For Rows InsertonARP MEILОценок пока нет
- KuppingerCole - Executive View - Illusive - Platform-Technical Validation of Illusive PlatformДокумент11 страницKuppingerCole - Executive View - Illusive - Platform-Technical Validation of Illusive PlatformShahram SametОценок пока нет
- Price ListДокумент4 страницыPrice Listmadd4uОценок пока нет
- ICS 223: Transaction Processing and Distributed Data Management Winter 2011Документ11 страницICS 223: Transaction Processing and Distributed Data Management Winter 2011Reese FrasierОценок пока нет
- Resume Vikas PhulriyaДокумент3 страницыResume Vikas PhulriyaVikas PhulriyaОценок пока нет
- Micro-Scope Software Version 12 Technical ManualДокумент218 страницMicro-Scope Software Version 12 Technical Manualellunar77279Оценок пока нет
- CS Project FinalДокумент15 страницCS Project FinalTaarun SridharОценок пока нет
- Quiz 2aДокумент5 страницQuiz 2aad11010010Оценок пока нет
- 21ELN24 - Question Bank For ExamДокумент4 страницы21ELN24 - Question Bank For ExamEmail ServiceОценок пока нет