Вам также может понравиться
- Tabla de Codigos para LetrasДокумент3 страницыTabla de Codigos para LetrasMan Ga PeОценок пока нет
- About WieДокумент3 страницыAbout WieMan Ga PeОценок пока нет
- Motion Control Portfolio Overview Customer May2020 PDFДокумент41 страницаMotion Control Portfolio Overview Customer May2020 PDFLuis Hoyos Bautista100% (1)
- 2015pro S AssemblingДокумент16 страниц2015pro S AssemblingMan Ga PeОценок пока нет
- B9018 EP TestingДокумент5 страницB9018 EP TestingMan Ga PeОценок пока нет
- 2015 - Pro Program InstallationДокумент20 страниц2015 - Pro Program InstallationMan Ga PeОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- W201 SA Code ListДокумент106 страницW201 SA Code ListFotoniОценок пока нет
- zf4hp22 24Документ10 страницzf4hp22 24Novers Ma Rres100% (1)
- Air Compressor Flange Removal and Installation Has Been Added To The Workshop ManualДокумент4 страницыAir Compressor Flange Removal and Installation Has Been Added To The Workshop ManualChandra SutawijayaОценок пока нет
- Auction Pricelist 032522Документ26 страницAuction Pricelist 032522wallen dОценок пока нет
- Red Cat Shockwave ManualДокумент1 страницаRed Cat Shockwave ManualGuillermoОценок пока нет
- 5N Basic EquipmentДокумент25 страниц5N Basic EquipmentAlexОценок пока нет
- Passenger Compartment Fuse Box PDFДокумент7 страницPassenger Compartment Fuse Box PDFRolando Alfaro NuñezОценок пока нет
- AS23 GCC&SA&MX Service Diagnosis and Measurement Manual-20200605Документ2 179 страницAS23 GCC&SA&MX Service Diagnosis and Measurement Manual-20200605Curihuinca DanielОценок пока нет
- SD313-4 MFI Control System (G4FC-GSL 1.6L)Документ1 страницаSD313-4 MFI Control System (G4FC-GSL 1.6L)Luis GarcíaОценок пока нет
- Mep 946 SP-1Документ3 страницыMep 946 SP-1RECAMBIOSYMAQUINASCOMОценок пока нет
- TATA BOLT Accessories BrochureДокумент2 страницыTATA BOLT Accessories BrochureHarshal DhanawadeОценок пока нет
- LHD2000 - 2002EN Ranger Esquuema ElectricoДокумент148 страницLHD2000 - 2002EN Ranger Esquuema Electricogusycaro100% (1)
- COOLING FAN - Honda Civic LX 2014 - SYSTEM WIRING DIAGRAMSДокумент2 страницыCOOLING FAN - Honda Civic LX 2014 - SYSTEM WIRING DIAGRAMSLucas Matheus Kohler100% (1)
- 6661 InstructionsДокумент2 страницы6661 InstructionsGround ViewОценок пока нет
- 5E Utility Tractors 5075E John Deere USДокумент5 страниц5E Utility Tractors 5075E John Deere USHungagaОценок пока нет
- Suzuki - US Forenza - 2006Документ4 страницыSuzuki - US Forenza - 2006Phuong LeОценок пока нет
- Dodge Service ManualДокумент816 страницDodge Service ManualDiego Hernan PiñeiroОценок пока нет
- Murray 18,5hp Contituação PDFДокумент20 страницMurray 18,5hp Contituação PDFnarciso84traninОценок пока нет
- Bugatti Type 57SCДокумент10 страницBugatti Type 57SCjorge Angel Lope100% (1)
- Att Trans ToolsДокумент72 страницыAtt Trans Toolssharawy12Оценок пока нет
- Employee AbsenteeismДокумент66 страницEmployee Absenteeismbalasubramanianbrinda100% (1)
- Dhea Ayu Recita Dwi Putri. A - 21411093Документ4 страницыDhea Ayu Recita Dwi Putri. A - 21411093Dea AyuОценок пока нет
- 2007 Camry XLE 4Dr Sedan VIN 4T1BE46K57U643713Документ2 страницы2007 Camry XLE 4Dr Sedan VIN 4T1BE46K57U643713greenmdОценок пока нет
- Anti Lock Braking System-Retro Fitment Project - India: Knorr-Bremse GroupДокумент13 страницAnti Lock Braking System-Retro Fitment Project - India: Knorr-Bremse GroupAshwaniKumarОценок пока нет
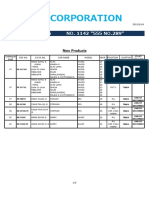
- TMY Corporation Announces New Automotive Parts Products for 2019Документ5 страницTMY Corporation Announces New Automotive Parts Products for 2019Eleazar PavonОценок пока нет
- Ripsaw f4 Datasheet 11821Документ2 страницыRipsaw f4 Datasheet 11821Alhamdi aldhiОценок пока нет
- 2009 Subaru Forester ReviewДокумент5 страниц2009 Subaru Forester ReviewJaphet Charles Japhet MunnahОценок пока нет
- Megane III (x95) - Anti-Lock Braking SystemДокумент20 страницMegane III (x95) - Anti-Lock Braking Systemprueba2Оценок пока нет
- Mazda Mx5 1800 SpecsДокумент3 страницыMazda Mx5 1800 SpecsShaun HolderОценок пока нет
- Khos Khas PM ListДокумент6 страницKhos Khas PM ListJamyansuren TseveendorjОценок пока нет